Изобретение относится к захватным устройствам промышленных роботов и может применяться в различных технологических процессах, где необходима ориентация захвата.
Цель изобретения - расширение технологических возможностей.
Поставленная цель достигается за счет выполнения связи кулисного механизма с губками в виде жестко связанного с кривошипом кронштейна, установленного на захватном рычаге с возможностью поворота и несущего установленную на ступенчатой оси захватную губку.
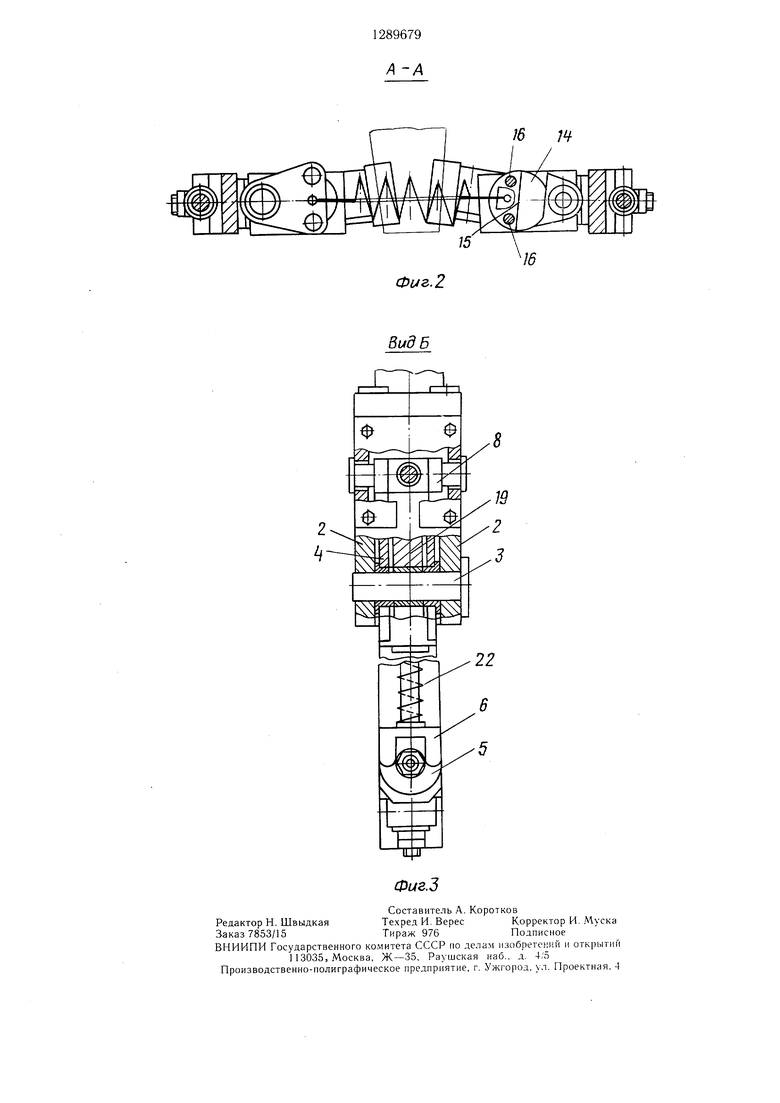
На фиг. 1 представлен схват в момент захвата изделия; на фиг. 2 - разрез А-А иа фиг. 1; на фиг. 3 - вид Б на фиг. 1.
Схват содержит корпус 1 со щеками 2, на которых на осях 3 подвижно установлены двуплечие угловые захватные рычаги 4, на которых расположены кулисные механизмы, состоящие из ползуна 5, расположен- ного в кулисе 6, закрепленной на подпружиненном стержне 7, входящем в поступательную пару с одним плечом двуплечего углового захватного рычага 4. Другое плечо ры
Для разведения губок 13 на размер дечага 4 расположено С возможностью взаимо- 5 тали в исходном положении используется
действия с регулируемыми упорами 8. На осях 9 захватных рычагов 4 неподвижно закреплены ползуны 5, оси 10 и кронштейны 11, на которых на ступенчатых осях 12 закреплены подвижные губки 13. На ступенчатых осях 12 выполнены головки 14 с уступами 15, которые контактируют с пальцами 16, закрепленными в подвижных планках 17, установленных на кронштейнах 11 и соединенных между собой пружиной 18. На осях 3 подвижно установлены зубчатые
сектора 19 с упорами 20 и 21, а на рыча- 35 линдром, кинематическая связь которого с гах 4 закреплены штифты 22 для взаимодей-губками выполнена в виде кулисного мехаствия с указанными упорами. Секторы 19
перемещение винта 24, который останавливает движущую рейку 13 в определенном месте. Для регулирования угла поворота рычага 4 при закрытии захвата используется движение соответствующего регулируемо- 30 го упора 8.
Формула изобретения Схват, содержащий корпус с силовым цизацеплены с рейкой 23, связанной со штоком силового цилиндра (не показан). Для ограничения хода рейки 23 в корпусе 4 ус- .„ тановлен регулировочный винт 24.
Работа схвата осуществляется следующим образом.
Под действием штока силового цилиндра перемещающаяся рейка 23 поворачивает
низма, имеющего ползун, расположенный в кулисе, выполненной на подпружиненном стержне, входящем в поступательную пару с одним плечом двуплечего углового захватного рычага, при этом другое плечо рычага расположено с возможностью взаимодействия с упорами, а каждая губка связана с ползуном кулисного механизма, отличающийся тем, что, с целью расширения техно- зубчатые секторы 19 на осях 3 и вследствие 45 логических возможностей путем обеспече- взаимодействия упоров 20 со штифтами 22ния захвата как цилиндрических, так и копереводит рычаги 4 в исходное положение,нических деталей, связь кулисного механизпри котором схват раскрыт.ма с губками выполнена в виде жестко свяВ исходном положении под действием пружины 18 планки 17 располагаются таким образом, что каждая пара пальцев 16 удерживает соответствующие поверхности уступов 15 в положении, при котором они выставлены перпендикулярно оси пружины 18. Такое взаимное расположение пальзанного с кривошипом кронштейна, который
50
цев 16 относительно уступов 15 препятствуустановлен на захватном рычаге с возможностью поворота и несет установленную на ступенчатой оси захватную губку, причем на кронштейне подвижно установлена планка с пальцами, соединенная пружиной с планкой на кронштейне другого захватного рычага, а упоры выполнены регулируемыми.
ет повороту губок 13 на оси 12 от нейтрального положения.
Вследствие взаимодействия усилий пружин подпружиненных стержней 7 через кулисы 6 на прямолинейные площадки соответствующих ползунов 5 возникают крутящие моменты, препятствующие повороту губок 13 на осях 12 от нейтрального положения.
При включении силового цилиндра на зажим рейка 23 перемещается в противоположном направлении, поворачивая зубчатые секторы 19, при этом упоры 21 выходят из взаимодействия со штифтами 22.
Под действием усилия пружины 18 рычаги поворачиваются на осях 3 до захвата губками 13 детали. При соприкосновении движущихся губок 13 с конической деталью они проворачиваются на осях 12 до полного прилегания их опорных поверхностей к поверхности детали.
При повороте осей 12 прямолинейные поверхности уступов 15, упираясь в соответствующие пальцы 16, поворачивают на осях планки 17, растягивая пружину 18.
Для разведения губок 13 на размер де
тали в исходном положении используется
тали в исходном положении используется
перемещение винта 24, который останавливает движущую рейку 13 в определенном месте. Для регулирования угла поворота рычага 4 при закрытии захвата используется движение соответствующего регулируемо- го упора 8.
дром, кинематическая связь которого с ками выполнена в виде кулисного мехаФормула изобретения Схват, содержащий корпус с силовым цизанного с кривошипом кронштейна, который
установлен на захватном рычаге с возможностью поворота и несет установленную на ступенчатой оси захватную губку, причем на кронштейне подвижно установлена планка с пальцами, соединенная пружиной с планкой на кронштейне другого захватного рычага, а упоры выполнены регулируемыми.
/1-Д
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438858C2 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2303520C1 |
| Установка для термомеханического упрочнения изделий | 1990 |
|
SU1740454A1 |
| Манипулятор | 1982 |
|
SU1060468A1 |
| Схват манипулятора | 1983 |
|
SU1311923A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| Схват промышленного робота | 1983 |
|
SU1177150A2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191108C1 |
Изобретение относится к захватным устройствам нромышленных роботов и может применяться в различных технологических процессах для захвата цилиндрических и коничес1 их деталей, расширяя таким образом технологические возможности схвата. Схват содержит корпус 1 со щеками 2 и осями 3, на которых подвижно установлены захватные рычаги 4. На рычагах 4 расположены подпружиненные стержни 7, на которых закреплены кулисы 6 с ползунами 5, закрепленными на осях 9, несущих кронштейны 11 с губками 13, закрепленными на ступенчатых осях 12, в головке 14 которых выполнены уступы 15, взаимодействующие с пальцами 16, закрепленными в подвижных планках 17, соединенных пружиной 18. Сведение и разведение рычагов 4 осуществляется от привода, на штоке которого закреплена рейка 23, кинематически связанная с зубчатыми секторами 19, которые з взаимодействуют упорами 20 и 21 со щтиф- тами 22. 3 ил. сл 9 11 2 ю 00 ;о а х
/б 14Фиг. 2
Вид Б
Фие.З
Составитель А. Короткое
Редактор Н. ШвыдкаяТехред И. ВересКорректор И. Муска
Заказ 7853/15Тираж 976Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
1 13035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Схват | 1983 |
|
SU1093546A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Захватное устройство | 1983 |
|
SU1177152A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
