21 20
СП
о
ю
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционный листоштамповочный пресс-автомат | 1987 |
|
SU1516196A1 |
| Автомат для изготовления деталей из проволоки | 1986 |
|
SU1395408A1 |
| Штамп для вытяжки деталей оживальной формы | 1988 |
|
SU1519813A1 |
| Штамп с отключаемыми пуансонами | 1987 |
|
SU1609536A1 |
| Машина для гидропластической обработки трубчатых изделий | 1983 |
|
SU1335484A1 |
| Устройство для подачи материала в зону обработки | 1986 |
|
SU1494994A1 |
| Устройство для гибки и обрезки | 1982 |
|
SU1109230A1 |
| Устройство для подачи штучных заготовок в рабочую зону пресса | 1989 |
|
SU1706764A1 |
| Грейферный механизм подачи к штампу для вязки крючковых цепей | 1980 |
|
SU984585A1 |
| Штамп для обрезки полых деталей по высоте | 1986 |
|
SU1344528A1 |
Изобретение относится к обработке металлов давлением и может быть использовано при автоматизированной гибке деталей типа кожухов. Цель изобретения - повышение производительности при автоматизированной гибке деталей высотой большей, чем закрытая высота пресса. Устройство состоит из матриц для предварительной и окончательной гибки, последовательно установленных на столе 8 пресса, и пуансонов 8, закрепленных на консольных участках траверсы 5, смонтированной на ползуне 6 пресса. Заготовка 2 подается из накопителя 1 на подъемный стол 3 манипулятором 4. Затем при движении линеек грейферного механизма влево происходит подача заготовок на участки предварительной и окончательной гибки, а также удаление изготовленной детали. Для обеспечения беспрепятственного возвратного хода линеек поворотные собачки, установленные на линейках, утапливаются. Съем деталей с пуансонов осуществляется съемниками 22 и толкателями 19. 12 ил.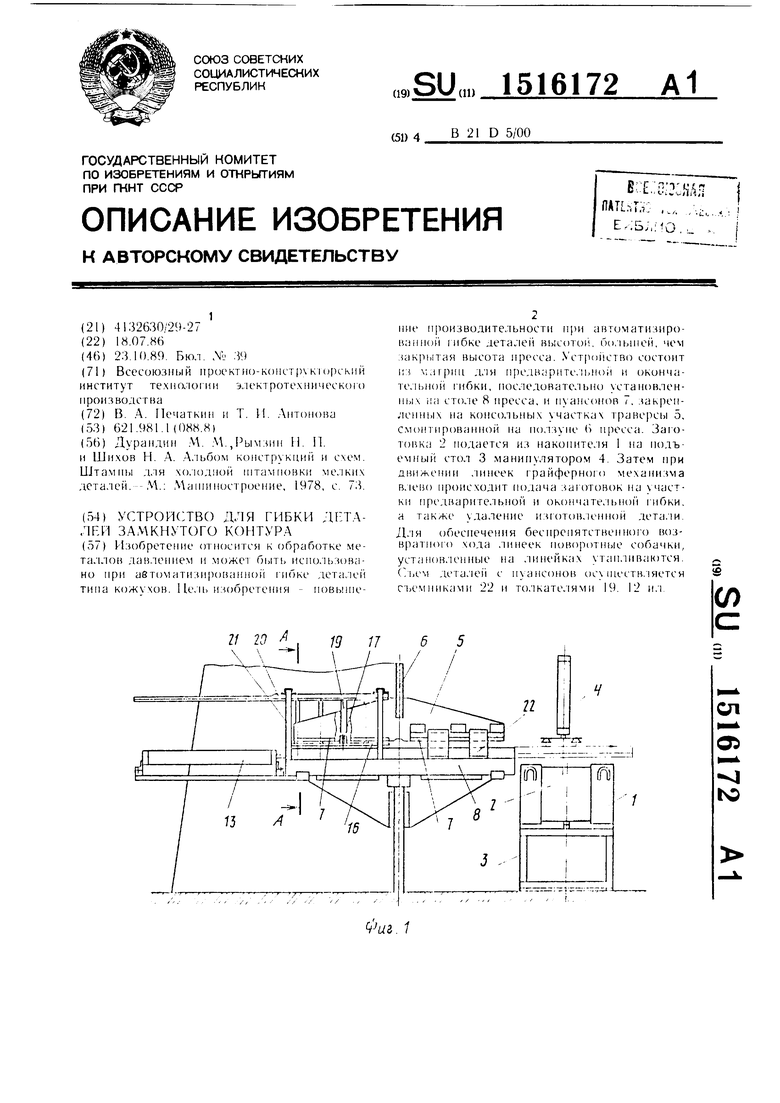
Фи&. 1
И:5()Г)рстеи11е относится к обработке мс- ;а.1.1ои ;uiB, iLMnfe i и может быть ()льзовг)110при ;iiiT(iM;iTHHHp()ia iHoii гибко детале11 типа К()ж ()в .i. iH хо.и)ди,1ьиика, ирямоуг оль ныл во i.i x(jH();ioii.
Ue.ib и:(об)етения иовыиюиие 1роиз- водитсмыюсти при автоматизированиой гиб- ке ил 1итучны ;i;ii4)T()BOK деталей libicoToii, бо.тыией, чем закрытая высота пресса.
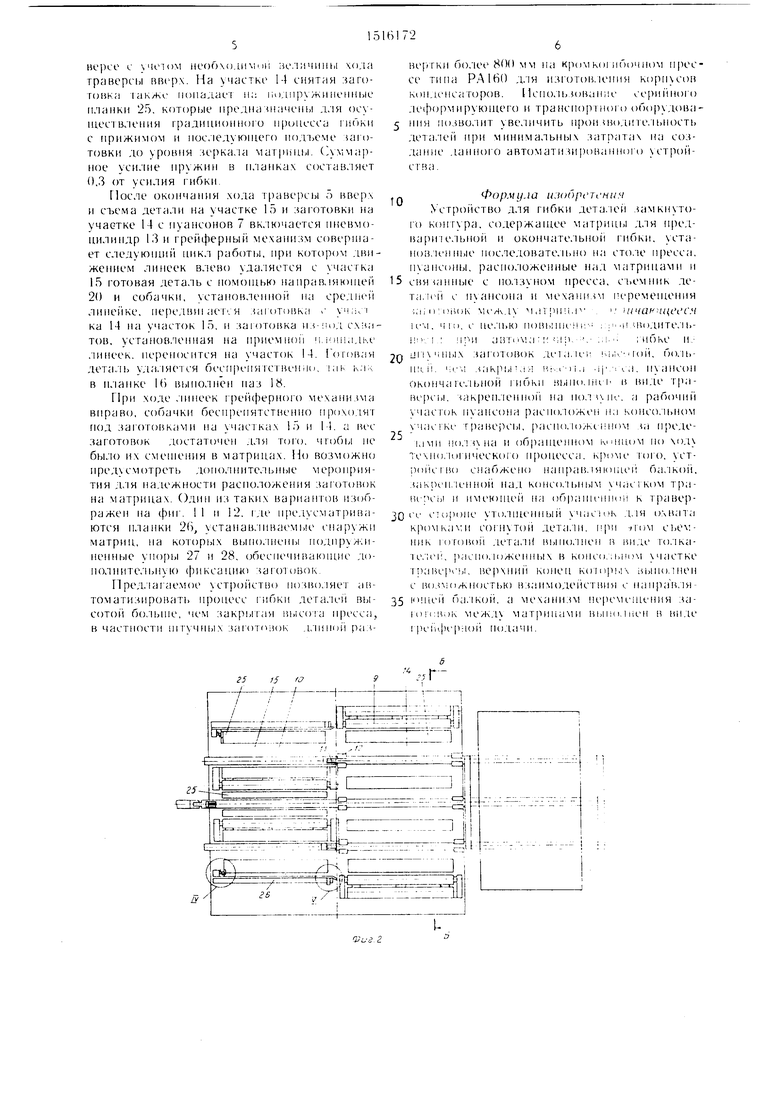
ila (|)иг. 1 иоказаио устройство, обиип) И1д; иа (()И1 . 2го же, вид сверху; на
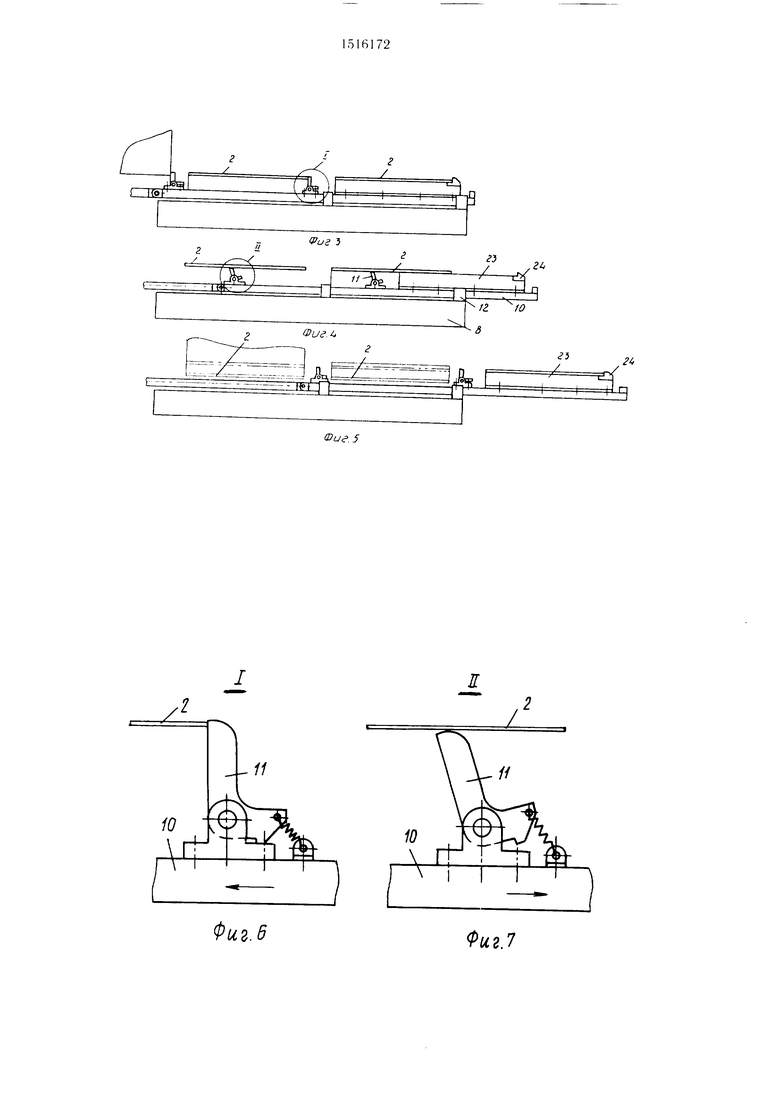
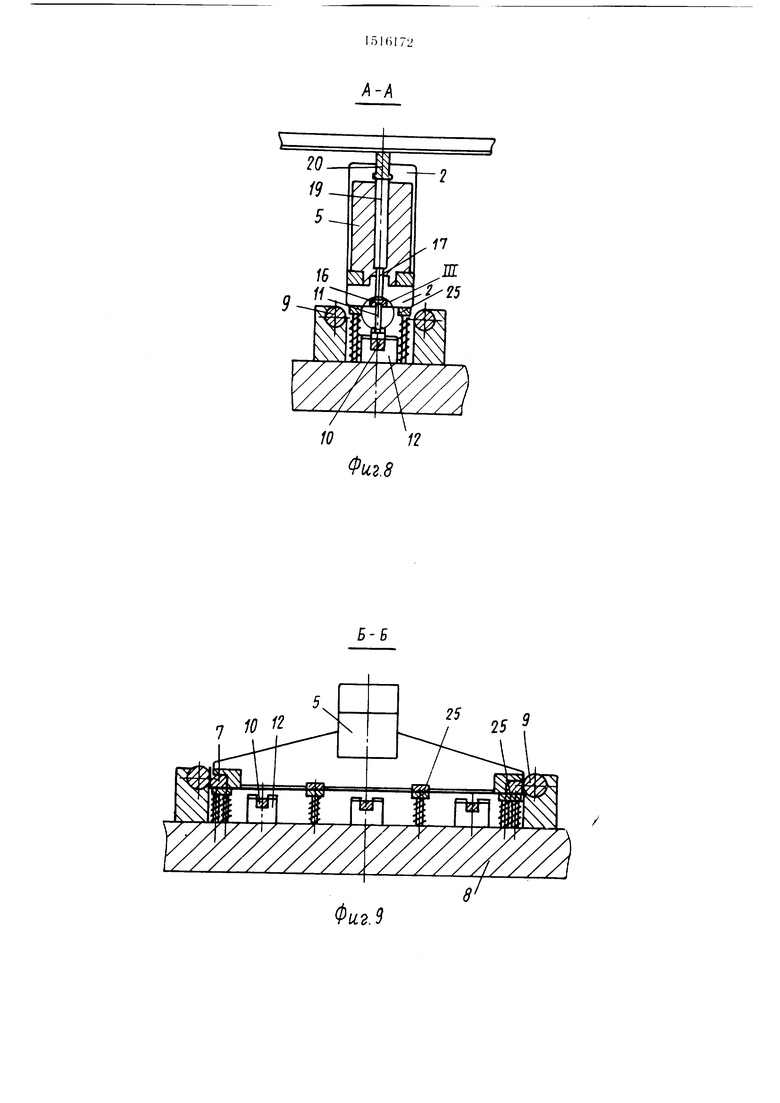
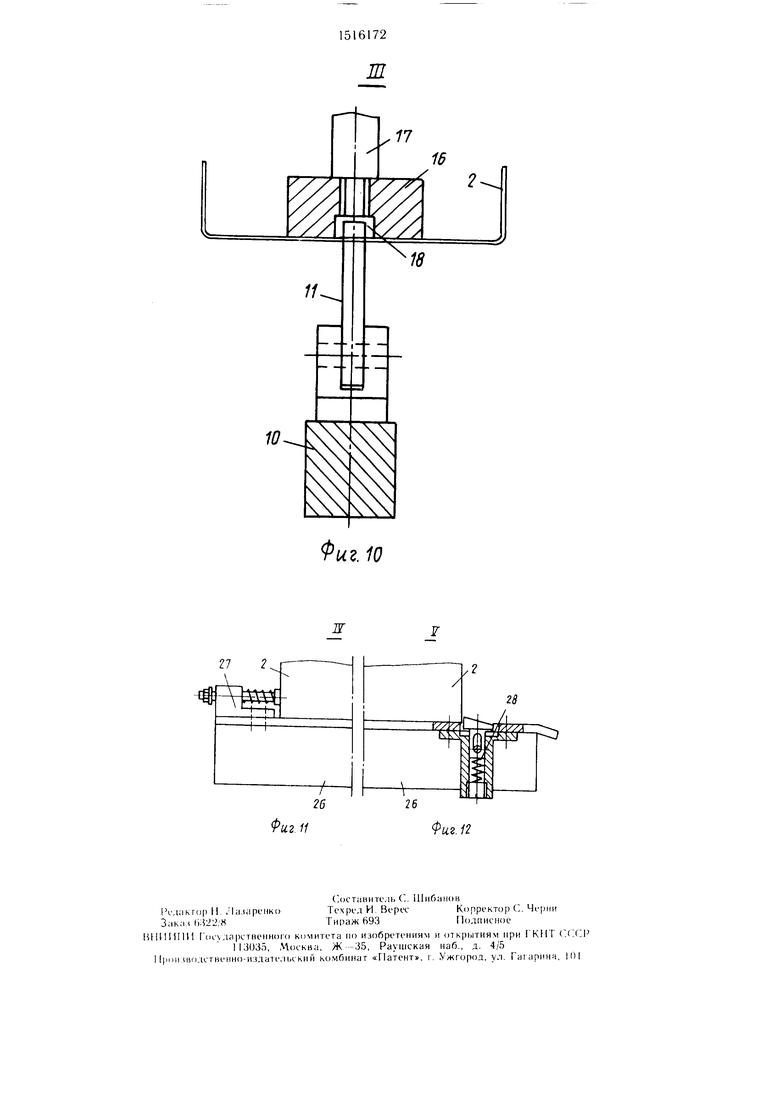
фп|. } 1 рей(}1е|1пы11 механизм, собачки в к)айием . icBOM ио.южеиии; на фиг. 4 - то же. ири выходе линеек с собачками из-под заготовок: иа (})иг. 5 - то же, в момент I ибки и приема заг отовки из-под схватов 1апипу.1ятора; па фиг. 6 узе.т I на (})иг . 3 (рабочее по.южепие собачки при иродви- /Ki inin з, П 1)1 онки); па (пи. 7 - у ел 11 па . 1 ixo.iDCToe 11о;|ожеиие собачки при iipoxu.ic ичд заготовками); па фиг. 8 разрез .Л .Л иа фи1. I (ве)хпее положение ио.1- в мслимп сьема за1 ог()вки); иа (|)И1 . 9 разрез 1) ) па ifnii . 2; па (()иг. К) узе:1
111иа фи1. S; па фиг. I 1 узел IV M;I i|utr. 2; па фи1. 12 узел V на ||)иг. 2.
Ni TpoiiciBo состоит из мехапизмн по- )П 1и |дач11 заготовок, в coc iais кого- о() входит иакопите.и. 1 с заг отовками 2, ус1 апов. 1еппый на под ьемиом сто.те 3, и 1ииииу.1я го() 4 д.тя подачи заготовок; траверсы Г, прик кчг:1енной к ио, 1зуну кромког ибоч iioin иресса (i с пуансонами 7 д, 1я 1 ибки; cio.ia 8, на когором закренлегН) ро.чиковые мат)ины .I г()е| |(()ерио1 О .мехаиизма с .чиней- И и собачками 11, распо, 1оже1П1ыми в
ур.ор 24. ооразующие приемные идо2:
щадки.
Иа сюле 8 устаиов.тены иодпру/кипен1н,1е п,:аг1ки 2Г), которые находятся на уровне .к р- кала Maiрипы.
Для бо.кч ТОЧНОЙ) расположении laioTo- нок о inncn i 1.м|,П1) матриц нре.(п jienbi
наира 1.1як)1ннх 12. , 1иие11ки реЙ1|)ерног() мехаиизма И1арпирпо соедииеиы со niTOKOM си,1о15о1ч пл1.1индра Л. Сто. 8 имеет участок 1-1 для иредварите. ПиЮЙ и участок 15 для пкопчател1 П(И1 1 пбки заготовок.
Над учас 1К1)м I . расположеп u xanii3 i 11.ема .ималей с иодп)у жпиенно ; огпоси- те. траверсы n.iaHKoii If), Н)икреп.теи- noii к TpaBi pce Г) ступенчатыми винтами 17 и уrairHiiiaeMDii в наз 18 траверс1 1. To/iKa- Te.iii И рас1 оложеп1)1 в траве|1се с 1озм )Ж- пост1)К) взанмодейсгвия со стуиенч атымп винтами 17 и па11)авлякмней 20.
Направ. 1Я1)1цая 20 крепится к рамам 21, ч 1 аповленкым fia сто.те 8. Вдоль ччасгка 14 расп).1ож1 ны жес1 кие ст емннки 22 д.чя cijCM.i загоговки па участке предвари ге. п.иой 1и6ки 14 с граиерсы 5 ири iio, пресса t).
Па всех .nnieiiKax 10 закреплены н.ганки
5 г
планки 26, установдеппые сиаружи .матриц, на которых выполнены ноднружиненные упоры 27 и 28.
Перед началом работы манипулятор 4 и Tpaiiepea 5 па.ходятея в ве1ххнем положении, 1 рейфе)ные линейки 10 вдвинуты.
Схват манипулятора 4 в ис.ходной позиции в()|дачи заготовки должен раснолагаться над зе1)калом роликовых матриц 9 и соос- но матрицам.
Комплекс работает следующим образом.
Схват манипулятора 4 опускается вниз, захват1,п}ает заготовку 2 из накопителя I и ноднимает ее над зеркалом роликовых .матриц 9. При движении линеек влево заготовка из-под схватов попадает на участок 4 за счет движения самих линеек, а заготовка, паходяп1аяся па участке 14, с помощью собачек, усгаповлепных либо иа все.х трех ли- пейках, либо па крайпих, либо на среднеГк 0 перемеп1ается на матрицы участка 15, так как зеркала матриц находятся на одном уровне, а расстчпжие между матрица.мн значн- ге.тьпо меп1,п1е щирии ; заготовки. Расстоя- inie между собачками вдоль линеек ()бяза- тельно paiiHo ходу грейферного механизма. Собачка, которая выводит готовую деталь с участка 15 по направляющей 20 при первом ходе .чипеек грайферного механизма совер- inaer хо.юстой ход. После хода линеек грай- (jiepHoro механизма влево и установки заго- 0 товок па матрицах, ииеЕшонилиндру 13 да- егся команда па обратпьн ход вправо. При :)1ом ходе собачки наклоняются в сторону, обратную ходу, и проходят под заготовками, а гг1мгемная Г1, гощ.адка возвращается ггод схг ,агТ)Г маггинулятора, ког())ьге за вре.мя хода .типеек в;гево из накоггг1те, 1Я взяли сле- дугогцую заготовку. Собачки возгфащаются г( исходггое положение (фиг. 7 и 9). Начинается гггбка сразу в двух нгтамггах.
П. гаггка 16 при встрече с дета.мью уходггт в ггаз 18 граверсы, т.к. голкате.чи, связан- пг,ге с riei t, мог ут сгюбодгго ггодняться в от- Г ерстиях граверсьг.
lloc. ie окопчаггия гибки и гг()дг,ема травер 5 с ггуапсонами 7 заготовка ira участке 14 снимается с ггуаггсона жестким с ьемником 22,, .)акре1г,1еггпым гга столе, а на участке 15 деталь снимается следуюни1м образом. При достижении то.ткателямп 19 ггижпей поверх- ггосгп гганравляюн1ей 20 и дал1,нейгггем ходе траверсы вверх планка 16 и толкатель 19 нрекрагцагот свое движение вверх вместе с т)аверсой; ггачииается жесткий дета- , ги. Сггятая деталь остаетея на ггаггравляю- гнег 20, а нижняя ее гговерхность расггола- гаечся гга ггодггружиггенньгх ггланках 25, ко- торьге находятся на уровгге зерка.та матригь Расгго/гожегиге ггижней гюверхности готовой детали гга уровгге зеркала матриц достигается кс)ггструктивны.м расчетом размеров де- гале11 17 и 19 и стуг1ег1чатог () отверстия в тра-
5
0
5
0
5
Ht pce с уютом iieooxo.uiMuii ио. шчины кода труверсы BRt px. На участке 14 снятия :5аг()- говка laK/Ki. попадает па подпрч жинеппые планки 25, которые предначначепы для осуществления г)алици()ннот npiMiecca iiioKn с прижимом и пос.телуюшего нодт,еме uiro- товки до уровня ,1а матрицы, (лммар- ное уси.тне пружин в планках состав.тяет 0,3 от усилия гибки.
После окончаиия хода т|)аверсы 5 вверх и съема детали на участке 15 и заготовки на участке 14 с нуансонов 7 включается нневмо- цилиндр 13 и грейферны механизм совершает следуюни1Й никл работы, при котором движением линеек влево удаляется с участка 15 готовая деталь с номошью на1 равляк)П1ей 20 и собачки, установленное па средиеГ линеГ|ке, не 1едвн1 аег , я .киотовка ка 14 на участок 15, и заготовка н.-1и)д схиа тов, установленная на прием нон пл ин.цке , 1ниеек, персноснтся на участок 14. Готовая дета.чь уда,1яется беспреня гсгвс нни, lai-. ка; ; в нланке К) вынолнен наз 18.
При ходе .чнпеек rpeit(t)epHoro механизма вправо, собачки беспрепятственно прохо.чят под заготовкамн на участках 15 и 14. а вес заготовок достаточен для того, чюбы не было их с 1е1нення в матрицах. По возможно нред смотреть донолпителыН)1е мероприятия д. 1я падежностн расположения за1ч товок на матрицах. Однн из таких вариантов изображен на фнг. 11 и 12, где ,1усматри а- ютсн планки 2( устанавливаемые снаружи матриц, на которых вьпю.шены нодп)ужи- пенные уно)ы 27 и 28, (обеспечивающие до- нолните. 1ьпу|) ()иксацик) заю овок.
Пред,1агаемое ycTpoi icTBo позволяег автоматизировать процесс I ибки дега,те11 вы- сотой бо. плне, чем )ытая lii.icoia пресса, в частности пг1 учн1)1х заготозсж .i/niHoii ра. б(),тее 800 мм па кромкошбочном прессе типа РА 160 д, 1я изготов.к ния конденсаторов. 11спо.1ьзовап111 cepnitnoio де()о)мируюн1его и транспортного обо|пдова- нпя нозво, 1нт уве.ишнть Н)1)и ии)дипе.1ьиость дета. км при минимальньгх затратах па создание .laiiHoro автоматнзи1)ованно1 Ч) устройства.
Формула u:i(6pi4 Hi-ifi
Устройство для гибкн дета.1е11 .замкнутого контура, С1)держа1цее матрицы д,пя н|)ед- le. ibHcni и окончательной гпбкн, уста- нов.к нные 11ос,педовате.11)Но на сто.че пресса, п апсоны, расноложенные над матрицами и с по,чзуном пресса, сьемник деталей с пуансона и механи.м переменимся ;, i; о iHioK 1еж.1у м.прни.п , ичаг ицеес.ч
1еМ, 41U, I- не,) ПОВЬМПе.Ч l: . : : .Ц .ВОДИТе. Ь|;П I ; при aiiTi .. р. . :,:. - ; ибкс и.- LiriyiHbix заг оювок де1.1Л1-Г: ,;.. Moii, бо,-|ь- HiLii. .(акрым/ Hr.i- ii,i .. нуансон окончательной i ибкп Bbiiio.iiui в внде тра- верс1)1. закренленпоп на нол(1К . а рабочий участок нуансона расно,1ожен па консо, ч часгке rpaBCjicbi, .И)Ж.с linoM за п)еде- ммп iio,ru на и обрап1енном 1 мпцом но ход Техно,1огнческого н)оцесса, KJIDMC гого, уст- poiieiBo снабжено направ.1Я10111еи ба. 1кой, .faKi)(4i.ieHHoii над К(1нсо,-1,пым ччасгком тра- lie H iii н н 1ею|це11 на обршпенно и к траверсе си/роне уто, иценпьп1 час1ок .тля о.чвата согнутой дета,1н, при (гом съемник loTOBoii дета, 11( выно,тнеп в вид(. то.тка- ie.,ei , распо,Н)Жепных в консольном хчастке тпаверсы, ве|1хннй конец кочирыч выпо.шен с в(кп;(1жпостью взаимоде|(ствия с нан(1ав,1я- кчцей ба, 1кой, а механизм перемещения за- io i:iii)K межд матринами Bbnio.iiiCH в вп.те I )е|1Д011 нодачп.
IM
ш
Фиг. б
гъ
/
-
г
И 10
2
Йа
g
Фиг.7
10 1
Фи2.8
25
т
Фиг. 10
| Дурандин | |||
| ЛА., и Ши.хов Н | |||
| А | |||
| .Л, 1ьб()м Штамны для деталей | |||
| - Л .; эл ектроте.х н и ч ее ко го Т | |||
| И | |||
| Антонова П | |||
| конструкции н схем, хо.юдной штамповки ме, 1ких Маншностроеиие, 1978, с | |||
| Способ подготовки рафинадного сахара к высушиванию | 0 |
|
SU73A1 |
