(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ ПРОМЫШЛЕННОГО РОБОТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический следящий привод | 1980 |
|
SU941701A1 |
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| Диагностируемый электрогидравлический силовой следящий привод | 1987 |
|
SU1539729A1 |
| Система гидроприводов дроссельного регулирования | 1983 |
|
SU1155991A1 |
| Интерактивная система управленияРОбОТОМ | 1979 |
|
SU798713A1 |
| Система контурного программного управления манипулятором | 1977 |
|
SU620368A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| Устройство для управления сборочным роботом | 1988 |
|
SU1650429A1 |
| Электрогидравлический усилитель дляупРАВлЕНия МНОгОпОлОСТНыМ пОРшНЕВыМгидРОдВигАТЕлЕМ | 1979 |
|
SU821764A1 |
| Многоканальный электрогидравлический следящий привод | 1989 |
|
SU1642099A1 |
1
Изобретение относится к роботостроению и может быть использовано для управления приводами промышленных роботов для. окраски, сварки, полирования, шлифования.
Известно устройство для управления приводом промышленного робота, содержащее сумматор, блок управления, электромеханический преобразователь, гидроусилитель, гидродвигатель, датчик положения и пружинный механизм 1. Однако оно не обеспечивает разгрузки оператора в процессе программирования.
Наиболее близким техническим решением к изобретению является устройство, содержащее последовательно соединенные блок управления, первый ключ, сумматор, усилитель, электромеханический преобразователь, гидроусилитель и гидродвигатель, связанный с датчиком положения исполнительного органа, выход которого подключен ко входу блока управления и через второй ключ - ко входу сумматора 1.
Известное устройство имеет низкую точность воспроизведения траектории, так как на этапе обучения оператору не удается постоянно обеспечивать точное динамическое совмещение схвата с оптимальной кривой.
Целью изобретения является повышение точности устройства.
Для этого устройство содержит последовательно соединенные датчик перепада давления и третий ключ и последовательно соединенные функциональный преобразователь и четвертый ключ, выход которого подключен к третьему входу сумматора, второй вход которого соединен с выходом третьего ключа, вход функционального преобразователя связан с выходом гидродвигателя, а вход датчика перепада давления - с полостями гидродвигателя.
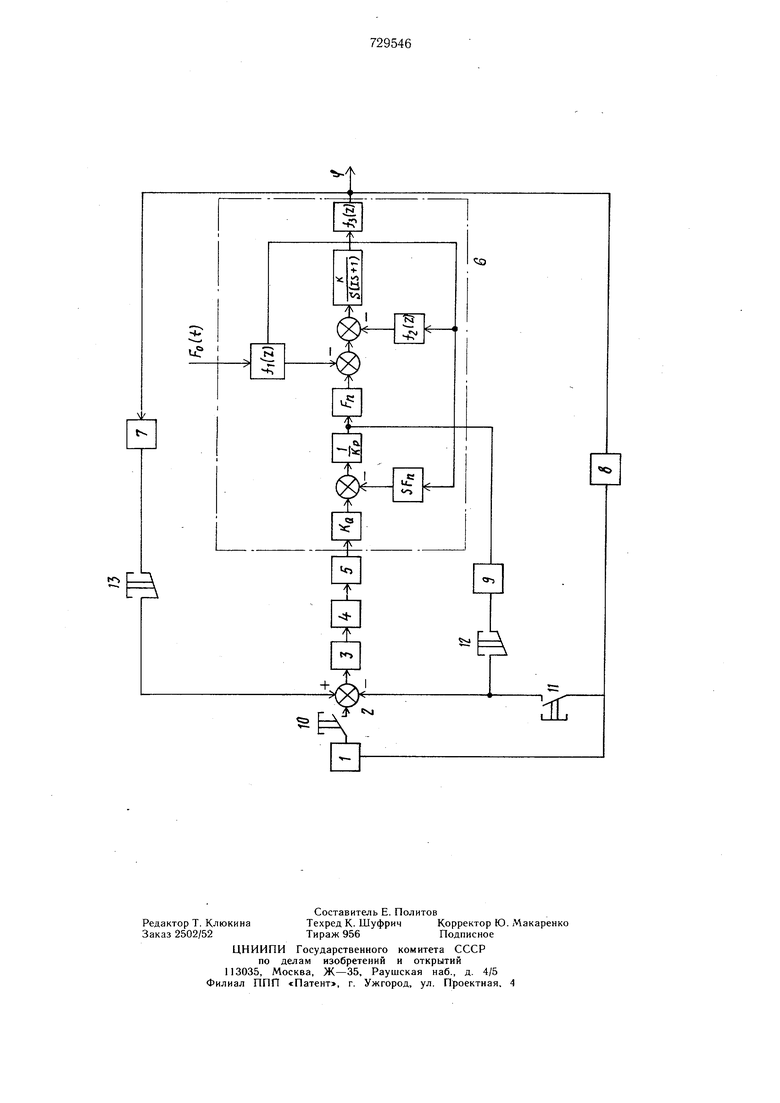
15 На чертеже представлена функциональная схем устройства.
Оно включает блок управления 1, сумматор 2, усилитель 3, электромеханический преобразователь 4, гидроусилитель 5, гидродвигатель 6, функциональный преобразовало тель 7, датчик положения исполнительного органа 8, датчик перепада давления 9, первый, второй, третий и четвертый ключи 10- 13 соответственно. Устройство работает следующим образом. Перед обучением необходимо ключи 12 и 13 замкнуть, а ключи 10 и 11 разомкнуть. Оператор, стремясь переместить схват манипулятора со встроенным в него краскораспылителем в нужном направлении, чтобы произвести окраску заданного изделия, берется за специальные ручки, присоединенные к манипулятору и прикладывает направленное усилие. При этом в определенных звеньях манипулятора происходит разбаланс сигналов с датчика перепада давления 9 и функционального преобразователя 7, в котором заложена зависимость статической нагрузки от угла поворота. В результате этого на сумматоре 2 формируется сигнал рассогласования, который, пройдя через усилитель 3, электрический преобразователь 4 гидроусилитель 5, воздействует на гидродвигатель 6, и звено манипулятора перемещается в направлении, совпадающем с направлением приложения усилия оператора. С датчика положения 8 в блок управления 1 поступает сигнал, формирующий программу. В рабочем режиме при воспроизведении программы ключи 10 и 11 необходимо замкнуть, а ключи 12 и 13 разомкнуть. При этом сигнал, записанный во время обучения, поступает из блока управления на вход сумматора 2 и привод, охваченный обратной связью по положению, начинает его отрабатывать. Применение изобретения позволит повысить точность устройства за счет полного уравновещивания звеньев манипулятора. Формула изобретения Устройство для управления приводом промышленного робота, содержащее последовательно соединенные блок управления, первый ключ, сумматор, усилитель, электромеханический преобразователь, гидроусилитель и гидродвигатель, связанный с датчиком положения исполнительного органа, выход которого подключен ко входу блока управления и через второй ключ - ко второму входу сумматора, отличающееся тем, что, с целью повышения точности, оно содержит последовательно соединенные датчик перепада давления и третий ключ л последовательно соединенные функциональный преобразователь и четвертый ключ, выход которого подсоединен к третьему входу сумматора, второй вход которого соединен с выходом третьего ключа, вход функционального преобразователя связан с выходом гидродвигателя, а вход датчика перепада давления - с полостями гидродвигателя. Источники информации принятые во внимание при экспертизе 1. Заявка Великобритании N° 1485318, кл. G 3 N, опублик. 1977. 2. Белянин П. Н. Промышленные роботы. М., Машиностроение, 1975, с. 75 (прототип) .
