:л
X)
N3
00
Изобретение относится к подъемно- транспортному машиностроению, в частности к навесным приспособлениям вилочных погрузчиков, и может быть использовано при переработке роликов с суровой тканью в ткацком производстве .
Цель изобретения - расширение функциональньпс возможностей путем обеспечения боковой загрузки.
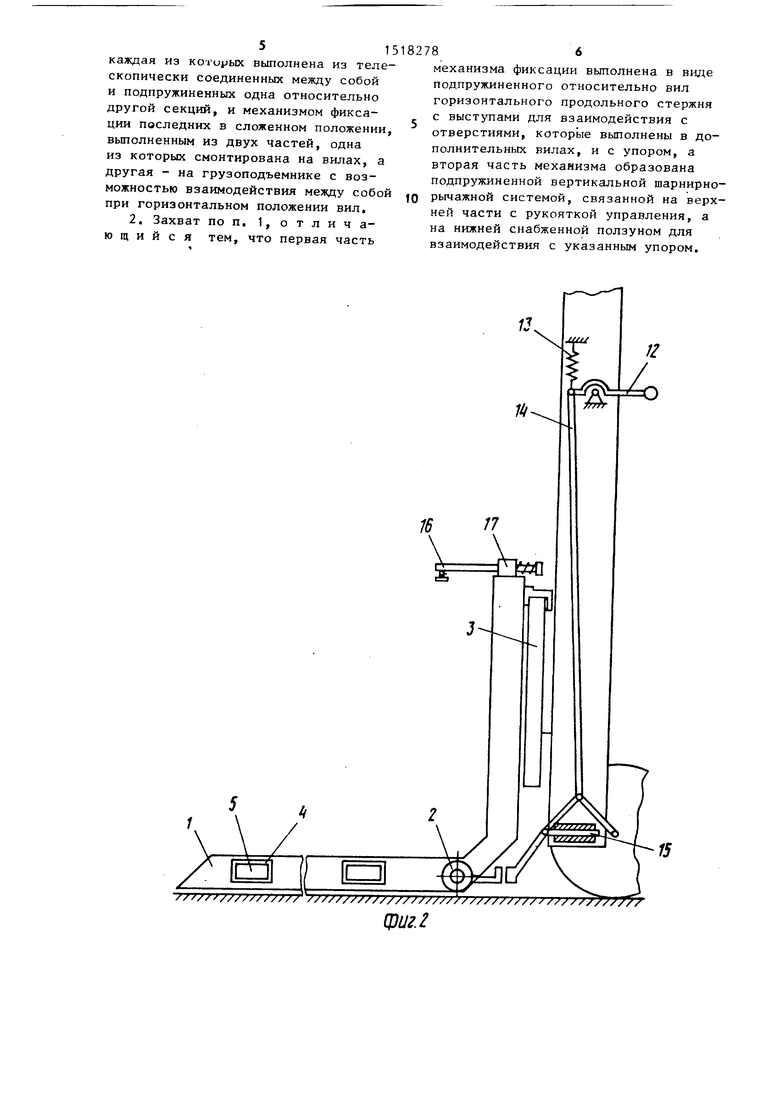
На фиг, 1 изображен захват, общий вид; на фиг, 2 - то же, вид сбоку; на фиг. 3 - то же, в нерабочем положенииi на фиг, 4 - разрез А-А на фиг, 1j на фиг, 5 - захват в работе, общий вид.
Захват содержит грузонесущую часть вил 1, которая шарнирчо установлена на оси 2 каретки 3, причем в грузонесущей части вил 1 иоопуще- ны две полые связи 4, установленные перпендикулярно оси погрузчика,
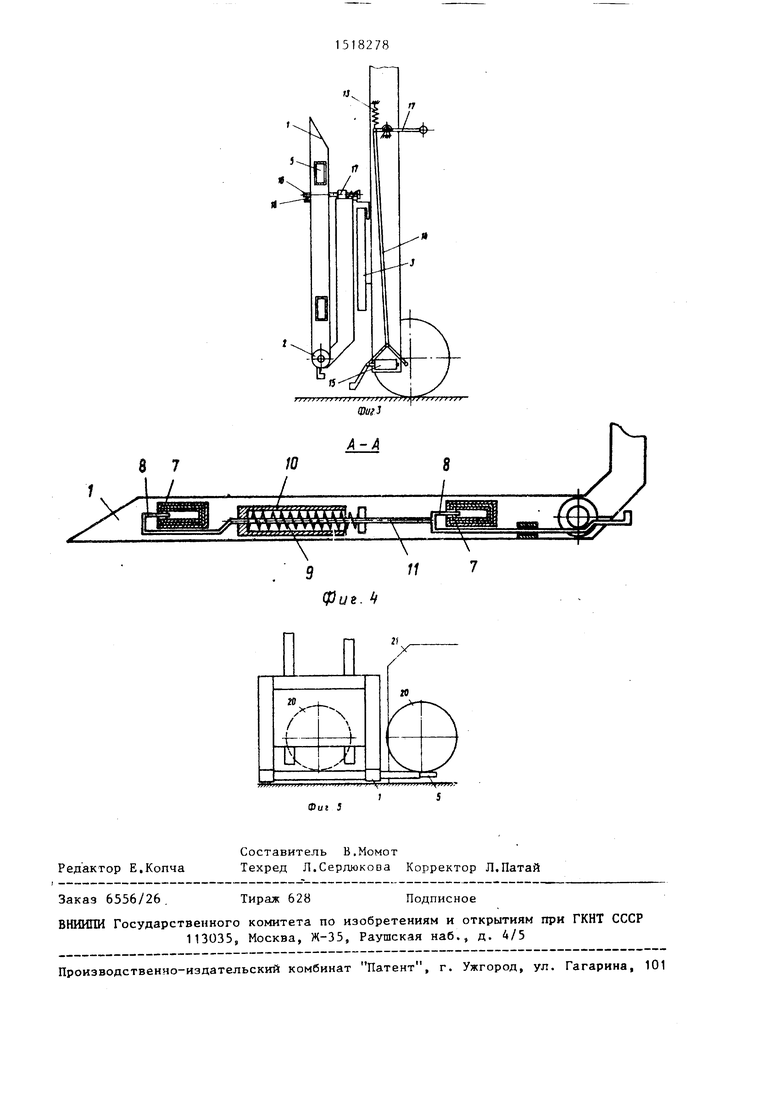
В полых связях 4 с обеих сторон вмонтированы группы телескопических секций 5, состоящих из трех частей, подпружиненньсх пружинами 6 сжатия, На боковой поверхности каждой части телескопических секций имеются отвертия 7, которые в нерабочем положении совпадают друг с другом, образуя совмещенное отверстие.
Захват содержит механизм фиксации телескопических секций в сложенном положении, состоящий из стержня 8, взаимодействующего с пружиной 9 и установленного в корпусе 10 с возможностью возвратно-поступательного пермещения.
Один конец стержня 8 входит в сов мещенное отверстие 7 телескопических секций, а другой конец стержня 8 связан с тягой II, взаимодействующей с приводом управления механизмом фиксации, состоящим из ручки 12 привода одним концом связанной с пружиной 13 растяжения, а другим концом - с рычагом 14, шарнирно связанным с ползуном 15,
Для фиксации грузонесущей части вил 1 в вертикальном положении имеется запорное устройство, состоящее из штыря 16, скользящего во втулке 17, и подпружиненной защелки 18, Запорное устройство установлено на каретке 3. На грузонесущей части имеются отверстия 19, в которое при нерабочем положении вил вводится штырь 16 и фиксируется защелкой 18.
5
0
5 о
„ 5
5
5
Захват работает следующим образом.
По окончании наработки рулона 20 ткани к ткацкому станку 21 подъезжает погрузчик так, чтобы грузонесущая часть вил 1 располагалась в непосредственной близости и параллельно рулону 20. Затем поднятием ручки 12 и ее поворотом вокруг оси опускается рычаг 14, который взаимодействует с ползуном 15, заставляя его вьщви- нуться вперед до взаимодействия с тягой 11. Последняя, сжимая пружину 9, освобождает стержень 8 из отверстий 7 каждой группы телескопических секций 5, которые под действием пружин 6 выдвигаются под рулон 20,
Затем освобождается рулон 20 и по телескопическим секциям перекатывается на грузонесу|цую часть вил 1 ,
Возвращаются телескопические секции 5 в исходное положение вручную до совмещения отверстий 7 всех частей секций и входа в него подпружиненного стержня 8 механизма фиксации,
Загрузку рулонов 20 на грузонесущую часть возможно производить как слева, так и справа без разворота погрузчика.
Затем рулон 20 транспортируется на погрузчике в браковочное производство, где с помощью сталкивателя (не показан его укладьшают на стойку для хранения или на гравитационный стеллаж для заправки на раскатное устройство бра1ковочной линии.
При движении погрузчика по цеху без груза грузонесущая часть вил устанавливается в вертикальное положение и фиксируется защелкой 18 запорного устройства.
Формула изобретения
1. Захват к погрузчику, содержащий вилы, навешиваемые на каретку грузоподъемника последнего с возможностью поворота в вертикальной продольной плоскости и фиксации в вертикальном положении запорным устройством, о т- личающийся .тем, что, с целью расширения функциональных возможностей путем обеспечения боковой загрузки, он снабжен смонтированными на вилах с возможностью выдвижения в обе стороны в поперечном направлении дополнительными вилами.
каждая из которых вьшолнена из телескопически соединенных между собой и подпружиненных одна относительно другой секций, и механизмом фиксации последних в сложенном положении, выполненным из двух частей, одна из которых смонтирована на вилах, а другая - на грузоподъемнике с возможностью взаимодействия между собой при горизонтальном положении вил,
2. Захват по п, 1, о т л и ч а- ю щ и и с я тем, что первая часть
механизма фиксации вьшолнена в виде подпружиненного относительно вил горизонтального продольного стержня с выступами для взаимодействия с отверстиями, которые выполнены в дополнительных вилах, и с упором, а вторая часть механизма образована подпружиненной вертикальной шарнирно- рычажной системой, связанной на верхней части с рукояткой управления, а на нижней снабженной ползуном для взаимодействия с указанным упором.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемник погрузчика | 1985 |
|
SU1296507A1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО К ВИЛОЧНОМУ ПОГРУЗЧИКУ | 1971 |
|
SU312825A1 |
| Грузоподъемник крана-штабелера | 1990 |
|
SU1733347A1 |
| ВИЛОЧНЫЙ ПОГРУЗЧИК | 1991 |
|
RU2025462C1 |
| Навесное грузозахватное устройство погрузчика для транспортировки рулонных материалов | 1981 |
|
SU1028595A1 |
| Устройство для настилания полотен на закройных стол | 1978 |
|
SU743936A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ВИЛОЧНОГО ПОГРУЗЧИКА | 1991 |
|
RU2011636C1 |
| Захват к погрузчику для группы грузов прямоугольной формы | 1987 |
|
SU1458312A1 |
| ГРУЗОВАЯ КАРЕТКА ГРУЗОПОДЪЕМНИКА ПОГРУЗЧИКА | 2024 |
|
RU2828413C1 |
| Захват к погрузчику | 1990 |
|
SU1782932A1 |
Изобретение относится к подъемно-транспортному машиностроению, в частности к погрузчикам для транспортировки рулонного материала. Цель изобретения - расширение функциональных возможностей путем обеспечения боковой загрузки. Захват к погрузчику содержит вилы 1, которые шарнирно установлены на оси 2 каретки 3, причем в вилах пропущены две полые связи 4, в которые вмонтированы группы телескопических подпружиненных пружинами 6 секций 5. На боковых поверхностях каждой части секций 5 имеются отверстия, которые в нерабочем положении совпадают друг с другом, образуя совмещенное отверстие. Захват содержит механизм фиксации телескопических секций, состоящий из стержня, взаимодействующего с пружиной и установленного в корпусе с возможностью возвратно-поступательного перемещения. Один конец стержня входит в совмещенное отверстие секций 5, а другой конец связан с тягой 11, взаимодействующей с ползуном привода управления механизма фиксации. Грузонесущая часть вил 1 установлена с возможностью фиксации в вертикальном положении с помощью запорного устройства. 1 з.п. ф-лы, 5 ил.
/J.
Ц)иг.1
А-А
W
,7.ЛД.ТДДД/
v
.911
Фие.
Редактор Е.Копча
Составитель В.Момот
Техред Л.Сердюкова Корректор Л.Патай
Заказ 6556/26.
Тираж 628
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
ФигЗ
Подписное
| СОШНИК К ПОСАДОЧНОЙ МАШИНЕ | 0 |
|
SU301117A1 |
| Горный компас | 0 |
|
SU81A1 |
