в зависимости от направления движения. Для вьщвижения механической ру- ки включают фиксирующие муфты 35-38, установленные на первом и конечном звеньях, и двигатель 13, а для перемещения руки вверх включают двигаг10
15
20
Изобретение относится к средствам втома тизации производства, а имено к манипуляторам и промышленным оботам, и может.быть использовано быстропереналаживаемых автоматиеских линиях.
Целью изобретения является расти- : рение кинематических возможностей за счет обеспечения дополнительной степени подвижности при сокраи;ении числа приводньпс двигателей.
Сущность изобретения поясняется чертежами.
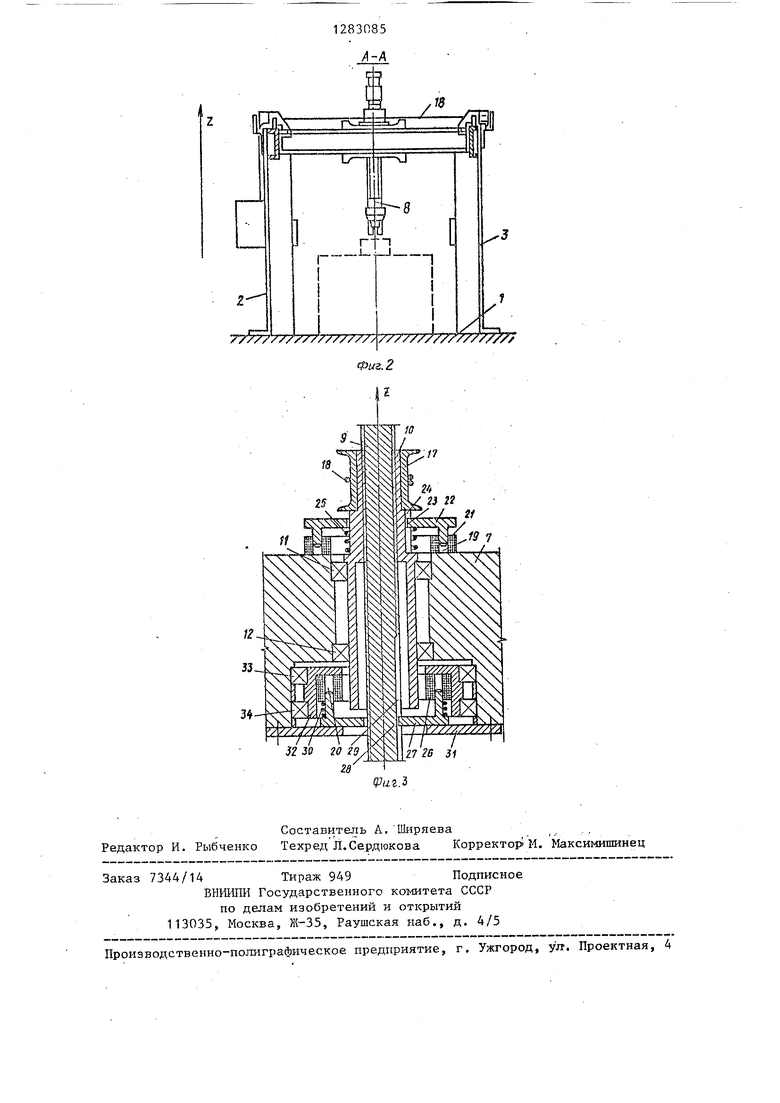
На фиг. 1 изображен манипуЛя тор, вид сверху; на фиг. 2 - разрез - А-А на фиг. 1j на фиг. 3 - механическая рука манипулятора.
Манипулятор содержит основание 1 с опорами 2 - 5 и последовательно установленные на нем звенья 6 и 7 во взаимно перпендикулярньк направляющих. На конечном звене 7 смонтирована механическая рука 8 с возможностью осевого перемещения и вращения вок- 05 руг продольной оси, а ее привод выполнен в виде винтового механизма, на винте 9 которого установлено захватное устройство, а гайка 10 установлена в опорах 11 и 12.
Приводные двигатели 13 и 14 установлены соответственно на опорах 2 и и 4, блоки 15 и 16 закреплены на первом звене 6, а блок 17 смонтирован на гайке 10 винтового механизма, при . этом трос 18 своей центральной частью охватывает блок 17, проходит через блоки 15 и 16 и своими концами связан с выходными злементами двигателей 13 и 14.
Механическая рука 8 снабжена фик- сирующими муфтами 19 и 20, одна из которых (19) установлена на гайке 10 винтового механизма с возможностью,
фиксации гайки 10 и конечного звена
45
30
40
тель 14. Для вращения механической руки вокруг ее оси включают фиксирующие муфты 35-38, установленные на первом и конечном звеньях 6 и 7 и на винте винтового механизма, и двигатель 13 или 14. 3 ил.
0
5
0
05
45
30
40
7 манипулятора, а другая (20) установлена на винте 9 винтового механизма с возможностью фиксации винта 9 и гайки 10.
Электромагнитная фиксирующая муфта 19 выполнена в виде кольцевого электромагнита 21 и кольцевого сердечника 22 с выступом 23, подвижно связанным в осевом направлении с пазом 24 гайки 10, которая взаимодействует с кольцевым сердечником 22 посредством пружины 25 сжатия. Электромагнитная фиксирующая муфта 20 выполнена в виде кольцевого электромагнита 26 и кольцевого сердечника 27 с выступом 28, подв11жно связанным в осевом направлении с пазом 29 -винта 9. Кольцевой сердечник 27 взаимодействует с кольцевым электромагнитом 26 посредством пружины 30 сжатия. При этом крьшгка 31 жестко связана посредством фрикционного контакта; с кольцевым сердечником 27 электромагнитной фиксирующей муфты 20. Кольцевой электромагнит 26 закреплен в фигурной втулке 32, установленной на опорах 33 и 34, которые, в свою очередь, установлены в конечном звене 7 манипулятора. На первом звене 6 и (конечном звене 7 установлены фиксиру- ;ющие -муфты 35-38.
Манипулятор работает следующим образом.
На электромагнитную фиксирующую муфту 19 подается напряжение, в результате чего кольцевой сердечник 22 начинает взаимодействовать с коль- цевьм электромагнитом 21 и блок 17 стопорится. Далее включают фиксирующие муфты 35 и 36, расположенные на первом звене 6. Движение по оси X влево осуществляется при включении двигателя 13, а двигатель 14 слегка притормаживает движение. Движение
по ои X вправо осуществляется при включении двигателя 14, а двигатель 13 слегка притормаживает движение. Таким образом, осуществляется движение по оси X влево - вправо.
Движение по оси У осуп ествляется в следующем порядке. Отключают фиксирующие муфты 35 и 36 и включают фиксирующие муфты 37 и 38, расположенные на конечном звене 7. Движение по оси У вперед осуществляется при включении двигателя 13, а двигатель 14 при этом слегка притормаживает движание. Движение по оси Y назад осуществляется при включении двигателя 14,.а двигатель 13 при этом слегка притормаживает движение.
Движение по оси Z осуществляется следуюпщм образом. Включают фиксирующие муфты 35 - 38, а с электромагнитной фиксирующей муфты 19 снимают напряжение. В результате первое 6 и конечное 7 звенья стопорятся.
При включении двигателя 13 блок 17 совместно с гайкой 10 начинает вращаться против часовой стрелки, а выступ 28 на кольцевом сердечнике 27 препятствует вращению винта 9, в результате чего винт 9 совместфиксирующей муфтой 20, установленной в фигурной втулке 32 на опорах 33 и 34. При вращении двигателя 13 блок 17 совместно с механической ру5 кой 8 начинает вращаться против часовой стрелки, а двигатель 14 при этом слегка притормаживает движение. При включении двигателя 13 блок 17 совместно с механической рукой 8
О начинает вращаться против часовой стрелки, а двигатель 14 при этом слегка притормаживает движение. При включении двигателя 14 блок 17 совместно с механической рукой 8 начи 5 нает-вращаться по часовой стрелке, а двигатель 13 притормаживает движение троса 18. Таким образом, осуще- ствляется вращение механической руки 8 относительно оси Z.
20
25
Формула изобретения
Манипулятор, содержащий основание, на котором последовательно установлены звенья во взаимно перпендикулярных направляющих, на конечном звене установлена механическая рука с приводом, выполненным в виде винтового механизма, на винте которого
но с механической рукой 8 перемещает-30закреплено захватное устройство, и ся по оси Z вниз. Кольцевой сердеч-привод перемещения звеньев манипу- ник 27 при этом остается неподвиж-лятора, имеющий двигатели, размещенным за счет наличия фрикционного кон- основании, и трособлочную такта с крышкой 31. При включении
передачу, отличающийся
тем, что, с целью расширения кинематических возможностей, он снабжен фиксирующими муфтами, полумуфты которых установлены на смежных звеньях с возможностью фиксации их относительного положения, а две фиксирующие муфты установлены на механической руке, одна из которых установлена с возможностью фиксации относительного положения гайки винтового механизма и конечного звена манипу- . лятора, а другая - гайки и винта винтового механизма, при этом один из блоков трособлочной передачи жестко связан с гайкой винтового механизма механической руки, а трос охватывает своей центральной частью упомянутый блок и своими концами связан с выходньми элементами двигателей.
двигателя 14 блок 17 совместно с гайкой 10 начинает вращаться по часовой стрелке, в результате чего винт 9 с механической рукой 8 пере- мещается по оси Z вверх.
Вращение относительно оси Z меха- нической руки 8 осуществляется при подаче напряжения на электромагнитную фиксирующую муфту 20, в результате чего нарушается фрикционный контакт кольцевого сердечника 27 с крьш1кой 31 и возникает фрикционный контакт кольцевого сердечника 27 с гайкой 10 с образованием жесткой связи между винтом 9, гайкой .10 и кольцевым сердечником 27. Блок 17 совместно с гайкой 10 и винтон 9 получает возможность свободного вра- |щения относительно оси Z в опорах J1 и 12 совместно с электромагнитной
фиксирующей муфтой 20, установленной в фигурной втулке 32 на опорах 33 и 34. При вращении двигателя 13 блок 17 совместно с механической рукой 8 начинает вращаться против часовой стрелки, а двигатель 14 при этом слегка притормаживает движение. При включении двигателя 13 блок 17 совместно с механической рукой 8
начинает вращаться против часовой стрелки, а двигатель 14 при этом слегка притормаживает движение. При включении двигателя 14 блок 17 совместно с механической рукой 8 начинает-вращаться по часовой стрелке, а двигатель 13 притормаживает движение троса 18. Таким образом, осуще- ствляется вращение механической руки 8 относительно оси Z.
20
Формула изобретения
Манипулятор, содержащий основание, на котором последовательно установлены звенья во взаимно перпендикулярных направляющих, на конечном звене установлена механическая рука с приводом, выполненным в виде винтового механизма, на винте которого
закреплено захватное устройство, и привод перемещения звеньев манипу- лятора, имеющий двигатели, размеще основании, и трособлочную
передачу, отличающийся
закреплено захватное устройство, и привод перемещения звеньев манипу- лятора, имеющий двигатели, размещен основании, и трособлочную
тем, что, с целью расширения кинематических возможностей, он снабжен фиксирующими муфтами, полумуфты которых установлены на смежных звеньях с возможностью фиксации их относительного положения, а две фиксирующие муфты установлены на механической руке, одна из которых установлена с возможностью фиксации относительного положения гайки винтового механизма и конечного звена манипу- . лятора, а другая - гайки и винта винтового механизма, при этом один из блоков трособлочной передачи жестко связан с гайкой винтового механизма механической руки, а трос охватывает своей центральной частью упомянутый блок и своими концами связан с выходньми элементами двигателей.
/1-А
///////тт ///-////;
Фиг. г
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНЦЕВОЙ ЭФФЕКТОР С ШАРНИРНЫМ УЗЛОМ И ПРИВОД ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2016 |
|
RU2636853C2 |
| ПОДЪЕМНИК ДЛЯ ПОГРУЖЕНИЯ ИНВАЛИДА В БАССЕЙН | 1993 |
|
RU2063376C1 |
| Модуль манипулятора | 1987 |
|
SU1475778A1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПОРТСМЕНОВ | 2014 |
|
RU2556540C1 |
| Манипулятор | 1985 |
|
SU1321577A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКОЕ ЗАЖИМНОЕ УСТРОЙСТВО | 1991 |
|
RU2083345C1 |
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |
| Механическая рука | 1975 |
|
SU568346A3 |
| АППАРАТ ДЛЯ ЗАХВАТА И УДЕРЖИВАНИЯ ДИАГНОСТИЧЕСКИХ КАССЕТ | 2012 |
|
RU2628659C2 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
Изобретение относится к области машиностроения и может быть использовано в гибких- автоматических линиях и робототехнологических комплексах. Целью изобретения является расширение кинематических возможностей за счет обеспечения дополнительной степени подвижности при сокращении числа приводных двигателей. Манипулятор содержит основание 1, на котором последовательно установлены звенья 6 и 7 во взаимно перпендикулярных направляющих. На конечном звене 7 установлена механическая рука с возможностью осевого перемещения и вра- ;щения вокруг ее продольной оси. Перемещение ;звеньев и механической руки осуществляется от приводного механизма, выполненного в виде двух двигателей 13 и 14, установленных на на основании 1 по разные стороны от звена 6, троса 18, огибающего блоки 15 и 16, смонтированные на первом звене 6, и охватьюающего блок, жестко связанный с гайкой винтовой передачи механической руки, при этом концы троса 18 связаны с выходными элементами двигателей. Для осуществления перемещения первого звена 6 включаются фиксирующие муфты 37 и 38, расположенные соответственно на гайке и конечном звене 7, и один из двигателей 13 или 14. Для перемещения конечного звена 7 включают фиксирующие муфты 35 и 36, расположенные соответственно на гайке и первом звене 6, и двигатели 13 или 14 а с 3 2 fC X) 00 ел v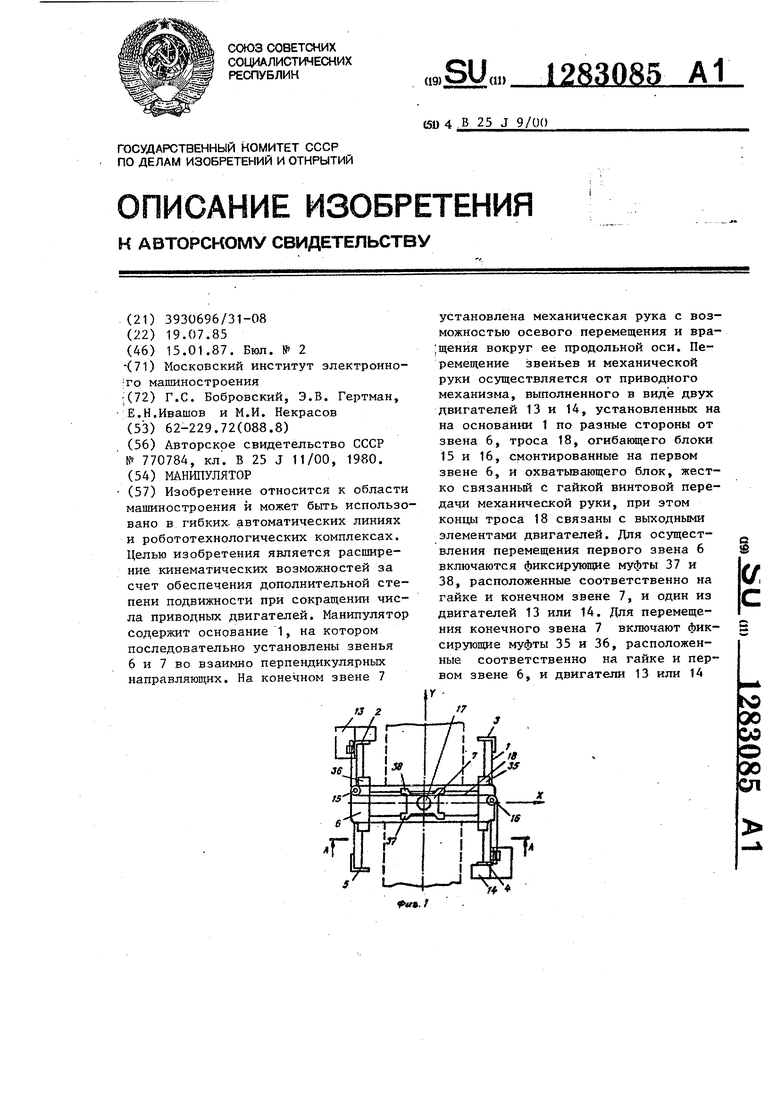
Составитель А, Ширяева Редактор И. Рыбченко Техред Л.Сердюкова Корректор М. 1аксимишинец
Заказ 7344/14 Тираж 949Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, , Раушская наб., д. 4/5
Производственно-полиграсЬическое предприятие, г. Ужгород, ул. Проектная, 4
| Манипулятор | 1978 |
|
SU770784A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
