ел
Од О)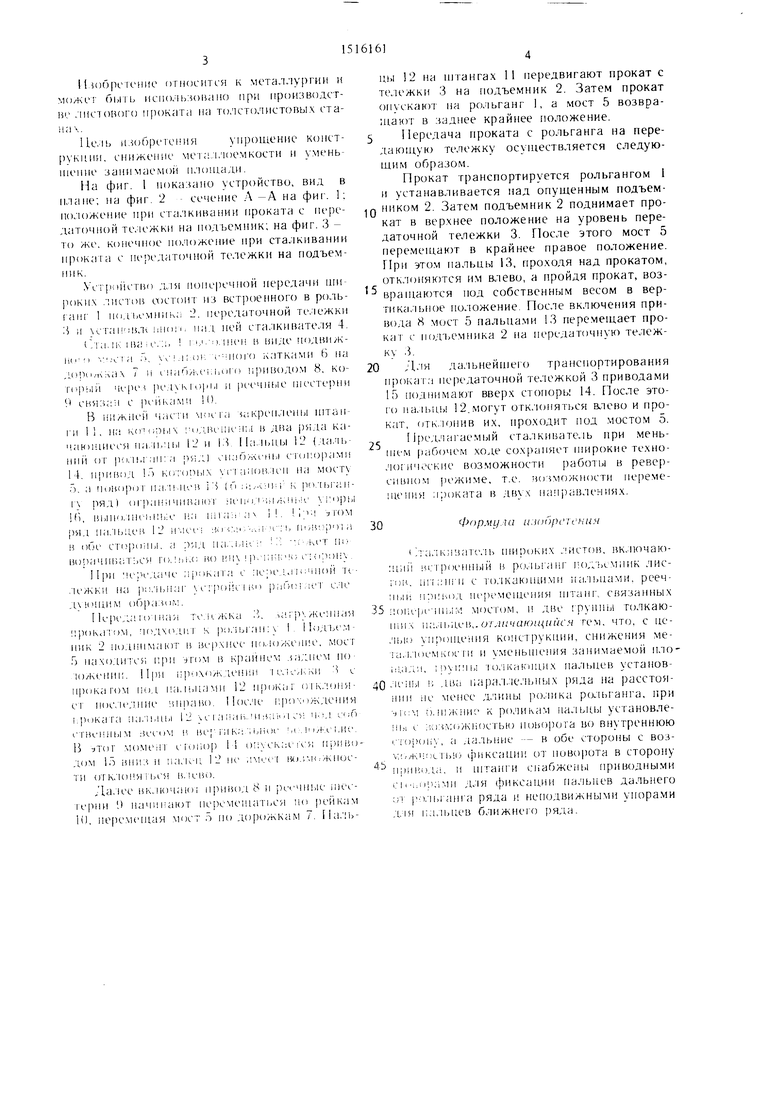
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ ОБРАБОТКИ ДРОББЮ | 1971 |
|
SU306952A1 |
| Устройство для укладки изделий в пакет | 1987 |
|
SU1518131A1 |
| Поточная линия для раскроя проката | 1976 |
|
SU683903A1 |
| Устройство для сборки-разборки узлов машин | 1986 |
|
SU1371838A1 |
| Генератор качающейся частоты с цифровым управлением | 1978 |
|
SU855936A1 |
| Установка для укладки керамических изделий на печную вагонетку | 1977 |
|
SU742145A1 |
| Гибкая производственная система | 1988 |
|
SU1586895A1 |
| Линия термической резки листов | 1987 |
|
SU1518094A1 |
| Транспортер-укладчик | 1953 |
|
SU105652A1 |
| Судоподъемное сооружение для пересадки судов с воды на берег при помощи балластирующегося понтона | 1957 |
|
SU109957A1 |
Изобретение относится к металлургии и может быть использовано при производстве листового проката на толстолистовых станах. Цель изобретения - упрощение конструкции, снижение металлоемкости и уменьшение занимаемой площади. Поставленная цель достигается тем, что на штангах 11 толкающие пальцы 12 и 13 установлены в два параллельных ряда на расстоянии, не меньшем длины ролика рольганга 1. Пальцы 12 снабжены приводными стопорами 14 для перемещения проката с тележки 3 на подъемный стол 2. При перемещении тележки с прокатом к рольгангу и от рольганга стопоры 14 подняты. Перемещение металла с подъемного стола на тележку осуществляется пальцами 13, имеющими возможность отклоняться лишь в одну сторону (от рольганга). 3 ил.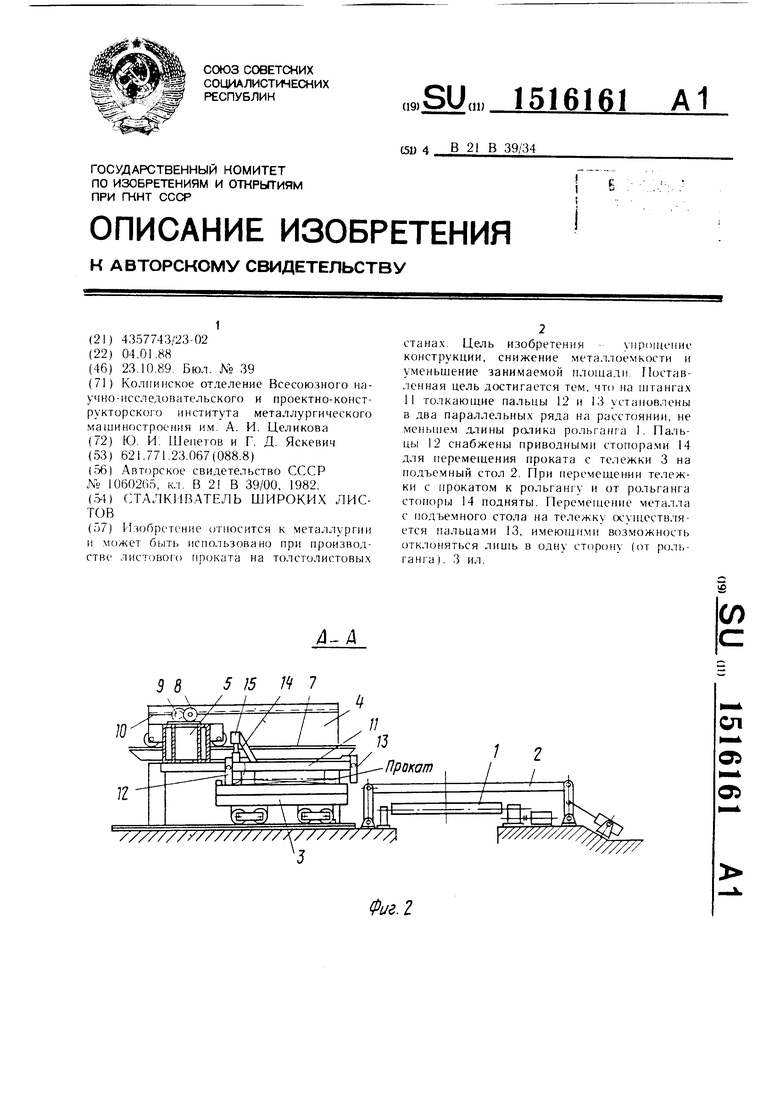
ие.2
11 ioopoTCHMO относится к метал.1у)гии и мо/кег б|,1ть Mciio. ihiioiiaiio при производстве .тисювого проката на то.чстолистовых стала ч.
Hc.ib изобрсмеиия упрощение копст- рукппи, спижепис метал.тоемкости и умепь- inonno заиимаемой площади.
На фиг. 1 показано устройство, вид в плапе; па фиг, 2 сечение Л -А на фиг. 1; положение при сталкивании проката с передаточной те.тежкн на подъемник; на фиг. 3 - то же. копечпое положение при ста;1кивании проката с передаточной тележки на подъем- нпк.
Усгрпйство для понеречн(п 1 нередачи инь роких .тистои а)стоит из BCTpoesiHoro в роль- 1 lui.iiA MHnK i 2. передаточной те.тежки :i и ст ап |ИЛ( iiiioi 1; над пей сталки ателя 4,
Г/галк I ва i I..;;. i ... лпеп ii виде иодвпук- ii(i ) -.- jcia Г, v Li:{)i . г пюго катками 6 на до Чч/пках 7 н )/i-a i:i,oi i) приводом 8, ко- I C pbiii 4cpef редхкюры ii ,1е niecTepiiH 9 связан с рейками И).
В нижней части M;icr;i закреп;1епы штанги 11, па к((,| ; 1 i;uu inc;i;,i и два ряда качающиеся na.Ti.iiiii 12 и l. i Пальпы 12 (да.чь- iini i от р(1,т|,гап:а ряд спаожспы сти1 .о|)амп 14. Г) K(,X -с-| aiioB,:ien па мосту ). а поворо палм1 ,м1 i Ч (о ;,i,..v n:i ч ро.ты ап- г ряд) ограии чпвают iicnii, ; /Kiii.ic i:opi, И), выполпс | П1,;с па пи а . l; i э I OM яд iia. iijUen 12 имсч-; v,;i ..ат : i, П,)) а и обс CTopoin,, а ряд па/.мк м-кст IID спл ,.; ко IMI i p, i;i:n i; с ; (i:i;)n .
Ilpn чс ;ч даче а|1)ката с :ic;uv,i i (:4noii тележки па р:;Л1 паг с :-р() i;n janiM : icT слс д lonuiM образом.
11и|Н да u4 паи Tc.ii./кка .,. -.а.грх Ж1 ;1П 1Я 1роКсГГ1)М, чпдхо. к рм.чы ап: I Подтд м- пик 2 по.И пмают в исрхпее положеим.е, мост Г) нахо.чится чгом в крайнем .(адпсм по юженпп. 1ри мрохож;ичп И -iivicasKn с прокатом под пальцами 12 п шкаг (лк. юпя- сг пос. и лппе мправо. После прохо/кдепия i.poKara па. ||,П1,1 12 с i а liaii, MI заь л ся n.i ссб ствс1 1п.1м )М I вс;л и ка i i.Tioe м л /гс i,iie.
В эТОГ MOMtMn ClOiiOp 11 О ; СК;:еГСЯ IliilliiOдом io ипиз п 12 пе ,1мее .r,i( a-KntJC- ти от к.том.я П)СЯ в, 1ево.
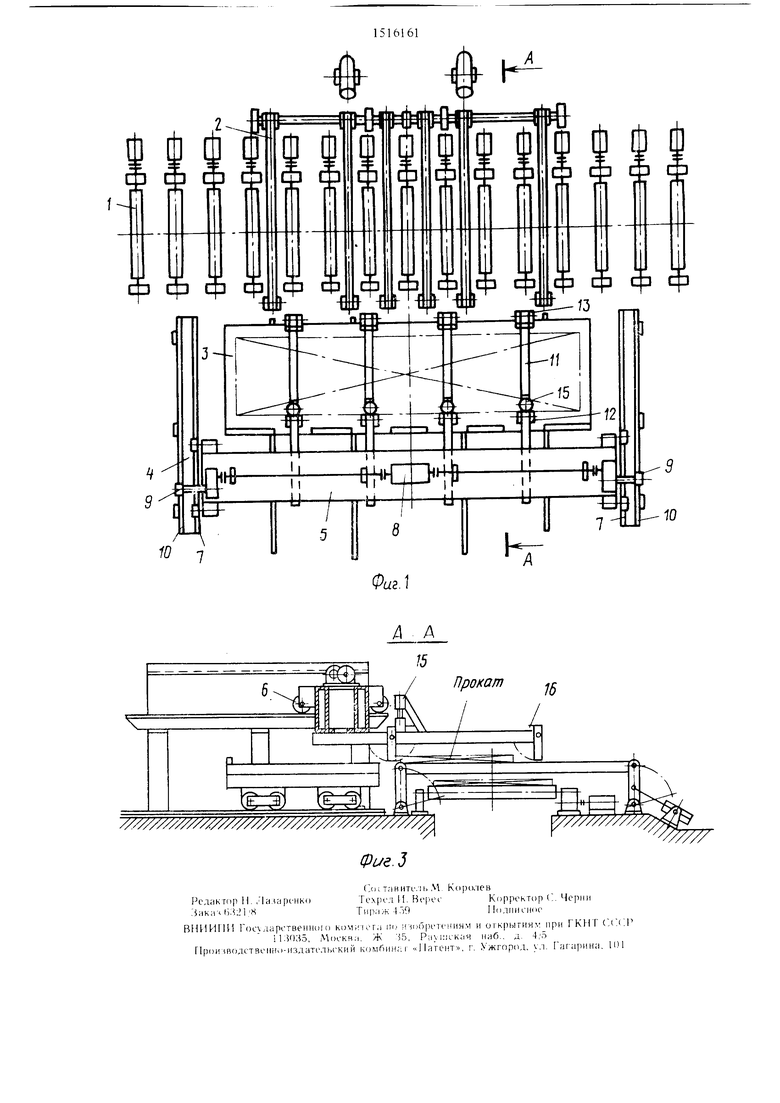
Далее включаю: привод 8 и i)ec4in,ie inec- гсрни 1) пачипак т пе1)оме1пат ься гю leiiKaM И), пе|)ем(Ч1и1Я моет о по до)ожкам 7, Па. 12 на нггангах 11 передвигают прокат с тележки 3 на подъемник 2. Затем прокат опускают па рольганг 1, а мост 5 возвращают в заднее крайнее положение. Передача нроката с рольганга на передающую тележку осуществляется следующим образом.
Прокат транспортируется рольгангом 1 и устанавливается над опущенным подъемНИКОМ 2. Затем подъемник 2 поднимает прокат в вер.хнее положение на уровень передаточной тележки 3. После этого мост 5 перемещают в крайнее правое положение. При это.м пальцы 13, про.ходя над прокатом, отклоняются им влево, а пройдя прокат, возвращаются иод собственн1)м весом в вертикальное положение. После включерщя привода 8 мост 5 пальцами 13 перемещает прокат с подт.емника 2 на передаточпую тележку 3.
;1ля дальнейн е1о транспортирования прокага передаточной те.тежкой 3 приводами 1Г) (юдппмают вверх стопоры 14. После это- гч) пальцы 12..могут отк.мопяться атево и прокат, отк.чопив их, проходит под мостом 5. 11 едлагаем|)|й сталкщ5атель нри меньшем рабочем ходе сохраняет широкие технологические воз.можности )абочы в ревер- спвпом |)ежиме, т.е. возможности пе 1еме- nieiinH а;)оката в двух паправлеииях.
30
Формула 11: ипр1 тс1-тя
(.талкп зат ель пироких .листов, нключаю- uiHii я:тре1еппый в р(.1Льгаиг по;; г ем11пк лис- i Di ., иГ ;л1|Ч1 с чч)лкак)щи.1п ца.чьпами, рееч- п,п п:)1мм)д пе)емещепия штапг, связанных
.35 ioiii.-|ie ini,i;v; .мосчч.)м, и две группы толкаю- iiinx пальцев,. o,. i(. ua/oij(;( /r,4 тем, что, с це- .Ч1Л: упрощеипя конструкции, снижения ме- ал.че1СМ ч()с ги и у еньщепия занимаемой пло- .a;;n, liiviiiibi i o:ii aiMHUix пальцев установ40 ле.11;| ; два 11арал..челы1ых ряда на расстоя- нпп не менее длины po;iiiKa рсхчьгапга, при -) .:.1мжпие к роликам иальц установле- п.-1 с :;;)змо киостью поворота во внутреннюю e i()1), а дальние -- в обе стороны с воз- )1.1 ijiHKCanni от ново|юта в сторону
- ,1)Да, п штанги спабже п. приводными i;11-lajiKiMn для фиксацип пальцев дальнего ;;т | :хчы ап1 а ряда н непсхчвижными упорами д.чя п:1Л1)Цев ближнего ряда.
У у Ш
сЬ сЬ
/
// У//7///////////////,
Фиг.д
10
/1 Д
16
| Сталкиватель слябов | 1982 |
|
SU1060265A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
