(Л
315
конечниками (поясами). Верхний нако- кечник 4 состоит из фланца 6, на котором с возможностью перемещения в радиальном направлении установлены четыре KpoHDJTeHH 7. На кронштейнах 7 с помощью гаек 8 закреплены оси 9, на которых установлены спаренные ролики 10, поджатые друг к другу пружинами 11. Кронштейны 7 снабжены клинья ми 12, воздействуя на которые конической щайбой 13, поджимаемой болтами 14 к фланцу 6, можно установить ролики 10 относительно наружной поверхности секции 2 в такое положение, чтобы угол, образованный лучами, проходящими через середину оси 9 и середину рабочей поверхности ролика 10, был меньше либо равен углу самоторможения. Нижний наконечник 5 состоит из фланца 15, на котором с возможностью перемещения в радиальном на
0
правлении установлены четыре кронштейна 16. На кронштейнах 16 с помощью гаек 17 закреплены оси 18, на которых установлены спаренные ролики 19, отжимаемые друг от друга пружинами 20. Кронштейны 16 снабжены клиньями 21, воздействуя на которые коническим толкателем 22, перемещающимся по шпильке 23 с помощью гайки 24, можно установить ролики 19 относительно внутренней поверхности секции в такое положение, чтобы угол, образованный лучами, проходящими через середину 5 оси 18 и середину рабочей поверхности ролика 19, бып меньше либо равен углу самоторможения. После сборки телескопа болтами 14 или гайкой 24 обеспечивается заданный прижим спаренных роликов 10 и роликов 19 относительно направляющих. 1 з.п. ф-лы, 4 ил.
0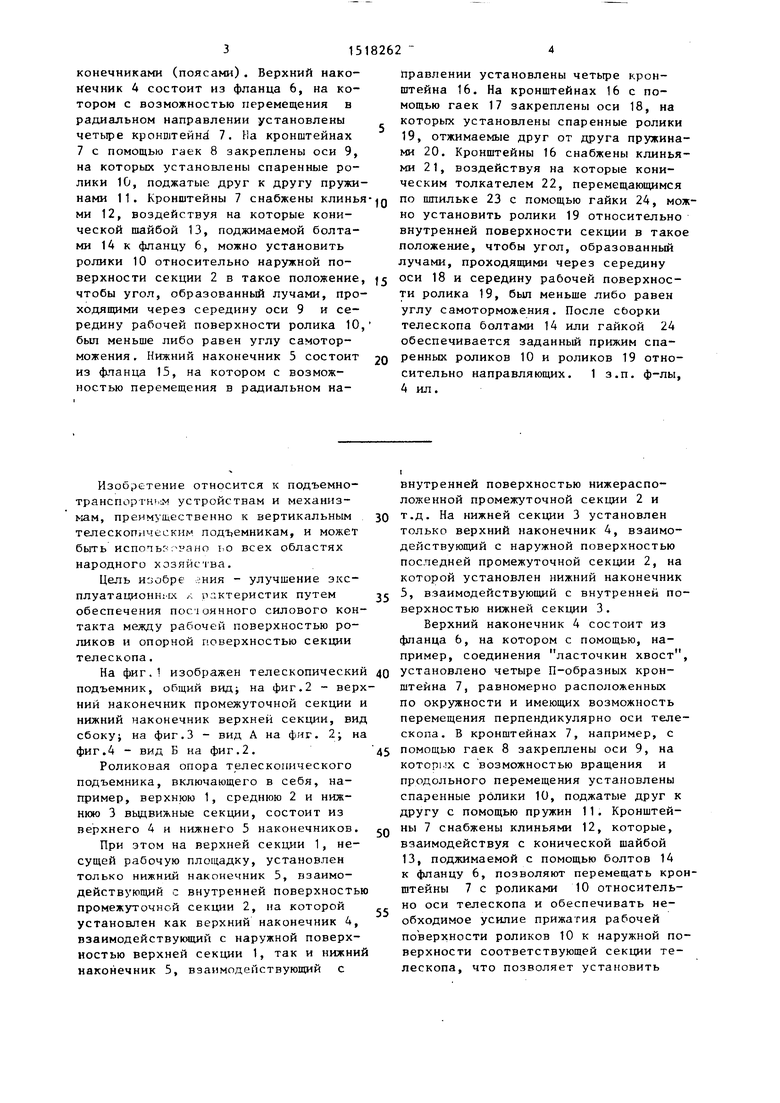
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 2001 |
|
RU2200359C1 |
| ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ ВЕТРА И ВОЛН | 2003 |
|
RU2254494C2 |
| УСТРОЙСТВО ДЛЯ ВЫКОПКИ ЛАКРИЧНОГО КОРНЯ | 1998 |
|
RU2129356C1 |
| Устройство для регулировки и фиксации положения радиолокационной антенны | 1981 |
|
SU1841241A1 |
| СУШИЛКА РОЛИКОВАЯ СЕКЦИОННАЯ С СОПЛОВЫМИ КОРОБАМИ, ПРИВОДОМ И МЕХАНИЗМАМИ ЗАГРУЗКИ И ВЫГРУЗКИ С ЛЕНТОЧНЫМ КОНВЕЙЕРОМ | 2009 |
|
RU2430004C1 |
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
| ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ ТЕКУЧЕЙ СРЕДЫ (ВАРИАНТЫ) | 2006 |
|
RU2329400C1 |
| МАШИНА ДЛЯ КОНТУРНОЙ ЧЕКАНКИ ПОБЕГОВ ВИНОГРАДНОЙ ЛОЗЫ | 2024 |
|
RU2839884C1 |
| МАШИНА ДЛЯ ДОБЫЧИ ЛАКРИЧНОГО СЫРЬЯ | 1999 |
|
RU2163431C1 |
| ПОДЪЕМНИК ТЕЛЕСКОПИЧЕСКИЙ | 2022 |
|
RU2785824C1 |

Изобретение относится к подъемно-транспортным устройствам и механизмам, преимущественно к вертикальным телескопическим подъемникам. Цель изобретения - улучшение эксплуатационных характеристик путем обеспечения постоянного силового контакта между рабочими поверхностями ходовых роликов и направляющей. Каждая выдвижная секция снабжена верхним 4 и нижним 5 наконечниками (поясами). Верхний наконечник 4 состоит из фланца 6, на котором с возможностью перемещения в радиальном направлении установлены четыре кронштейна 7. На кронштейнах 7 с помощью гаек 8 закреплены оси 9, на которых установлены спаренные ролики 10, поджатые друг к другу пружинами 11. Кронштейны 7 снабжены клиньями 12, воздействуя на которые конической шайбой 13, поджимаемой болтами 14 к фланцу 6, можно установить ролики 10 относительно наружной поверхности секции 2 в такое положение, чтобы угол, образованный лучами, проходящими через середину оси 9 и середину рабочей поверхности ролика 10, был меньше либо равен углу самоторможения. Нижний наконечник 5 состоит из фланца 15, на котором с возможностью перемещения в радиальном направлении установлены четыре кронштейна 16. На кронштейнах 16 с помощью гаек 17 закреплены оси 18, на которых установлены спаренные ролики 19, отжимаемые друг от друга пружинами 20. Кронштейны 16 снабжены клиньями 21, воздействуя на которые коническим толкателем 22, перемещающимся по шпильке 23 с помощью гайки 24, можно установить ролики 19 относительно внутренней поверхности секции в такое положение, чтобы угол, образованный лучами, проходящими через середину оси 18 и середину рабочей поверхности ролика 19, был меньше либо равен углу самоторможения. После сборки телескопа болтами 14 или гайкой 24 обеспечивается заданный прижим спаренных роликов 10 и роликов 19 относительно направляющих. 1 з.п. ф-лы, 4 ил.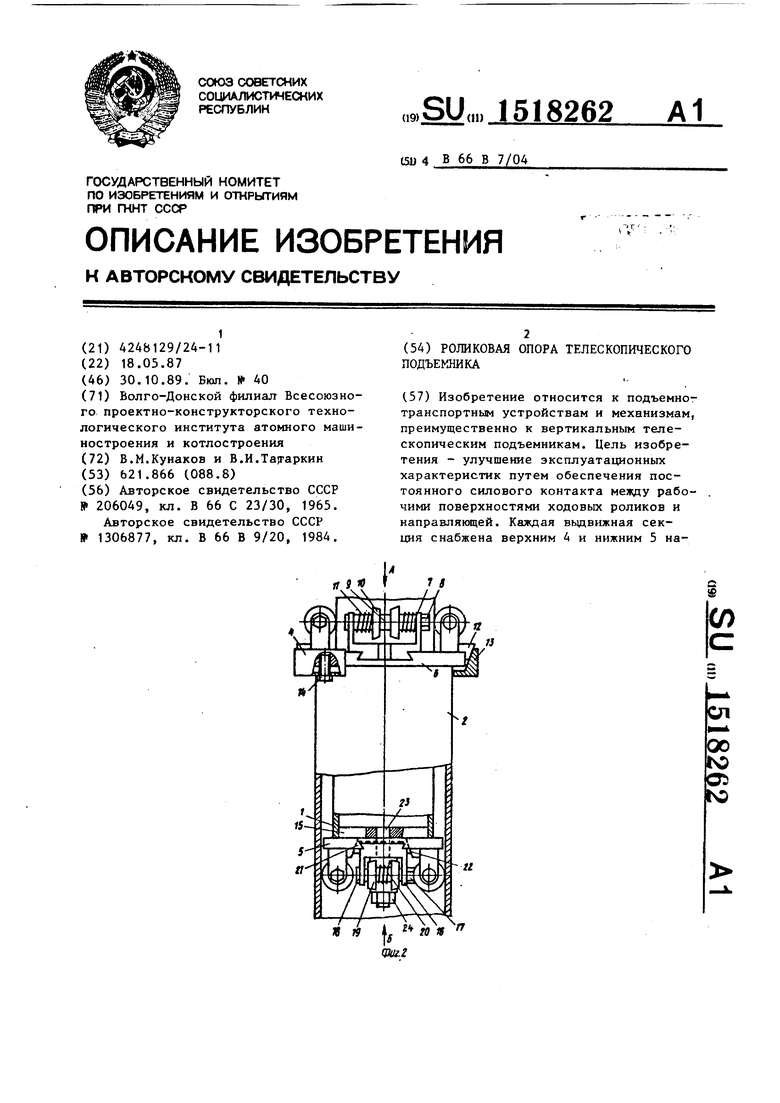
Изобретение относится к подъемно- транспор 1 HbuM устройствам и механизмам, преимущественно к вертикальным телескопическим подъемникам, и может быть испотьгт. Рано ьо всех областях народного хозяйства.
Цель изобре зния - улучшение экс- плуатационн1 К /. рлктеристик путем обеспечения пос 1оянного силового контакта между рабочей поверхностью роликов и опорной поверхностью секции телескопа.
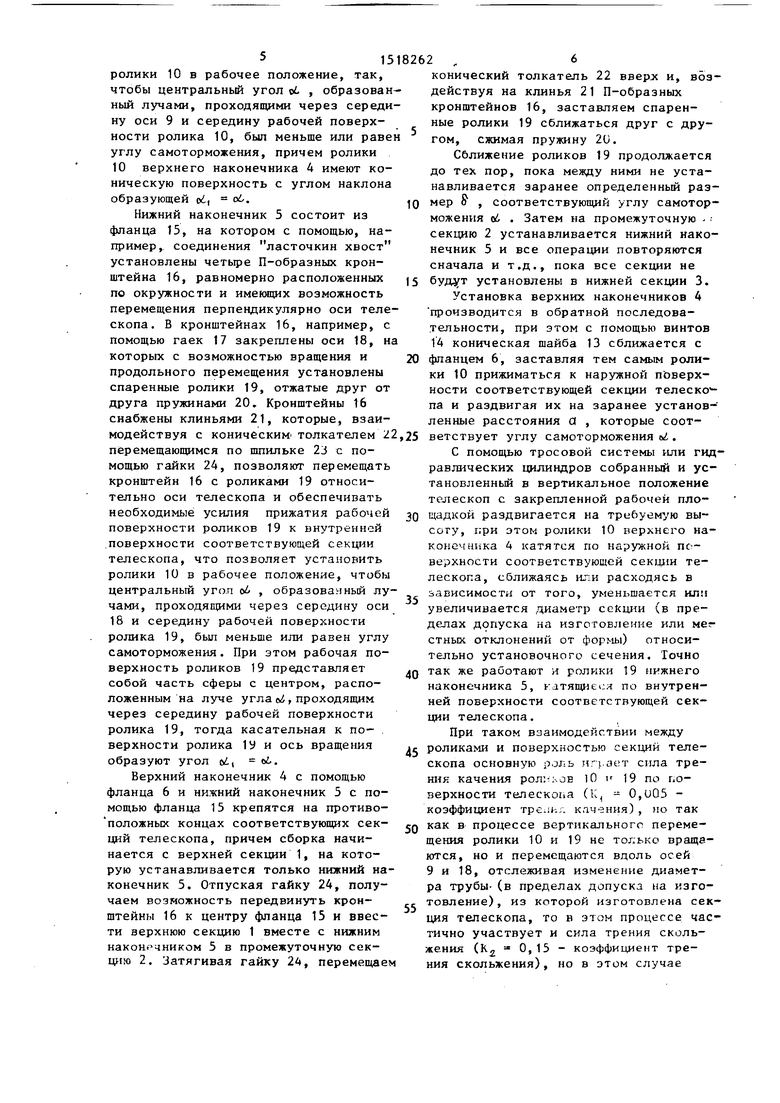
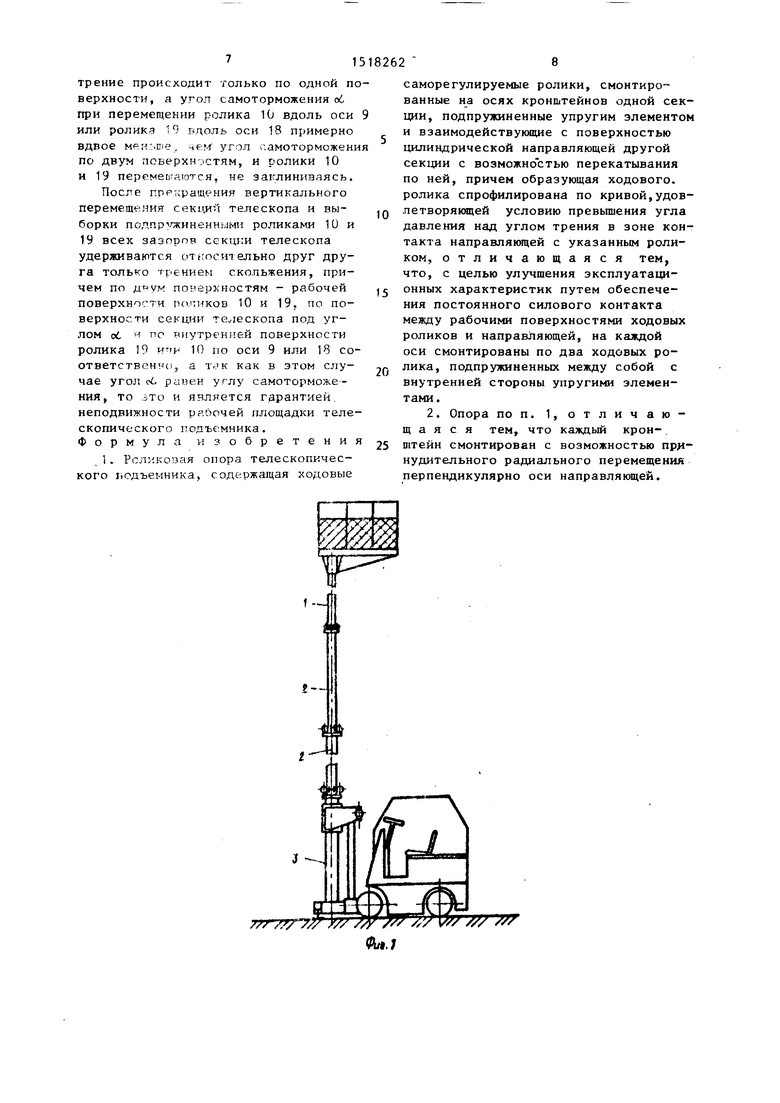
На фиг.1 изображен телескопический подъемник, общий вид; на фиг.2 - верхний наконечник промежуточной секции и нижний наконечник верхней секции, вид сбокуJ на фиг.3 - вид А на фиг. 2; на фиг.4 - вид Б на фиг,2.
Роликовая опора телескопического подъемника, включающего в себя, например, верхнюю 1, среднюю 2 и нижнюю 3 вьщвижные секции, состоит из верхнего 4 и нижнего 5 наконечников.
При этом на верхней секции 1, несущей рабочую площадку, установлен только нижний наконечник 5, взаимо- действую1дий с внутренней поверхностью промежуточной секции 2, на которой установлен как верхний наконечник 4, взаимодействующий с наружной поверхностью верхней секции 1, так и нижний накойечник 5, взаимодействующий с
0
5
0
5
0
5
внутренней поверхностью нижерасположенной промежуточной секции 2 и т.д. На нижней секции 3 установлен только верхний наконечник 4, взаимодействующий с наружной поверхностью последней промежуточной секции 2, на которой установлен нижний наконечник 5, взаимодействующий с внутренней поверхностью нижней секции 3.
Верхний наконечник 4 состоит из фланца 6, на котором с помощью, например, соединения ласточкин хвост, установлено четыре П-образных кронштейна 7, равномерно расположенных по окружности и имеющих возможность перемещения перпендикулярно оси телескопа. В кронштейнах 7, например, с помощью гаек 8 закреплены оси 9, на которих с возможностью вращения и продольного перемещения установлены спаренные ролики 10, поджатые друг к другу с помощью пружин 11. Кронштейны 7 снабжены клиньями 12, которые, взаимодействуя с конической шайбой 13, поджимаемой с помощью болтов 14 к фланцу 6, позволяют перемещать кронштейны 7 с роликами 10 относительно оси телескопа и обеспечивать необходимое усилие прижатия рабочей поверхности роликов 10 к наружной поверхности соответствующей секции телескопа, что позволяет установить
ролики 10 в рабочее положение, так, чтобы центральный угол о , образованный лучами, проходящими через середину оси 9 и середину рабочей поверхности ролика 10, был меньше или равен углу самоторможения, причем ролики 10 верхнего наконечника 4 имеют коническую поверхность с углом наклона образующей od, об.
Нижний наконечник 5 состоит из фланца 15, на котором с помощью, например, соединения ласточкин хвост установлены четыре П-образных кронштейна 16, равномерно расположенных по окружности и имеющих возможность перемещения перпендикулярно оси телескопа. В кронштейнах 16, например, с помощью гаек 17 закреплены оси 18, на которых с возможностью вращения и продольного перемещения установлены спаренные ролики 19, отжатые друг от друга пружинами 20, Кронштейны 16 снабжены клиньями 21, которые, взаи30
35
40
модействуя с коническим толкателем 22,25 ветствует углу самоторможенияв. пперемещающимся по шпильке 23 с помощью гайки 24, позволяют перемещать кронштейн 16 с роликами 19 относительно оси телескопа и обеспечивать необходимые усилия прижатия рабочей поверхности роликов 19 к внутренней .поверхности соответствующей секции телескопа, что позволяет установить ролики 10 в рабочее положение, чтобы центральный угол oi , образованный лучами, проходящими через середину оси 18 и середину рабочей поверхности ролика 19, бьш меньше или равен углу самоторможения. При этом рабочая поверхность роликов 19 представляет собой часть сферы с центром, расположенным на луче угла cvi, проходящим через середину рабочей поверхности ролика 19, тогда касательная к по- . верхности ролика 19 и ось вращения образуют угол ei, oi.
Верхний наконечник 4 с помощью фланца 6 и нижний наконечник 5 с помощью фланца 15 крепятся на противо- положных концах соответствующих секций телескопа, причем сборка начинается с верхней секции 1, на которую устанавливается только нижний наконечник 5. Отпуская гайку 24, получаем возможность передвинуть крон- щтейны 16 к центру фланца 15 и ввести верхнюю секцию 1 вместе с нижним наконечником 5 в промежуточную секцию 2. Затягивая гайку 24, перемещаем
С помощью тросовой системы или равлических цилиндров собранный и тановленный в вертикальное положе телескоп с закрепленной рабочей п щадкой раздвигается на трь;буем:, ю соту, при этом ролики 10 верхнего конечника 4 катятся по наружной п верхности соответствующей сектдли лескопа, сближаясь или расходясь зависимости от того, уменьшается увеличивается диаметр секции (в п делах допуска на изготовление или стных отклонений от формы) относ тельно установочного сечения. Точ так же работают и ролики 19 нижне наконечника 5, катящиеся по внутр ней поверхности соответствующей с ции телескопа.
При таком взаимодействии между дс роликами и поверхностью секций те скопа основную роль игьает сила т ния качения lO и 19 по по верхности TanecKoiia (К, - 0,U05 - коэффициент Tpeiii.;. кач эния) , но т как в процессе вертикального пере щения ролики 10 и 19 не только вр ются, но и перемещаются вдоль осе 9 и 18, отслеживая изменение диам ра трубы-(в пределах допуска на и товление), из которой изготовлена ция телескопа, то в этом процессе тично участвует и сила трения ско жения (К 0,15 - коэффициент тр ния скольжения), но в этом случае
50
55
конический толкатель 22 вверх и, воздействуя на клинья 21 П-образных кронштейнов 16, заставляем спаренные ролики 19 сближаться друг с другом, сжимая пружину 2U.
Сближение роликов 19 продолжается до тех пор, пока между ними не устанавливается заранее определенный размер , соответствующий углу самоторможения oi . Затем на промежуточную - секцию 2 устанавливается нижний наконечник 5 и все операции повторяются сначала и т.д., пока все секции не установлены в нижней секции 3.
Установка верхних наконечников 4 производится в обратной последовательности, при этом с помощью винтов 14 коническая шайба 13 сближается с фланцем 6, заставляя тем самым ролики 10 прижиматься к наружной пЬверх- ности соответствующей секции телеско - па и раздвигая их на заранее установ- ленные расстояния а , которые соот
0
5
0
5 ветствует углу самоторможенияв.
С помощью тросовой системы или гидравлических цилиндров собранный и установленный в вертикальное положение телескоп с закрепленной рабочей площадкой раздвигается на трь;буем:, ю высоту, при этом ролики 10 верхнего наконечника 4 катятся по наружной пс верхности соответствующей сектдли телескопа, сближаясь или расходясь в зависимости от того, уменьшается или увеличивается диаметр секции (в пределах допуска на изготовление или мег стных отклонений от формы) относительно установочного сечения. Точно так же работают и ролики 19 нижнего наконечника 5, катящиеся по внутренней поверхности соответствующей секции телескопа.
При таком взаимодействии между с роликами и поверхностью секций телескопа основную роль игьает сила трения качения lO и 19 по поверхности TanecKoiia (К, - 0,U05 - коэффициент Tpeiii.;. кач эния) , но так как в процессе вертикального перемещения ролики 10 и 19 не только вращаются, но и перемещаются вдоль осей 9 и 18, отслеживая изменение диаметра трубы-(в пределах допуска на изготовление), из которой изготовлена секция телескопа, то в этом процессе частично участвует и сила трения скольжения (К 0,15 - коэффициент трения скольжения), но в этом случае
0
5
трение происходит только по одной поверхности, а угол самоторможения об при перемещении ролика 10 вдоль оси или ролика 19 вдоль оси 18 примерно вдвое мен.лше , чем угол самоторможени по двум поверхн . стям, и ролики 10 и 19 перемеьтя.гатс.я, не заклиниваясь. После прркращения вертикального перемещения секций телескопа и выборки подпр иненнымн роликами 10 и 19 всех зазоров секции телескопа удерживаются относительно друг друга только трением скольжения, причем по двум поверхностям - рабочей поверхности роликов 10 и 19, по поверхности секции TBoieскопа под углом oi. и по внутренней поверхности ролика 19 ипи 10 по оси 9 или 18 соответственно, а Тг;1к как в этом случае угол об равен углу самоторможения, то это и является гарантией, неподвижности рнбочей площадки телескопического подъемника. Формула изобретения
W
/ /v .
саморегулируемые ролики, смонтированные на осях кронштейнов одной секции, подпружиненные упругим элементом и взаимодействукнцие с поверхностью цилиндрической направляющей другой секции с возможно стью перекатывания по ней, причем образующая ходового, ролика спрофилирована по кривой,удовлетворяющей условию превышения угла давления над углом трения в зоне контакта направляющей с указанным роликом, отличающаяся тем, что, с целью улучшения эксплуатационных характеристик путем обеспечения постоянного силового контакта между рабочими поверхностями ходовых роликов и направляющей, на каждой оси смонтированы по два ходовых ролика, подпружиненных между собой с внутренней стороны упругими элементами.
/4
7Д
1-di.
22
/J
/4
/4с
Ф(/г.З ВидБ
21
| ТЕЛЕСКОПИЧЕСКАЯ БАШНЯ ГРУЗОПОДЪЕМНОГОКРАНА | 0 |
|
SU206049A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Подъемное устройство | 1984 |
|
SU1306877A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
