(54) ЭЛЕКТРОМАГНИТНЫЙ ЗАХВАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для изделий со штырем с фигурным концом | 1989 |
|
SU1659346A1 |
| Электромагнитный схват | 1985 |
|
SU1296407A1 |
| Магнитно-вакуумный захват | 1985 |
|
SU1366396A1 |
| Устройство для сборки радиальных роликовых подшипников | 1990 |
|
SU1732046A1 |
| Командоаппарат | 1984 |
|
SU1399832A1 |
| Устройство для изготовления гиперболоидных контактных узлов Карташева В.В. | 1987 |
|
SU1554058A1 |
| МАНИПУЛЯТОР ДЛЯ ПОДАЧИ ДЕТАЛЕЙ | 1973 |
|
SU394959A1 |
| Командоаппарат | 1984 |
|
SU1399833A1 |
| ЛОВИТЕЛЬ ЛИФТА | 2013 |
|
RU2607906C2 |
| Автомат для изготовления седлообразных катушек | 1977 |
|
SU736190A1 |
Изобретение относится к машиностроению и может быть использовано в захватах для манипуляторов, автооператоров и других устройствах для подъема и перемещения грузов.
Известен захват для ферромагнитных деталей, выполненный в виде электромагнита, помещенного в корпусе и снабженного выключателем питания катушки |1.
Недостатком известного захвата является то, что при захвате груз дезориентируется и теряет точное положение, поэтому нельзя использовать при точном подъеме и перемещении грузов.
Цель изобретения - повышение точности захвата и установки груза.
Цель достигается тем, что захват снабжен стаканом и кулачком, причем электромагнит размещен в стакане, установленном в корпусе с возможностью осевого перемещения и подпружинен относительно него, а к стакану жестко прикреплен кулачок, контактирующий с выключателем цепи питания электромагнита.
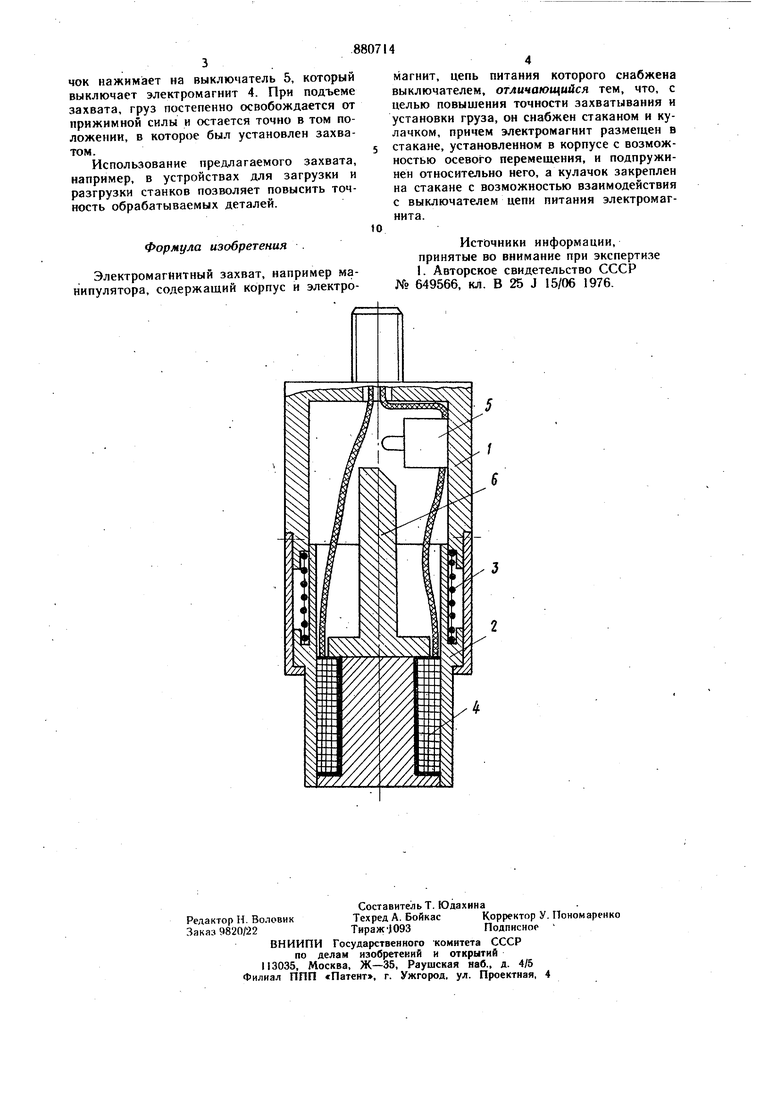
На чертеже изображен предлагаемый захват, общий вид, разрез.
Электромагнитный захват содержит цилиндрический разъемный корпус 1, в котором установлен с возможностью осевого перемещения стакан 2. Между корпусом 1 и стаканом 2 установлена пружина 3. В стакане 2 расположен электромагнит 4, соединенный с выключателем 5, жестко закрепленным на корпусе 1. К стакану 2 прикреплен плоский кулачок 6, взаимодействующий с выключателем 5 электромагнита 4.
Захват работает следующим образом.
Для подъема груза захват подводят к поверхности груза и опускают вниз до соприкосновения нижней поверхности захвата с грузом. Прилагая усилие в осевом направлении вниз, сжимают пружину 3, при этом стакан с электромагнитом 4 перемещаtS- ется в корпусе 1 вверх. Вместе со стаканом 2 перемещается плоский кулачок 6, который нажимает на выключатель 5. Выключатель 5 включает электромагнит 4. При этом груз прикрепляется к сердечнику элеетромагнита. Далее при подъеме корпуса 1 пружина 3 возвращается в исходное положение, и груз переносится в требуемое место.
Для установки груза захват опускается вниз, сжимается пружина 3 и плоский кулачок нажимает на выключатель 5, который выключает электромагнит 4. При подъеме захвата, груз постепенно освобождается от прижнмной силы и остается точно в том положении, в которое был установлен захватом. Использование предлагаемого захвата, например, в устройствах для загрузки и разгрузки станков позволяет повысить точность обрабатываемых деталей. Формула изобретения Электромагнитный захват, например манипулятора, содержащий корпус и электромагнит, цепь питания которого снабжена выключателем, отличающийся тем, что, с целью повышения точности захватывания и установки груза, он снабжен стаканом н кулачком, причем электромагнит размещен в стакане, установленном в корпусе с возможностью осевого перемещения, н подпружинен относительио него, а кулачок закреплен на стакане с возможностью взаимодействия с выключателем цепи питания электромагнита. Источники информации, принятые во внимание при экспертизе 1 Авторское свидетельство СССР № 649566, кл. В 25 J 15/06 1976.
