Изобретение относится к машино- строе.нию и может найти применение при загрузке деталями технологического оборудования различного назначения.
Цель изобретения - упрощение конструкции устройства за счет сокращения числа приводных механизмов.
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - временная диаграмма функционирования системы управления.
Устройство для ориентации деталей содержит наклонные подающий 1 и отводящий 2 лотки, ориентатор, выполненный в виде коромысла 3, установленного на горизонтальной оси 4 и имеющего центр тяжести, смещенный в сто-. рону подающего лотка 1. Коромысло 3 снабжено фиксатором 5, например электромагнитным. Расстояние между лотками 1 и 2, длина плечей коромысла 3 и место его размещения зависят от типа и габаритов ориентированных деталей.
Система опознавания и управления выполнена в виде двух датчиков 6 и 7, например индуктивно-торцовых, распо- .юженных на IЮдaIoщo лотке 1 , D-триг гера 8, элек 1 ронного ключа 9 на транзисторе и датчика 10, реагиру10 цсго на деталь, проходящую по отво икцему лотку 2, Датчик 6 соединен с D-nx.o дом триггера 8, датчик 7 - с С р.ходом триггера 8, датчик 10 с К-нходом триггера 8. Выход триггера 8 через электронный ключ 9 связан с электромагнитом фиксатора 5. Конденсатор 11 установлен на R-пходе триггера 8 и предназначен для установки его в исходное состояние при включении всего устройства.
Устройство работает следующим образом.
В исходном положении коромысло 3 не зафиксировано, свободное его плечо (без фиксатора) расположено на линии траектории днияс чцейся с подающего лотка 1 детали. Детали, например пружины с неременным шагом, после первичного ориентирования в вибропитателе поип учно, перемещаясь по подающему лотку 1, подходят к системе опознавания. При движении детали отличительным признг лсом вперед (фиг .2а) первым срабатывает датчик 6, настроенный на данньй отличительный признак. При р альнейием продвижении детали срабатывает датчик 7, регистри0
5
0
5
0
5
0
5
0
5
рующий деталь в любом положении, по-i давая сигнал на синхронизирующий С-вход триггера 8.
Логическая единица, присутствующая в этот момент на D-входе триггера 8, подается на выход триггера 8 и открывает электронный ключ 9. Запитывается электромагнит фиксатора 5. Коромысло 3, занимая горизонтальное положение (исходное), жестко фиксируется. Его свободное плечо (без фиксатора) становится упором для поступающей на него с лотка 1 детали.
Деталь при соударении переворачивается и ее отличительный признак оказывается сзади. В таком положении она попадает на отводящий лоток 2, проходит по нему, минуя датчик 10. Последний срабатывает и сигнал логического нуля поступает на R-вход триггера 8 и возвращает его в исходное состояние. Электромагнит фиксатора 5 отключается. Коромысло 3 занимает исходное положение.
При движении детали отличительным признаком назад (фиг. 26) в момент срабатывания датчика 7 на D-входе присутствует логический нуль, так как датчик 6 срабатывает после датчика 7, ввиду того, что признак идет в конце движения детали.
HP выходе D-триггера 8 состояние не .нится и, следовательно, включение электромагнита фиксатора 5 не произо щет. Деталь, попав на свободное плечо, поворачивает коромысло 3 относительно оси 4. Одно его плечо поднимается к лотку 1, а другое опускается к лотку 2. Деталь плавно соскальзывает по коромыслу 3 и попадает на лоток 2, не изменив своего положения, т.е. отличительным признаком назад. Детали, ориентированные однозначно, перемещаются по отводящему лотку 2 в зону обработки или сборки.
Формула изобретения
Устройство для ориентации деталей, содержащее наклонные подающий и отводящий лотки с установленным меаду ними ориентатором и систему опознавания управления, отличающееся тем, что, с целью упрощения конструкции, орнентатор выполнен в виде коромысла, установленного на горизонтальной оси и имеющего смещенный JB сторону подающего лотка центр тяжести, и фиксатора для базирования и стопорения коромысла в горизонтальном полохемии, связанного с системой опознавания и управления.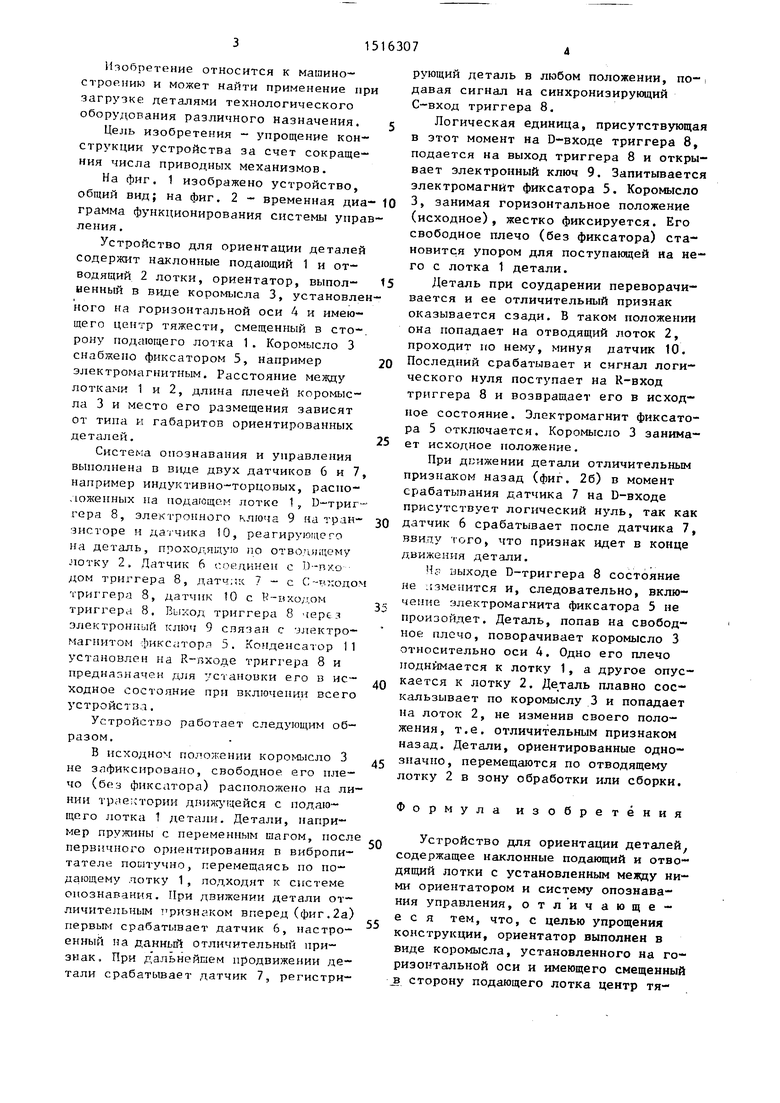
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочное устройство | 1985 |
|
SU1278177A1 |
| Устройство управления процессом разбраковки и ориентации деталей | 1988 |
|
SU1639784A1 |
| Устройство вторичной ориентации деталей типа колпачков | 1985 |
|
SU1291358A1 |
| Устройство для ориентации деталей | 1988 |
|
SU1549719A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАННОЙ ПОДАЧИ СТРАТИФИКАТОРОВ | 1993 |
|
RU2053094C1 |
| Устройство для подачи деталей к параллельно работающим станкам | 1988 |
|
SU1537477A1 |
| Устройство для автоматического ориентирования резьбовых деталей | 1986 |
|
SU1431914A1 |
| Загрузочный ротор | 1991 |
|
SU1816642A1 |
| Устройство для поштучной выдачи деталей | 1986 |
|
SU1414559A1 |
| Устройство для ориентированной подачи деталей | 1987 |
|
SU1530410A1 |
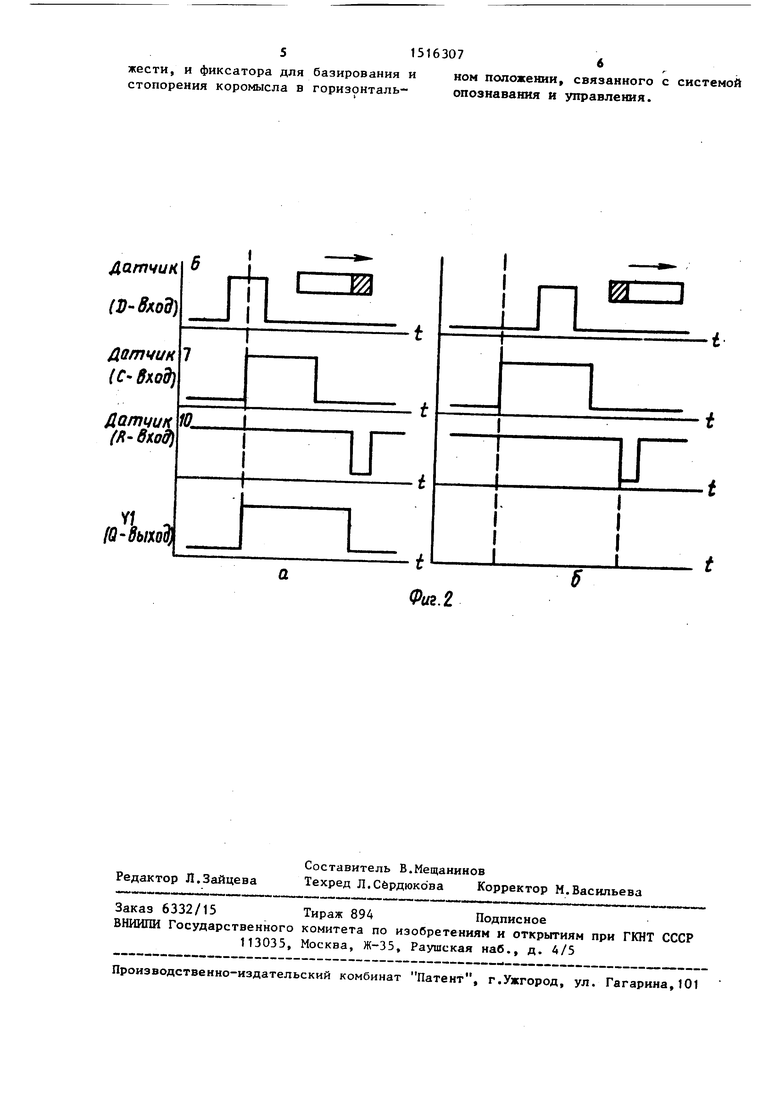
Изобретение относится к машиностроению и может найти применение при загрузке деталями технологического оборудования различного назначения. Целью изобретения является упрощение конструкции устройства за счет сокращения числа приводных механизмов. Детали, например пружины, с переменным шагом перемещаются по подающему лотку 1 поштучно в положении отличительным признаком вперед или назад. По сигналу датчиков 6 и 7 контроля положения и наличия деталей системы опознавания и управления электромагнит фиксатора 5 стопорит коромысло 3 в горизонтальном положении при перемещении детали отличительным признаком вперед. Деталь, ударяясь в плечо коромысла, переворачивается /кантуется/ на угол 180° и падает в отводящий лоток 2 в ориентированном положении. При перемещении детали по подающему лотку 1 отличительным признаком назад по сигналу датчиков 6 и 7 электромагнит фиксатора 5 не получает сигнала. Деталь падает на коромысло 3 и, поворачивая его вокруг оси и демфируя силу удара, не изменяет своего положения, перемещаясь в отводящий лоток 2. В связи с смещением центра тяжести коромысла 3 в сторону подающего лотка 1 в исходном положении оно базируется на электромагните фиксатора 5, занимая горизонтальное положение. 2 ил.
| Авторское свидетельство СССР 1269383, кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
