(Л
СП ел
со
фиг.7
рабочую часть упора 6, выполненную в виде скобы 8 с карманом 10, В нижнем и верхнем углах скобы 8 установлены датчики контроля наличия деталей. Если деталь поступила в скобу 8, занимая положение, при котором опорные плоскости штечей ее дуги обращены вниз, то она проваливается в карман 10 скобы 8. При этом ось ее отверстия опускается относительно упора 6 и совпадает с осью перемещения пальца 18 механизма вторичного ориентирования, установленного с возможностью возпратно-посту- 1;ательного перемещения н горизонтальной плоскости перперодикулярно оси 11:1дающе о лотка. По команде датчика включают электродвигатель, при- ьодящий во вращение валы 24, 17 и 22. Кулачок 21, воздействуя на палец 18, вводит его в отверстие детали. Далее кулачок 16 и пружины 7 от- упор 6 назад от лотка. Одновременно, через ролик 13 движение от упора 6 передается на отсекатель 14 к он перемещается вперед к лотку, отсекая находящуюся в скобе 8 деталь от основного потока. В результате перемещения упора 6 назад скоба 8 его рабочей части выходит из-под находящейся в ней детали и она свободно повисает на нем. Далее кулачок 21 и пружина 20 возвращают палец 18 назад в исходное положение. При этом деталь, упираясь в переднюю кромку упора 6, снимается с пальца и поступает в кассету 25. Кулачок 16 возвращает упор 6 и отсекатель 14 в исходное положение. Если деталь занимает в 8 рабочей части упора положение, при котором опорные плоскости плечей ее дуги обращены вверх, то при отходе упора 6 назад она разворачивается относительно пальца 1 8 на I 80 и в переориентированном положении выдается в кассету 25. 3 ил.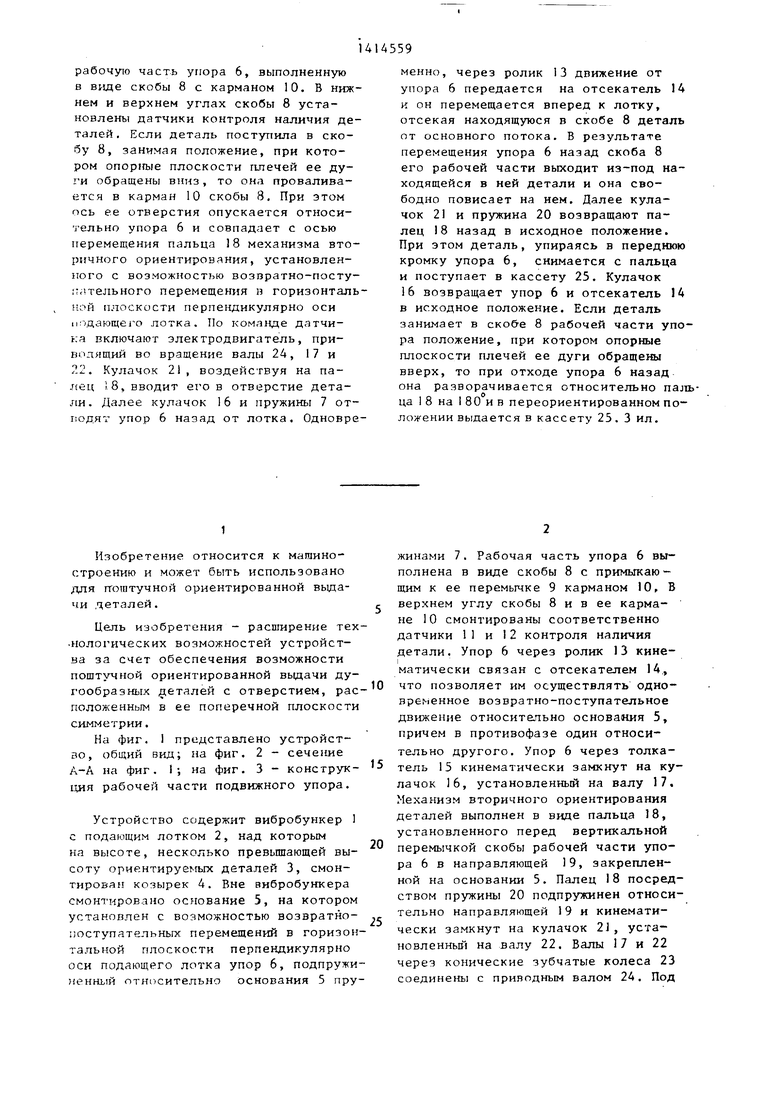

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи деталей | 1983 |
|
SU1152098A1 |
| Устройство для автоматической сборки узлов | 1982 |
|
SU1134340A1 |
| Устройство для подачи и обработки деталей | 1986 |
|
SU1402392A1 |
| Устройство для подачи цилиндрических деталей | 1980 |
|
SU963801A1 |
| Винтозавертывающая машина | 1973 |
|
SU478706A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАННОЙ ПОДАЧИ СТРАТИФИКАТОРОВ | 1993 |
|
RU2053094C1 |
| Автомат для сборки деталей типа валик-втулка | 1976 |
|
SU657950A2 |
| Роторный автомат питания | 1987 |
|
SU1524988A1 |
| Устройство для сборки резьбовых соединений | 1985 |
|
SU1337244A1 |
| Устройство роторного типа для поштучной выдачи деталей | 1974 |
|
SU500015A1 |
Изобретение относится к области машиностроения и может быть использовано для поштучной ориентированной выдачи деталей. Цель изобретения - расширение технологических возможностей устройства за счет обеспечения возможности поштучной ориентированной выдачи дугообразных деталей с отверстием, расположенным в ее поперечной плоскости симметрии. Детали 3 сплошным потоком в один ряд транспортируются по подающему лотку 2 вибробункера 1, над которым смонтирован козырек 4, и поступают в
Изобретение относится к машиностроению и может быть использовано ЛД1Я тзгатучной ориентированной выдачи деталей.
Цель изобретения - расширение тех нологических возможностей устройства за счет обеспечения возможности поштучной ориентированной выдачи дугообразных деталей с отверстием, рас положенным в ее поперечной плоскости симметрии.
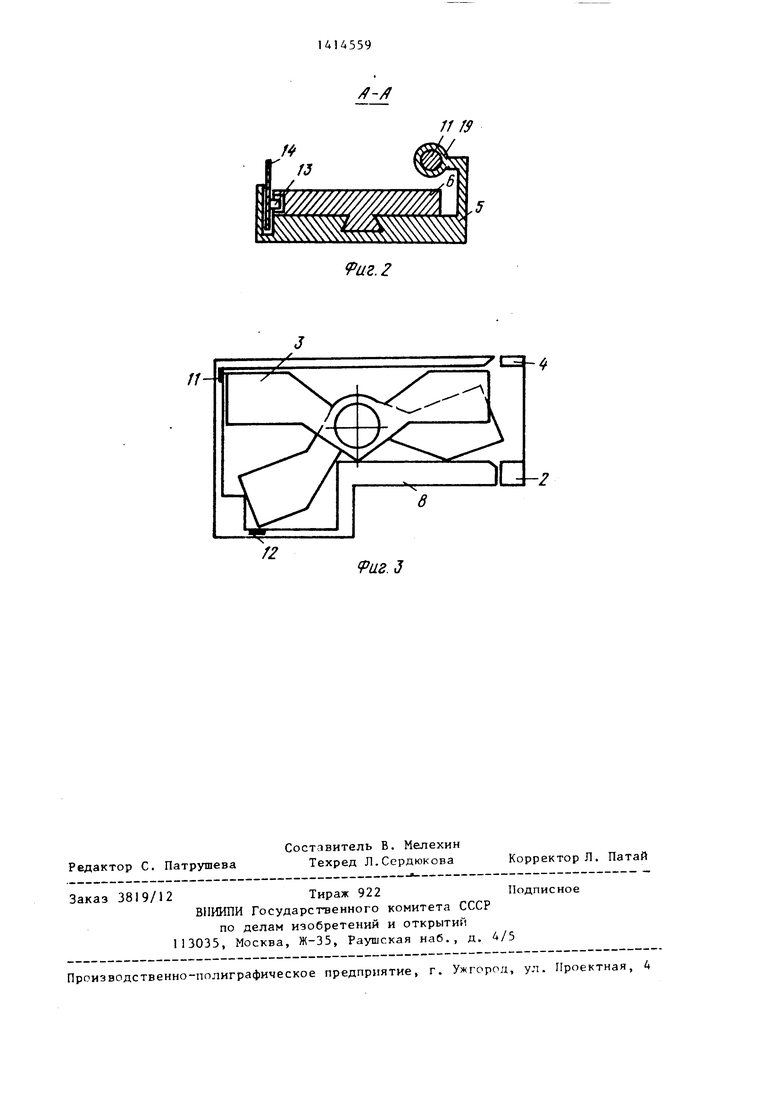
На фиг. 1 представлено устройство, общий вид; на фиг, 2 - сечение А-А на фиг. 1; на фиг, 3 - конструк- ция рабочей части подвижного упора.
Устройство содержит вибробункер 1 с подающим лотком 2, над которым
на высоте, несколько превышающей высоту ориентируемых деталей 3, смонтирован козырек 4. Вне вибробункера смонтировано основание 5, на котором установлен с возможностью возвратно- :юступательньгх перемещений в горизонтальной плоскости перпендикулярно оси подающего лотка упор 6, подпружиненный относительно основания 5 прус
5
0
,
жинами 7. Рабочая часть упора 6 выполнена в виде скобы 8 с примыкающим к ее перемычке 9 карманом 10, В верхнем углу скобы 8 и в ее кармане 10 смонтированы соответственно датчики 11 и 12 контроля наличия детали. Упор 6 через ролик 13 кинематически связан с отсекателем 14., что позволяет им осуществлять одновременное возвратно-поступательное движение относите-пьно основания 5, причем в противофазе один относительно другого. Упор 6 через толкатель 15 кинематически замкнут на кулачок 16, установленный на валу 17. Механизм вторичного ориентирования деталей выполнен в виде пальца 18, установленного перед вертикальной перемычкой скобы рабочей части упора 6 в направляющей 19, закрепленной на основании 5. Палец 18 посредством пружины 20 подпружинен относительно направляющей 19 и кинематически замкнут на кулачок 21, уста- новленньш на валу 22. Валы 17 и 22 через конические зубчатые колеса 23 соединены с приводным валом 24. Под
3U
.рабочей частью упора 6 на основании 5 установлена кассета 25,
Устройство работает следующим образом.
Детали 3 сплошным потоком в один ряд транспортируются по подающему лотку 2 вибробункера. Благодаря тому что над лотком 2 смонтирован козырек 4, они занимают на лотке два поло- жения: опираясь на рабочую поверхность лотка опорными плоскостями плечей дуги или контактируя с рабочей поверхностью лотка криволинейной поверхностью своей дуги, и одно- временно, упираясь в козырек А опорной плоскостью одного из плеч своей дуги. Из лотка детали поступают в скобу 8 рабочей части упора 6 и упираются в ее вертикальную nepeMi niKy, Если деталь занимает первое из указанных положений, то она проваливается своей передней частью в карман 10 скобы 8. При этом ось ее отверстия опускается относительно упора 6 вниз и совпадает с осью перемещения пальца 18 механизма вторичного ориентирования. Далее по сигналу датчика 12 включается электродвигатель (не показа) , которьш приводит вс вращение приводной вал 24 и через зубчатые колеса 23 - валы 17 и 22, Кулачок 21 воздействует на палец 18 и он, сжимая пружину 20, входит в отверстие детали до, имеющегося на нем упо ра. Затем по мере вращения пала 17, кулачок 16 начинает контактировать с толкателем 15 по уменьшающемуся радиусу. Растянутые пружины 7, замыкая толкатель 15 на кулачок 16, ежи- маются и перемещают упор 6 назад. Одновременно через ролик 13 движение о упора 6 передается на отсекателъ 14 и он перемещается вперед к лотку и отсекает переднюю деталь, находя- щуюся в скобе 8, от основного потока деталей. В результате перемещения упора 6 назад скобы 8 его рабочей части выходит из-под находящейся в ней детали и она свободно повисает на пальце 18, занимая горизонтальное положение. Далее по мере вращения вала 22 кулачок 21 контактирует с пальцем 1В по уменьшающемуся радиусу и пружина 20, замыкая палеи на кулачок, возвращает его назад в исходное положение. При этом деталь, упираясь в переднюю кромку рабочей части упора, снимается с пальца и и поступает в кассету 25. Затем кулачок 16 возвращает упор 6 вперед в исходное положение, а отсекатель 14 соответственно назад. Далее цмкл повторяется.
Если деталь занимает т скобе 8 рабочей части упора 6 второе из указанных положений, то работа упора, отсекателя и механизма вторичного ориентирования начинается по команде датчика 11 и осуществляется аналогично рассмотренному, В этом случае после отхода упора назад деталь разворачивается на пальце на 180 , занимая горизонтальное положение опорными плоскостями вниз, и после вторичного ориентирования также поступает в кассету 25,
Формула изобретени
Устройство для поштучной выдачи деталей, содержащее подающий лоток и подвижный упор, кинематически связанный с отсекателем, отличающееся тем, что, с целью расширения технологических возможностей, оно снабжено механизмом вторичного ориентирования деталей, вы- полненны.) в виде пальца, установленного над упором перпендикулярно оси подающего лотка и с возможностью возвратно-поступатепьных перемещений относительно него от соответствующего привод., а упор и отсекател смонтированы с возможностью возвратно-поступательных перемещений в горизонтальной плоскости в противофаз относительно друг друга, пр1гчем рабчая часть упора выполнена в В1ще скбы с карманом, расположенной в верткальной плоскости перпевдикулярно пальцу и обращенной своей открытой стороной к выходной части подающего лотка,
/
11 /9
Раг.г
Раг.З
| Устройство для поштучной выдачи деталей | 1979 |
|
SU948610A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
