Изобретение относится к электромеханическому преобразованию результатов измерения, а именно к дифференциальным преобразователям линейных перемещений в код.
Цель изобретения - повышение быстродействия измерения перемещения.
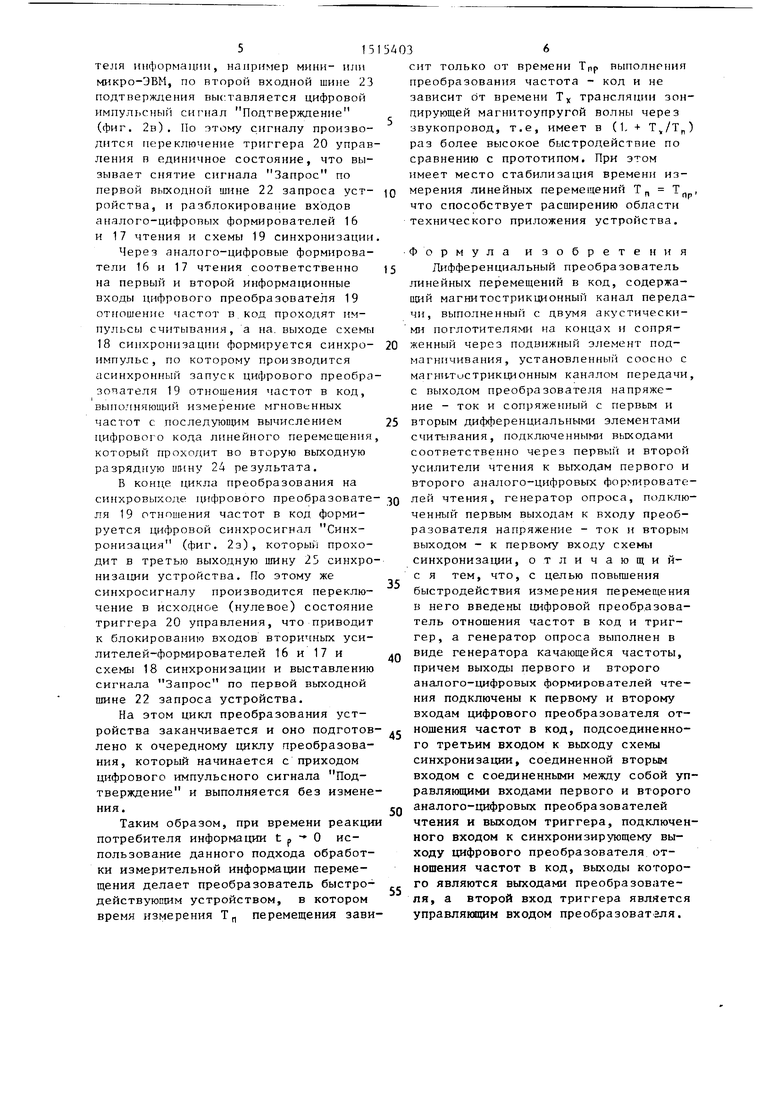
На фиг. 1 приведена функциональная схема дифференциального преобразователя линейных перемещений в код; на фиг. 2 - временная диаграмма его работы.
Дифференциальный преобразователь линейньх перемещений в код содержит магнитострикционный датчик 1 линейных перемещений, состоящий из струнного магннтос грикционного канала 2 переда чи (магнитовод). акустических поглотителей 3 и 4, пассивного стабилизатора 5 растягивающих усилий, подвижного элемента 6 записи электромаг нитного возбуждения с магнитным пол- зуноМ 7 из магнитной жидкости и элементов 8 подмагничивания, двух непод вижных дифференциальных элементов 9 и 10 считывания, преобразователя 11 напряжение - ток и двух усилителей 12 и 13 чтения, и цифровой канал 14 преобразования, состоящий из генератора 15 качающейся частоты, двух аналого-цифровых формирователей 16 и 17 чтения, cxeNflii 18 синхронизации, цифрового преобразователя 19 отношения частот в код и триггера 20. а также парную входную шину 21 управления, первую выходную шину 22 запроса, вторую входную иину 23 подтверждения, вторую выходную разрядную шину 24 ре зультата и третью выходную шину 25 синхронизации.
Устройство работает следующим образом.
Первоначально устройство устанавливают в исходное состояние. По цифровому сигналу Разрешение (фиг.2а) поступающему по первой входной шине 21 управления на вход управления генератора 15 качающейся частоты, производится перевод устройства в режим работы. Осуществляется запуск генератора 15 качающейся частоты. На его выходах формируются опорные синхросигналы опорной частоты (фиг. 2ж), которые проходят на вход схемы 18 синхронизации, ЛЧМ-импульсные сигналы опроса (ЛЧМ - линейная частотная модуляция) частоты, которые проходят на вход преобразователя 11 напряже
10
20
25
30
35
40
45
50
55
ние - ток, установленного в корпусе магнитострикционного датчика 1 линейных перемещений, выполненного дифференциальным (фиг. 1).
Сигналы опроса возбуждают (запускают) преобразователь 11 напряжение - ток и на его выходе формируются соот- ветствуюише токовые импульсы записи, которые проходят через активную среду малоиндуктивного элемента 6 записи с магнитным ползуном 7 из магнитной жидкости и элементом 8 постоянного подмагничивания, установленного соос- но со струнным магкитострикционным ,каналом 2 передачи (магнитоводом). В результате под элементом 6 записи в зоне контакта магьмтного ползуна 7 и магнитовода возбуждаются частотные ультразвуковые импульсы механической деформации вследствие прямого магнитострик1;1;иоиного преобразования (эффект Джоуля), распространяющиеся в обе стороны со скоростью перемаг- ничивания магиитоволта.
В следующие моменты времени частотные ультразвуковые зондирующие импульсы проходят по магнитоводу под неподвижно установленными элементами 9 и 10 считывания, которые, например, могут быть выполнепы с использованием индуктивностей магии точувствительных тензочувствительных элементов, и наводят на их выходах соответствующие частотные импульсы напряженид считывания вследствие обратного м.чгнито- стрикционного преобразования (stjKjjeKT Виллари). Далее зондируюгцие ультразвуковые импульсы исгштывают полное акустическое поглощение ка акустических поглотителях 3 и 4, исключая образование в магнитоводе магнитострикционного датчика 1 линейных перемещений устройства волн отражения.
Наведенные частотные импульсы считывания с выходов первого и второго дифференциальных элементов 9 и 10 считывания проходят соответственно на входы первого и второго усилителей 12 и 13 чтения и формируют на их вьгходах цифровые ЛЧМ-им пульсы считывания (фиг. 2а-е), которые поступают на вход аналого-цифровых формирователей 16 и 17 чтения, цифрового канала 14 преобразования устройства.
По первой выходной шине 22 запроса устройства выставляется цифровой сигнал Запрос (фиг, 2б), в ответ на который через время реакции потреби515
теля информации, например мини- или микро-ЭВМ, по второй входной шине 23 подтверждения выставляется цифровой импульсньн сигнал Подтверждение (фиг. 2в). По этому сигналу производится переключение триггера 20 управления в единичное состояние, что вызывает снятие сигнала Запрос по первой выходной шине 22 запроса устройства, и разблокирование входов аналого-цифровых формирователей 16 и 17 чтения и схемы 19 синхронизации
Через аналого-цифровые формирователи 16 и 17 чтения соответственно на первый и второй информаи онные входы цифрового преобразователя 19 отношение частот в,код проходят импульсы считывания, а на. выходе схемы 18 синхронизации формируется синхроимпульс, по которому производится г1синхронный запуск цифрового преобразователя 19 отношения частот в код, выпо.чняющий измерение мгновенных частот с последугап1им вычислением цифрового кода линейного перемещения который проходит во вторую выходную разрядную uttiHy 24 результата.
В конце цикла преобразования на си 1хровьгходе цифрового преобразователя 19 отношения частот в код формируется цифровой синхросигнал Синхронизация (фиг. 2з), который проходит в третью выходную шину 25 синхронизации устройства. По этому же синхросигналу производится переключение в исходное (нулевое) состояние триггера 20 управления, что приводит к блокированию входов вторичных усилителей-формирователей 16 и 17 и схемы 18 синхронизации и выставлению сигнала Запрос по первой выходной шине 22 запроса устройства.
На этом цикл преобразования устройства заканчивается и оно подготовлено к очередному циклу преобразования, который начинается с приходом цифрового импульсного сигнала Подтверждение и выполняется без изменения.
Таким образом, при времени реакци потребителя информации t р - О использование данного подхода обработки измерительной информации перемещения делает преобразователь быстро- действуюпшм устройством, в котором
36
сит только от времени Трр выполнения преобразования частота - код и не зависит от времени Т трансляции зондирующей магнитоупругой волны через звукопровод, т.е, имеет в (1, Т,/Тр) раз более высокое быстродействие по сравнению с прототипом. При этом имеет место стабилизация времени измерения линейных перемещений Т„ Т , что способствует расширению области технического приложения устройства.
5
0
5
0
5
0
5
0
5
Формула изобретения
Дифференциальный преобразователь линейных перемещений в код, содержащий магнитострикционный канал передачи, выполненный с двумя акустически- ми поглотителями на концах и сопряженный через подвижный элемент под- магничивания, установленный соосно с магни-тострикционным каналом передачи, с выходом преобразователя напряжение - ток и сопряже1П ый с первым и вторым дифференциальными элементами считьшания, подключенными выходами соответственно через первый и второй усилители чтения к выходам первого и второго аналого-цифровых фор мровате- лей чтения, генератор опроса, подключенный первым выходам к входу преобразователя напряжение - ток и вторым выходом - к первому входу схемы синхронизагщи, отличающий- с я тем, что, с целью пoвьшJeния быстродействия измерения перемещения в него введены цифровой преобразователь отношения частот в код и триггер, а генератор опроса выполнен в виде генератора качающейся частоты, причем выходы первого и второго аналого-цифровых формирователей чтения подключены к первому и второму входам цифрового преобразователя отношения частот в код, подсоединенного третьим входом к выходу схемы синхронизации, соединенной вторым входом с соединенными между собой уп- равлянидими входами первого и второго аналого-цифровых преобразователей чтения и выходом триггера, подключенного входом к синхронизирующему выходу цифрового преобразователя отношения частот в код, выходы которого являются выходами преобразователя, а второй вход триггера является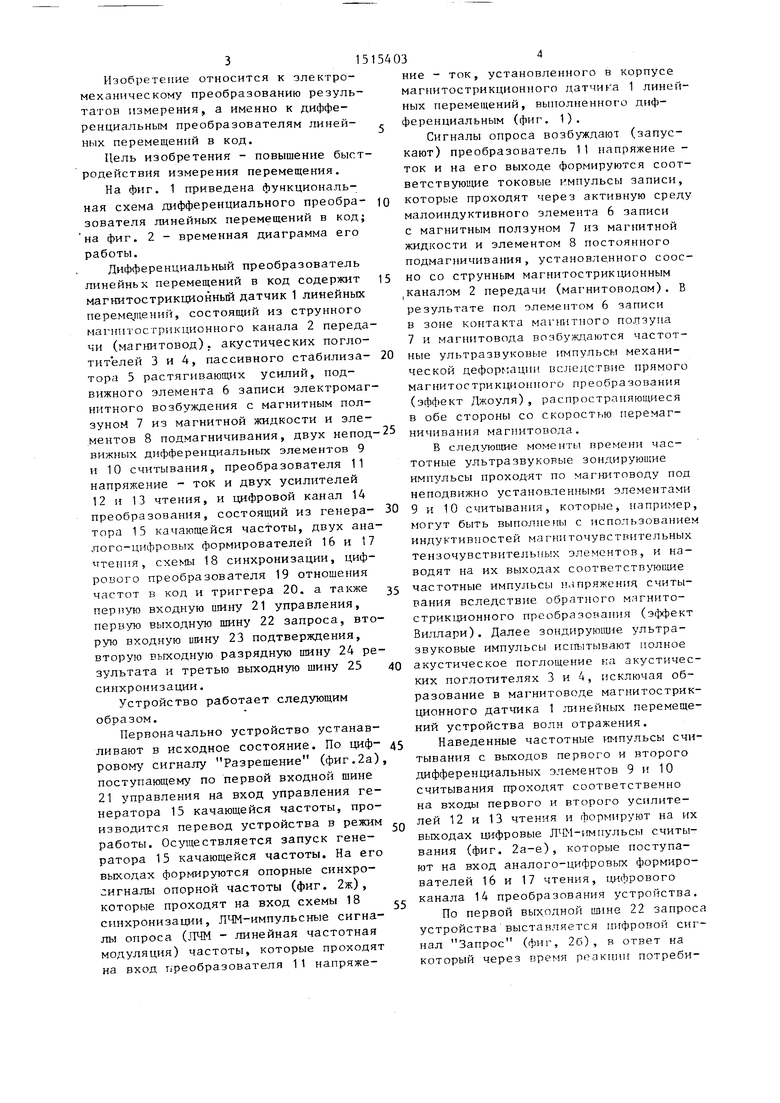
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2011294C1 |
| Преобразователь линейных перемещений (его варианты) | 1985 |
|
SU1285631A1 |
| Измерительный преобразователь линейных перемещений | 1987 |
|
SU1504507A1 |
| Ультразвуковой измерительный преобразователь скорости линейного перемещения | 1989 |
|
SU1747892A1 |
| Измерительный преобразователь линейных перемещений | 1988 |
|
SU1552002A1 |
| Измерительный преобразователь линейных перемещений | 1988 |
|
SU1589051A1 |
| Ультразвуковой измеритель перемещений | 1989 |
|
SU1619027A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2005 |
|
RU2318186C2 |
| Преобразователь скорости линейного перемещения | 1986 |
|
SU1437998A1 |
| Ультразвуковой измерительный преобразователь параметров движения | 1988 |
|
SU1613855A1 |
Изобретение относится к технике измерений и контроля линейных перемещений, а именно к магнитострикционным преобразователям линейных перемещений с логометрическим преобразованием, и позволяет повысить быстродействие измерения линейного перемещения. Это достигается вследствие использования способа преобразования, при котором выделенный интервал линейного перемещения заполняют ЛЧМ-импульсами (ЛЧМ - линейная частотная модуляция), производят синхронное измерение мгновенных частот в его крайних точках и вычисляют их разность. Преобразователь содержит магнитострикционный датчик 1 линейных перемещений, состоящий из струнного магнитострикционного канала 2 передачи, двух акустических поглотителей 3 и 4, стабилизатора 5 растягивающих усилий, элемента 6 записи электромагнитного возбуждения, двух неподвижных элементов 9 и 10 считывания, преобразователя 11 напряжение-ток, двух усилителей 12 и 13 чтения, и цифровой канал преобразования, состоящий из генератора 15 качающейся частоты, двух аналого-цифровых формирователей чтения 16 и 17, схемы 18 синхронизации, цифрового преобразователя 19 отношения частот в код и триггера 20 управления. Преобразователь предназначен для использования в скоростных роботизированных системах для контроля линейных перемещений объектов с асинхронным управлением. 2 ил.
время измерения Т„ перемещения зави- управляющим входом преобразоватгля.
(2)
д 12 в 13
W15{1 3 25
И I I И I М I I ГМ I I I М I I I I I I I I I I I I I I М I I I I II }
JT
п
п
JL
/V,, /ХР, Nji
п
JL
Фиг.2
| Магнитострикционный дифференциальный преобразователь линейных перемещений | 1977 |
|
SU668103A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Преобразователь линейных перемещений (его варианты) | 1985 |
|
SU1285631A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
