нератора 12 опроса поступает через преобразователь 9 на вход элемента 7 записи и возбуждает в магнитострик- циоином канале 2 (МК). передачи ультразвуковые волны модулирующей частоты, распространяющиеся в обе стороны от источников сообщения. Распространяясь влево, волны рассеиваются на поглотителе 4. Распространяясь вправо по МК 2, ультразвуковые волны достигают границ отражения, образованных ползуном 3 из магнит 1ой жидкости, и,
.
1 .Изобретение относится к технике изм,ерений и контроля линейных пере- ещений, а именно к магнитострикцион- ным преобразователям линейных перемещений с логометрическим преобразо- ванием, и может быть использовано в системах автоматического управления. Цель изобретения - повышение точности преобразования.
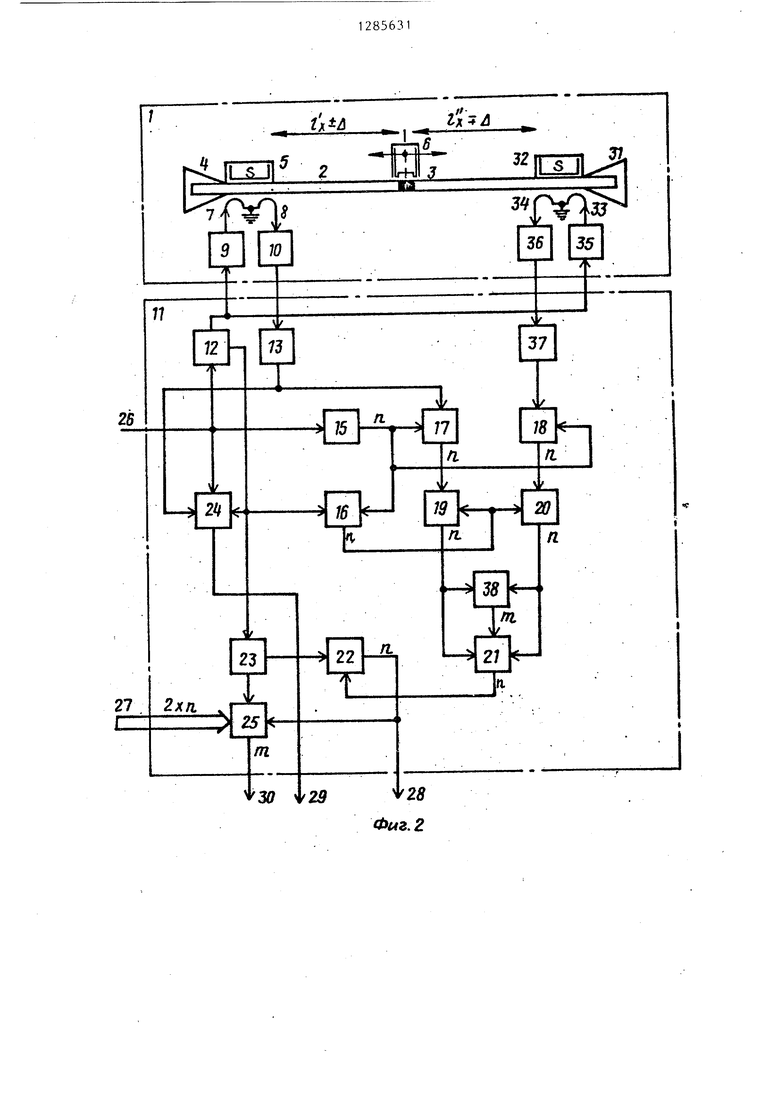
На фиг.1 и 2 приведены варианты .устройства преобразования линейны х перемещений с односторонним и дифференциальным преобразованиями; на. фиг.3 - временная диаграмма.
Преобразователь линейных перемеще НИИ (фиг.1 и 2) содержит магнито- стрикционный датчик 1 линейных перемещений, состоящий из магнитос.трик- цнонного канала 2 передачи с магнитным ползуном 3 в его рабочей полости, акустического поглотителя 4, неподвижного и подвижного элементов 5 и 6 подмагничивания, элементов 7 и 8 записи и чтения, преобразователя 9 напряжение - ток, избирательного усилителя 10 чтения, и аналого-цифровой канал 11 преобразования, состоящий из генератора 12 опроса, аналого- цифрового формирователя 13 чтения, цифрового коммутатора 14, цифрового генератора 15 взвешенных частот, первого, второго, третьего регистров 16- 18, первого и второго сумматоров 19 и 20, блока 21 вычисления результата, четвертого регистра 22, элемента 23 за- держки, блока 24, синхронизации, блока 25 контроля перемещения, первую и вторую входные шины 26 и 27 управле
отразившись, меняют направление хода, На выходах элемента 8 чтения формируются импульсы напряжения модулированной частоты вследствие обратного магнитострикционного преобразования. По ним на выходах аналого-цифрового формирователя 13 формируется сигнал синхронизации, записывающий цифровой код в регистр 17. На выходе блока 21 вычисления результата будет сформирован итоговый код результата преобразования. 1 с.п. ф-лы, 3 ил.
f5
5
Ю
, -, 35 а
25
|ния, первую выходную разрядную шину 28 данных, вторую выходную шину 29 стробирования, третью выходную разрядную шину 30 контроля перемещения. Кроме того, преобразователь (фиг.2) кроме указанных признаков содержит акустический поглотитель 31, элемент 32 подмагничивания с элементами 33 и 34 записи и чтения, преобразователь 35 .напряжение - ток, избирательный усилитель 36 чтения, цифроаналоговый формирователь 37 чтения и цифровой компаратор 38.
Устройство работает следующим образом.
В первоначальный момент устройство (фиг.1) устанавливается в исходное состояние. Перевод устройства в режим работы осуществляется lio цифровому управляющему сигналу, поступающему по первой входной шине 26 управления на вход его аналого-цифрового. канала 11 преобразования. По этому сигналу производятся разблокирование блока 24 синхронизации и запуск генератора 12 опроса и цифрового генератора 15 взвешенных частот. На п-разряд- ном выходе последнего формируется текущий цифровой код NJ, где i - число тактов преобразования, представленных опорной высокостабильной сеткой разрядных частот длительностей Т - Т, Т 2 Т , п 1,2..., где п - разрядность устройства. С выходов цифрового генератора 15 взвешенных частот текущий цифровой код Nj поступает на информационные входы первого, второго и третьего регистров 16-18 и заносит312
ся в них по импульсным цифровым сигналам синхронизации, формируемым на втором выходе генератора 12 опроса и выходах цифрового коммутатора 14 в соответствующие моменты времени теку- щего такта преобразования.
Одновременно по второй входной разрядной шине 27 управления выставляются цифровые п-разрядные коды и Nrp. г границ линейного перемещения подвижного элемента 6 подмагничивания .магнитострикционного датчика 1 линейных перемещений, имеющего .кинематическое соединение с внешним объектом контролируемого линейного переме- щения.
По импульсному цифровому сигналу синхронизации с второго выхода генератора 12 опроса производится запись текущего цифрового кода начальной фазы-преобразования в первый регистр 16, который выставлен на выходах цифрового генератора 15 взвешенных частот, а также взведен блок 24
синхронизации.
Одновременно (синхронно) на перво выходе генератора 12 опроса формируется цифровой сигнал опроса, модулированный по частоте, и поступает на вход преобразователя 9 напряжение - ток, установленного в корпусе магнитострикционного датчика 1 линейных перемещений..На его выходе формируется модулированный по частоте токовый импульс записи, поступающий на вход неподвижного элемента 7 записи. Под ним в магнитострикционном канале 2 передачи возбуждена модулированная по частоте ультразвуковая волна механической деформации, распространяю щаяся в обе стороны по магнитострик- ционному каналу передачи датчика со скоростью V,
Распространяясь влево (по фиг.1) по магнитострикционному каналу 2 пе- редачи датчика от источника сообщения, импульсная ультразвуковая волна достигает акустического поглотителя 4 и рассеивает на нем свою энергию, прекратив свое существование.
Распространяясь вправо, ультразвуковая волна проходит под непод- вижнь1м элементом 8 чтения и наводит на его вькоде модулированный по частоте импульс напряжения, который уси- ливается и демодулируется избирательным усилителем 10 чтения, уста новлен- ным в корпусе магнитострикционного датчика 1 линейных перемещений, и
5
0
5
0 5 0
5 0
5
проходит с его выхода на вход аналого-цифрового формирователя 13 чтения аналого-цифрового канала 11 преобразования устройства. На выходе аналого-цифрового формирователя 13 чтения формируется импульсный цифровой сигнал синхронизации, который проходит через цифровой коммутатор 14 на вход синхронизации второго регистра 17 и записывает в него текущий цифровой код начальной основной фазы преобразования, который выставлен в данный момент на выходах цифрового генератора 15 взвешенных частот. По этому цифровому сигналу синхронизации осуществляется асинхронный запуск блока 24 синхронизации, на выходе которого формируется импульсный цифровой сигнал стробирования, по которому производится переключение во второе состояние цифрового коммутатора 14, а также формирование на второй выходной шине 29 стробирования устройства цифрового строб-сигнала.,
Распространяясь вправо по магнитострикционному каналу 2 передачи датчика, ультразвуковая волна достигает границы отражения, образованной магнитным ползуном 3 из магнитной жидкости, расположенным в рабочей полости магнитострикционного канала передачи и удерживаемым радиальным магни- тостатическим полем подвижного элемента 6 подмагничивания, и, отразившись, изменит направление своего хода и в некоторый момент достигнет вторично неподвижного элемента 8 чтения. Прохождение ультразвуковой волны под элементом 8 чтения формирует на его выходе импульс напряжения, ко- торьй проходит через избирательный усилитель 10.чтения, демодулируется и поступает на вход аналого-цифрового формирователя 13 чтения. С его выхода импульсный цифровой сигнал синхронизации проходит через цифровой коммутатор 14 на вход синхронизации третьего регистра 18 и записывает в него текущий цифровой код конечной .основной фазы преобразования, который выставлен на выходах цифрового генератора 15 взвешенных частот в данный момент времени.
В следующий момент на п-разрядном выходе блока 21 вычисления результата формируется итоговый цифровой код результата преобразования линейного перемещения
Nx.i N;z.i /N,,) , (1) где N j i цифровой код, формируемый на выходах первого и второго сумматоров 19 и 20, который пропорционален формируемому результирующему временному интервалу линейного перемещения
ТкЛ Tg.., /Т..| , где Ii Zo/V;
Tj.i 2,/V;
зоны логометрического и oc- НОВНОГО преобразования. Этот цифровой код Ny переписывается в четвертый регистр 22 по импульсному цифровому сигналу синхронизации генератора 12 опроса, задержанному по первому выходу элемента 23 задержки. С его п-разрядного выхода цифровой код итогового преобразования поступает на первую выходную разрядную шину 28 Данных устройства и одновременно заносится в блок 25 контроля перемещения по импульсному цифровому сигналу синхронизации, задержанному по второму выходу элемента 23 задержки. В блоке 25 выполняется анализ текущего цифрового кода N.H результата относительно заданных границ линейного перемещения, заданных цифровыми кодами J и Nrp.2 В результате данного анализа на его т-разрядном выходе формируется цифро- вой код Ncq.i состояния положения (перемещения) , который поступает на третью, выходную разрядную шину 30 контроля перемещения устройства.
На этом текущий цикл преобразования заканчивается, и устройство подготовлено к следующему циклу преобразования, который начинается с момента формирования импульсного цифро
вого сигнала синхронизации на втором; 45 зованных магнитным ползуном 3 из магнитной жидкости, расположенным в зо расположения подвижного элемента 6 подмагничивания, имеющего кинематическое соединение с внешним объектом 50 контролируемого линейного перемещевыходе генератора опроса устройства и выполняется без изменения в соответствии с формулой (1).
Использование в преобразователе магнитострикционного канала передачи с магнитным ползуном из магнитной ,жидкости и использование внутриим- пульсной модуляции позволяет повысить To iHocTb преобразования линейного перемещения в код путем повышения его помехоустойчивости и умень- где Л-смещение от центра зоны (+
ния, и, отразившись от границы отражения, изменяют направление своего
хода.
В моменты времени
.
5 2(«;±Л)/У и Tj.i 2(#,+ 4)/V,
+ 1,,) линейного перемещения, на выходах первого и второго элеменшения неоднородно9,ти границы отражения относительно известного преобра035
зователя. А использование бесконтактного способа преобразования линейного перемещения позволяет повы- . сить его надежность путем увеличения 5 срока эксплуатации по сравнению с известным преобразователем.
В преобразователе линейных перемещений .(фиг.1) имеет место взаимосвязь направления перемещения и ито- O гового результата преобразования.
Устранить отмеченную зависимость позволяет представленный преобразователь линейных перемещений, магнито- стрикционный датчик которого выпол- 5 нен по дифференциальной схеме (фиг.2).
Преобразователь линейных перемещений по дифференциальной схеме работает следующим образом.
Модулированный по частоте импульсный цифровой сигнал опроса по первому.вьосоду генератора 12 опроса поступает через первый и второй преобразо
ватели 9 и 35- напряжение - ток, установленные в корпусе магнитострик- ционного датчика 1. линейных перемещений, на входы первого и второго элементов 7 и, 33 записи и возбуждают в магнитострикционном канале 2 пере- дачи ультразвуковые волны модулирующей частоты, распространяющиеся в обе стороны от источников сообщения по магнитострикционному каналу со скоростью V.
Распространяясь влево и вправо по магнитострикционному каналу 2 передачи, ультразвуковые волны испытывают полное поглощение на акустических поглотителях 4 и 31.
Одновременно, распространяясь вправо и влево по магнитострикционному каналу 2 передачи датчика 1 от источников сообщений, ультразвуковые вол , ны достигают границ отражения, обра
нитной жидкости, расположенным в зоне расположения подвижного элемента 6 подмагничивания, имеющего кинематическое соединение с внешним объектом контролируемого линейного перемещегде Л-смещение от центра зоны (+
где Л-смещение от центра зоны (+
ния, и, отразившись от границы отражения, изменяют направление своего
где Л-смещение от центра зоны (+
хода.
В моменты времени
.
2(«;±Л)/У и Tj.i 2(#,+ 4)/V,
где Л-смещение от центра зоны (+
+ 1,,) линейного перемещения, на выходах первого и второго элемен712
тов 8 и 34 чтения формируются импульсы напряжения модулированной частоты вследствие обратного магнитострикцио ного преобразования.
По этим импульсам напряжения чте- ния на выходах первого и второго аналого-цифровых формирователей 13 и 37 чтения формируются импульсные цифровые сигналы синхронизации, по которы производится запись текущих цифровых кодов дифференциального преобразования во второй и третий регистры 17 и 18. В первом регистре 16 хранится текущий цифровой код начальной фазы преобразования, записанный в него по импульсному цифровому сигналу синхронизации по второму выходу генератора 12 опроса.
Ка п-разрядном выходе блока 21 вычисления результата формируется ито- говый цифровой код результата преобразования линейного перемещения
N
V.i
I N.j /Nj.il
Далее весь процесс преобразования полностью совпадает с описанным процессом преобразования для преобразователя линейных перемещений по фиг.1.
Формула изобретения
1. Преобразователь линейных перемещений, содержащий магнитострикцион- ный датчик линейных перемещений., состоящий из Магнитострикционного канала передачи, на котором установлены акустический поглотитель .и элементы записи и чтения с элементами подмаг- ничивания, отличающийся тем, что, с целью повышения точности преобразования, магнитострикционный датчик линейных перемещений выполнен в виде трубчатого магнитострйкционно- го канала передачи, подвижного эле-, мента подмагничивания, установленного соосно с магнитострикционным каналом передачи, магнитного ползуна из магнитной жидкости, расположенного в -полости трубчатого канала передачи, преобразователи напряжение - ток, избирательного усилителя, а преобразователь линейных перемещений снабжен аналого-цифровым каналом преобразования, состоящим из генератора, опроса : аналого-цифрового формирователя чтения, |Цифрового коммутатора, цифрового. генераа 6ра взвешенных частот, парно-, го, второго, третьего и четвертого регистров, первого и второго сумматоров, элемента
блока вычисления результата,
задержки, блока синхрониза-
5 JO 15
20
25
40
50
ции и блока контроля перемещения, причем выход избирательного усилителя чтения Магнитострикционного датчика линейных перемещений соединен с входом аналого-цифрового формирователя чтения аналого-цифрового канала преобразования, выход которого соединен с входом цифрового коммутатора, первый выход которого соединен с входом синхронизации второго регистра и с третьим входом блока синхронизации, а его второй выход соединен с входом синхронизации третьего регистра, информационные входы которого соединены с выходами цифрового генератора взвещенных частот и с информационными входами первого и второго регистров, выходы второго и третьего регистров соединены с Первыми входами первого и второго сумматоров, вторые входы которых соединены с выходами первого регистра, выходы-первого и второго сумматоров соединены с первыми и вторыми входами блока вычисления результата, его выходы соединены с информационными входами четвертого регистра,, вход синхронизации которого соединен с первым выходом элемента задержки, а его выходы соединены с первой выходной разрядной шиной данных и с первыми информационными входами блока контроля перемещения, у
35 которого вторая группа информационных входов соединена с второй входной разрядной шиной управления, выходы соединены с третьей выходной разрядной щнной контроля перемещения, а его вход синхронизации соединен с вторым входом элемента задержки, первый вход которого соединен с входом - синхронизации первого регистра, с вторым входом блока синхронизации и вторым выходом генератора опроса, при этом его первый выход соединен с входом преобразователя напряжение - ток Магнитострикционного датчика линейных перемещений, соединенного с элементом записи, а его вход управления соединен с первой входной шиной управления, с входом управления цифрового генератора взвешенных частот и с входом управления блока синхро55 низации, выход которого соединен с входом управления цифрового коммутатора и с второй выходной шиной стро- бирования преобразователя линейных перемещений.
45
9 . 1
2. Преобразователь линейных перемещений, содержащий магнитострикцион пый датчик линейных перемещений, сое тоящий из магнитострикционного канала передачи, на котором установлены акустический поглотитель и элементы записи и чтения с элементами подмаг- ничивания, отличающийся тем, что, с целью увеличения точности, магнитострикционный датчик линей нык перемещений выполнен в виде труб чатого магнитострикдионного канала передачи с двумя акустическими погло тителями на концах, двух неподвижных и одного подвижного элементов подмагничивания с элементами записи и чтения, установленных соосно с магнитострикционным каналом передачи, магнитного ползуна из магнитной жидкости, расположенного в полости трубчатого канала передачи, двух преобразователей напряжение - ток, двух избирательных усилителей чтения а преобразователь линейньпс перемещений также снабжен аналого-цифровым каналом преобразования, состоящим из генератора опроса, первого и второго аналого-цифровых формирователей чтения, цифрового генератора взвешенных частот, первого, второго, третьего и четвертого регистров, первого и второго сумматоров, блока вычисления результата, элемента задержки, блока синхронизации, блока контроля перемещения, цифрового компаратора, прк- чем выход первого избирательного усилителя чтения магнитострикционного датчика линейных перемещений соединен с входом первого аналого-цифрового формирователя чтения, а выход избирательного усилителя соединен с входом второго аналого-цифрового формирователя чтения, первый вход, генератора опроса соединен с входами первого и второго преобразователей напряжение - ток, выход пер10
20
8563110
вого аналого-цифрового формирователя чтения соединен с вторым регистром и блоком синхронизации, а выход второго аналого-цифрового форми5 рователя чтения соединен с третьим регистром, информационные выходы третьего регистра соединены с выходами цифрового генератора взвещенных частот и с информационными входами первого и второго регистров, выходы второго и третьего регистров соединены с первыми входами первого и второго сумматоров, вторые входы которых соединены с выходами первого регис 5 тра, выходы первого и второго сумматоров соединены с первыми и вторыми входами блока вычисления результата и входами цифрового компаратора, который подсоединен.выходом к блоку вычисления результата, выходы которого соединены с информационными входами четвертого регистра,:: вход синхронизации которого соединен с
первым выходом элемента задержки, а его выходы соединены с первой выходной разрядной шиной данных и с первыми информационными входами блока контроля перемещения, у которого вторая группа информационных входов соединена с второй входной разрядной шиной управления, вьпсоды соединены с третьей выходной разрядной шиной . контроля перемещения,а его выход синхронизации соединен с вторым входом
35 элемента задержки, вход которого соединен с входом синхронизации первого регистра, с вторым входом блока синхронизации и вторым выходом генератора опроса, при этом его вход управ40 ления соединен с первой входной шиной управления, с входом управления хщфрового генератора взвешенных частот и с входом управления блока синхронизации, выход кото30
45
рого соед:инен с второй шиной стробирования.
Й S
fo
к
Составитель М.Абросимов Редактор Н.Рогулич Техред Л.йе)дюкова Корректор С.Шекмар
Заказ 7513/59 Тираж 637Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35., Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Дифференциальный преобразователь линейных перемещений в код | 1986 |
|
SU1515403A1 |
| Измерительный преобразователь линейных перемещений | 1987 |
|
SU1504507A1 |
| Ультразвуковой измеритель перемещений | 1989 |
|
SU1620834A1 |
| Ультразвуковой измеритель линейных перемещений | 1989 |
|
SU1645812A1 |
| Преобразователь скорости линейного перемещения | 1986 |
|
SU1437998A1 |
| Ультразвуковой измеритель параметров движения | 1988 |
|
SU1534308A1 |
| Преобразователь линейных перемещений | 1985 |
|
SU1394033A1 |
| Измерительный преобразователь линейных перемещений | 1988 |
|
SU1589051A1 |
| Ультразвуковой измеритель перемещений | 1989 |
|
SU1619027A1 |
| Преобразователь линейного перемещения в код | 1984 |
|
SU1274156A1 |

Изобретение относится jc магни- тострикционным преобразователям линейных перемещений с логометрическим преобразованием. Цель изобретения - повьшение точности преобразования. Модулированный по частоте импульсный цифровой сигнал опроса по выходу ге 30 (Л с ISD 00 ел о 00 J
| Магнитострикционный дифференциальный преобразователь линейных перемещений | 1977 |
|
SU668103A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Магнитострикционный датчик перемещений | 1975 |
|
SU551806A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
