JJ
и
/J
IS
полнениого в виде прямоугольной рамы. На направляющих поперечной штанги находится каретка 4 с рабочим органом, кинематически связанным с двигателями 18 и 19 посредством гибкого элемента 5, проходящего через отклоняющие блоки, а также передачи винт - гайка. Для движения вдоль осей X или Y включают управляемый фиксатор 17, защемляющий гибкий элемент на каретке, а также соответствующий электромагнитный фиксатор положения 23 или 24. Затем включаются в соответствующем направлении двигатели 18 и 19,
передающие движение гибкому элементу через приводные блоки 7 и 8. Для движения рабочего органа вдоль оси Z от- ключают управляемы фиксатор 17 и включают оба электромагнитных фиксатора положения 23 и 24, установленные соответственно на поперечной щтанге и на каретке. Включают фрикционную электромагнитную муфту 21, а затем - двигатели. Вращение рабочего органа относительно вертикальной оси достигается отключением фрикционной электромагнитной муфты 21.
1 з.п.ф-лы, 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отпирания замка крышки люка вагона | 1988 |
|
SU1579854A1 |
| Манипулятор | 1985 |
|
SU1283085A1 |
| УСТРОЙСТВО ДЛЯ БЕЗОСТАНОВОЧНОЙ ПОПЕРЕЧНОЙ РЕЗКИ ГОФРОКАРТОНА | 2004 |
|
RU2257282C1 |
| Устройство для рыхления грунта | 1982 |
|
SU1079776A1 |
| Устройство для загрузки транспортных средств сыпучими грузами | 1985 |
|
SU1511167A1 |
| Ручная каретка для набивки тканей | 1980 |
|
SU971672A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Устройство для шаговых перемещений груза | 1989 |
|
SU1698155A1 |
| МАШИНА ДЛЯ УБОРКИ ТРОТУАРОВ | 1992 |
|
RU2094562C1 |
| Склад для длинномерных грузов | 1987 |
|
SU1472376A1 |
Изобретение относится к машиностроению и может быть использовано в других областях техники, где необходимо обеспечить координатное перемещение рабочего органа. Цель изобретения - повышение надежности в работе за счет исключения заклинивания поперечной штанги в направляющих основания. Поперечная штанга 3 установлена на направляющих 1 основания, выполненного в виде прямоугольной рамы. На направляющих поперечной штанги находится каретка 4 с рабочим органом, кинематически связанным с двигателями 18 и 19 посредством гибкого элемента 5, проходящего через отклоняющие блоки, а также передачи винт гайка. Для движения вдоль осей X или Y включают управляемый фиксатор 17, защемляющий гибкий элемент на каретке, а также соответствующий электромагнитный фиксатор положения 23 или 24. Затем включаются в соответствующем направлении двигатели 18 и 19, передающие движение гибкому элементу через приводные блоки 7 и 8. Для движения рабочего органа вдоль оси Z отключают управляемый фиксатор 17 и включают оба электромагнитных фиксатора положения 23 и 24, установленные соответственно на поперечной штанге и на каретке. Включают фрикционную электромагнитную муфту 21, а затем - двигатели. Вращение рабочего органа относительно вертикальной оси достигается отключением фрикционной электромагнитной муфты 21. 1 з.п.ф-лы, 3 ил.
.-
Изобретение относится к машиностроению и другим областям, где необходимо обеспечить координатное перемещение рабочего органа, и может использоваться для роботов, графопостроителей, кранов и в прочих аналогичных механизмах.
Цель изобретения - повышение надежности работы за счет исключения заклинивания поперечной щтанги в направляющих основания.
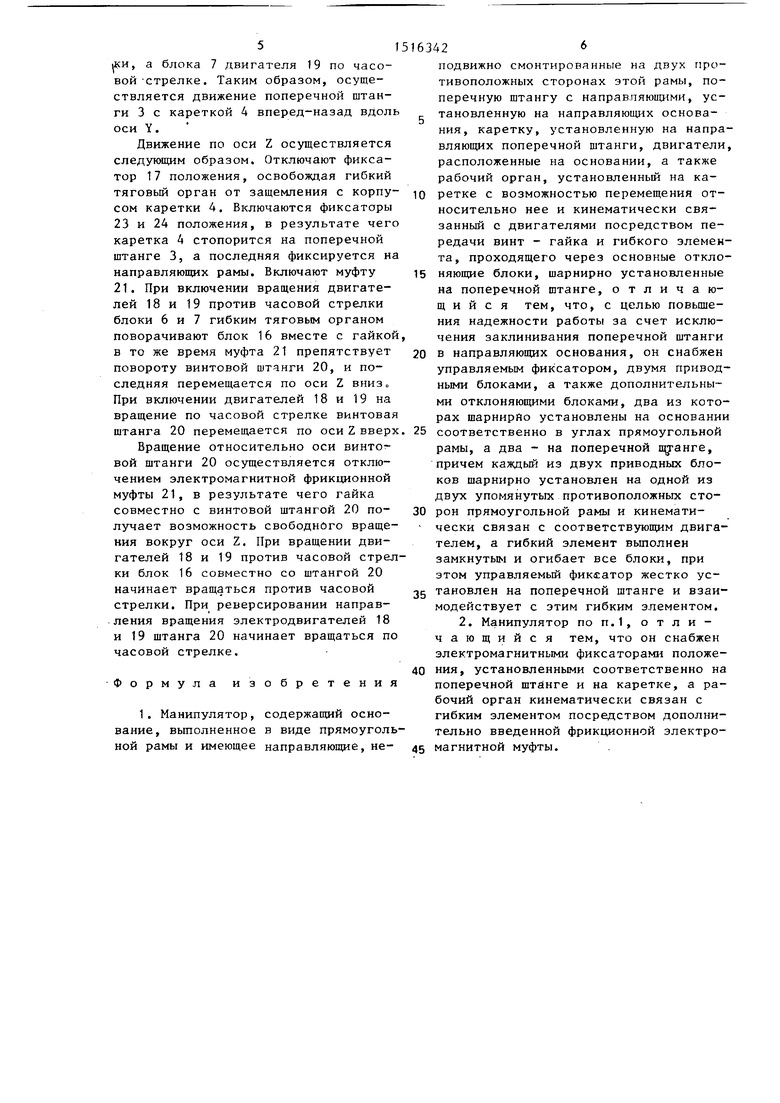
На фиг.1 представлен манипулятор, общий вид; на фиг.2 - схема установки поперечной штанги; на фиг.З - разрез А-А на фиг.2.
Манипулятор содержит установленную в параллельных направляющих 1 рамного основания 2 поперечную штангу 3, на которой установлена каретка 4, соединенная бесконечным гибким элементом 5 с приводны1-1И 6 и 7 и отклоняющими 8 и 9 блоками основания 2 и двумя парами основных отклоняющих блоков 10,11 и 12,13 поперечной штанги 3, причем одна из ветвей гибкого элемента 5 взаимодействует с блоками 14 - 16, а другая ветвь связана с корпусом операционной каретки 4 элек- тромагнитньЕм фиксатором 17 положения, Привод блоков 6 и 7 осуществляется от реверсивных электродвигателей 18 и 19. На блоке 16 каретки 4 установлена винтовая штанга 20 с возможностью осевого перемещения и вращения вокруг продольной оси. Винтовая штан
га 20 снабжена фрикционными электро магнитными муфтами 21 и 22, одна из которых (21) установлена на гайке (не показано) винтовой штанги 20 с
25
30
д, 40
50
55
возможностью фиксации гайки и корпуса блока 16 каретки 4, а другая (22) установлена на винтовой штанге 20 с возможностью фиксации относительно корпуса каретки 4. Винтовая штанга 20 несет на себе рабочий орган. Кроме того, поперечная штанга и каретка 4 имеют фиксаторы 23 и 24 положения.
Манипулятор работает следующим образом.
Движение по оси X осуществляется в следующем порядке. Включают электромагнитные фиксаторы 17 ); 23, в результате чего гибкий элемент 5 защемляется в корпусе каретки 4 а поперечная штанга 3 стопорится относительно направляющих рамы 2, Движение каретки 4 по оси X влево осуществляется от гибкого тягового органа при вращении приводных блоков 6 и 7 двигателей 18 и 19 в одну сторону против часовой стрелки. Движение по оси X вправо происходит при одновременном вращении в одну сторону по часовой стрелке приводных блоков 6 и 7.
Движение по оси Y осуществляется в следующем порядке. Включают электромагнитные фиксаторы 17 и 23 и включают электромагнитный фиксатор 24, в результате чего каретка 4 стопорится на поперечной штанге 3. Движение по оси Y вперед осуществляется при одновременном вращении приводных блоков 6 и 7 в разные стороны - блока 6 двигателя 18 по часовой, а блока 7 двигателя 19 против часовой стрелки. Движение по оси Y назад происходит при одновременном вращении блока 6 двигателя 18 против часовой
и, а блока 7 двигателя 19 по часовой стрелке. Таким образом, осуществляется движение поперечной штанги 3 с кареткой 4 вперед-назад вдоль оси Y.
Движение по оси Z осуществляется следующим образом. Отключают фиксатор 17 положения, освобождая гибкий тяговый орган от защемления с корпу- сом каретки 4. Включаются фиксаторы 23 и 24 положения, в результате чего каретка 4 стопорится на поперечной штанге 3, а последняя фиксируется на направляющих рамы. Включают муфту 21. При включении вращения двигателей 18 и 19 против часовой стрелки блоки 6 и 7 гибким тяговым органом поворачивают блок 16 вместе с гайкой в то же время муфта 21 препятствует повороту винтовой штанги 20, и последняя перемещается по оси Z вниз„ При включении двигателей 18 и 19 на вращение по часовой стрелке винтовая штанга 20 перемещается по оси Z вверх
Вращение относительно оси винтовой штанги 20 осуществляется отключением электромагнитной фрикционной муфты 21, в результате чего гайка совместно с винтовой штангой 20 по- лучает возможность свободного вращения вокруг оси Z. При вращении двигателей 18 и 19 против часовой стрелки блок 16 совместно со штангой 20 начинает вращаться против часовой стрелки. При реверсировании направления вращения электродвигателей 18 и 19 штанга 20 начинает вращаться по часовой стрелке,
Формула изобретения
1, Манипулятор, содержащий основание, выполненное в виде прямоугольной рамы и имеющее направляющие, не-
подвижно смонтированные на двух противоположных сторонах этой рамы, поперечную штангу с направляюишми, установленную на направляющих основания, каретку, установленную на направляющих поперечной щтанги, двигатели расположенные на основании, а также рабочий орган, установленный на каретке с возможностью перемещения относительно нее и кинематически свя- занныИ с двигателями посредством передачи винт - гайка и гибкого элемента, проходящего через основные отклоняющие блоки, шарнирно установленные на поперечной штанге, отличающийся тем, что, с целью повьщ1е- ния надежности работы за счет исключения заклинивания поперечной штанги в направляющих основания, он снабжен управляемым фиксатором, двумя приводными блоками, а также дополнительными отклоняющими блоками, два из кото- рах шарнирйо установлены на основании соответственно в углах прямоугольной рамы, а два - на поперечной п -анге, причем каждый из двух приводных блоков щарнирно установлен на одной из двух упомянутых противоположных сторон прямоугольной рамы и кинематически связан с соответствующим двигателем, а гибкий элемент вьшолнен замкнутым и огибает все блоки, при этом управляемьй фиксатор жестко установлен на поперечной штанге и взаимодействует с этим гибким элементом. 2. Манипулятор поп.1, отличающийся тем, что он снабжен электромагнитными фиксаторам положения, установленными соответственно на поперечной штанге и на каретке, а рабочий орган кинематически связан с гибким элементом посредством дополнительно введенной фрикционной электромагнитной муфты.
19
А-А
rj
| Манипулятор | 1985 |
|
SU1283085A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
