Фиг. 1
Изобретение относится к грузовым захватам и может быть использовано для механизированной перегрузки грузов, допускающих их сжатие.
Известен захват к погрузчику, содержащий вертикально расположенные вилы (лапы), смонтированные в горизонтальных направляющих с возможностью изменения расстояния между ними и параллельного перемещения с помощью привода. Работа захвата основана на принципе горизонтального (бокового) сжатия груза, но он не имеет возможности вертикального сжатия груза, в то время как это необходимо во многих случаях при перегрузке грузов, особенно на судах в море.
Известен также захват к погрузчику, содержащий смонтированные на каретке последнего с возможностью изменения расстояния по горизонтали боковые захваты для груза и установленную с возможностью вертикального перемещения горизонтальную прижимную плиту и приводы указанных перемещений.
Однако при поперечном перемещении захватных органов этот захват не обеспечивает сохранность пакета груза.
Целью изобретения является расширение функциональных возможностей захвата путем обеспечения поперечного перемещения груза.
Указанная Цель достигается тем, что захват к погрузчику, содержащий смонтированные на каретке последнего с возможностью изменения расстояния по горизонтали боковые захваты для груза и установленную с возможностью вертикального перемещения горизонтальную прижимную плиту и приводы указанных перемещений снабжен смонтированной на нижней поверхности прижимной плиты с возможностью подпружиненного поперечного горизонтального перемещения по ней рамой для взаимодействия с грузом, причем боковые захваты смонтированы с возможностью совместного поперечного перемещения. Прижимная плита смонтирована на каретке шарнирно с возможностью поворота на 90° в вертикальной продольной плоскости. Кроме того, прижимная плита выполнена съемной.
Наряду с возможностью бокового и вертикального сжатия груза предлагаемый захват обеспечивает возможность поперечного перемещения груза благодаря смонтированной на нижней поверхности прижимной плиты с возможностью горизонтального перемещения раме для взаимодействия с грузом. При опускании прижимной плиты рама прижимается к верхней поверхности груза, а при поперечном перемещении боковых захватов рама взаимодействует с грузом и смещается вместе с ним, в то время как прижимная плита остается неподвижной. После снятия вертикального усилия сжатия рама за счет усилия пружин возвращается в среднее положение. Смонтированная на каретке шарнирно с возможностью поворота на 90° в верти0 кальной продольной плоскости прижимная плита создает возможность работы захвата при ограниченном пространстве между грузом и подволоком грузового помещения. Съемная прижимная плита, кроме того,
5 уменьшает массу захвата и делает его более ремонтопригодным.
За счет расширения функциональных возможностей захвата путем поперечного перемещения груза повышается про0 изводительность операций, а за счет более плотной установки груза в штабель увеличивается грузовместимость грузовых помещений.
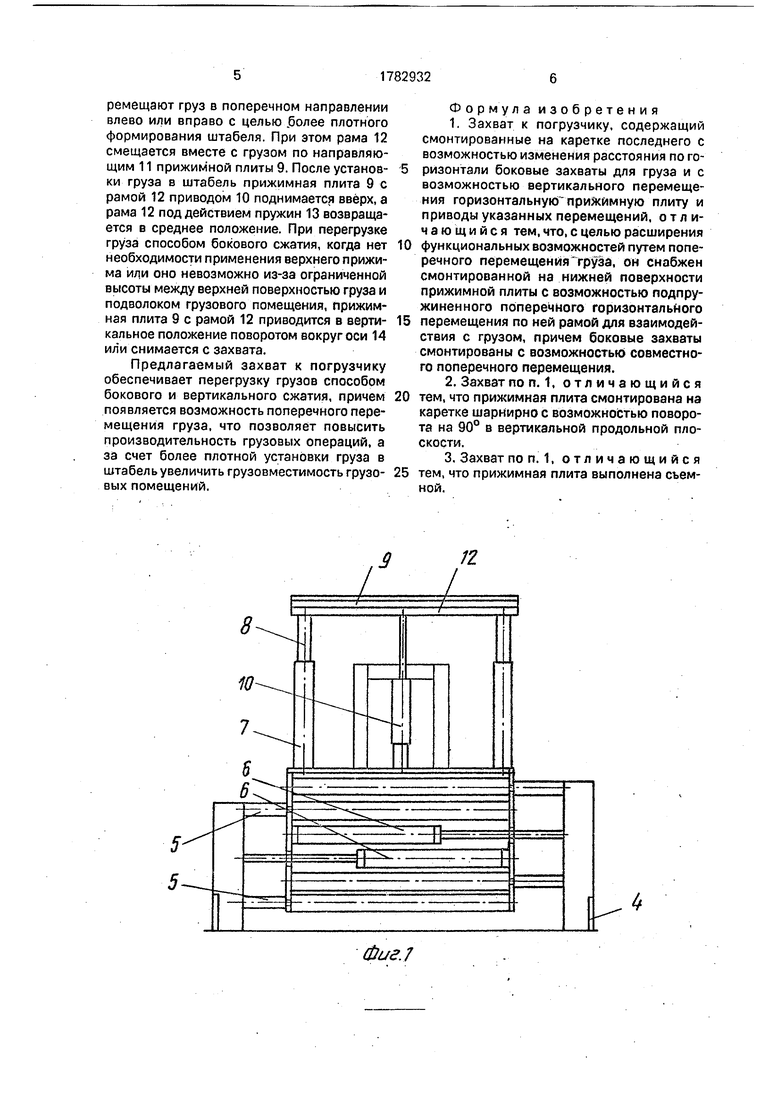
На фиг. 1 изображен предлагаемый за5 хват, вид спереди; на фиг. 2 - то же, вид сбоку; на фиг. 3 - прижимное устройство, разрез.
Захват к погрузчику 1 содержит каретку 2, установленную на грузоподъемнике 3 по0 грузчика, боковые захваты 4, смонтированные в горизонтальных направляющих 5 с возможностью изменения расстояния по горизонтали и совместного поперечного пере- мещения приводом 6. На каретке 2
5 установлена вертикальная телескопическая рама 7, на выдвижной части 8 которой смонтирована горизонтальная прижимная плита 9, перемещаемая приводом 10. На нижней поверхности прижимной плиты 9 смонтиро0 занэ с возможностью перемещения по направляющим 11 рама 12. Прижимная плита 9 и рама 12 соединены пружинами 13. Прижимная плита 9 установлена на каретке шарнирно с возможностью поворота на 90°
5 в вертикальной продольной плоскости вокруг горизонтальной оси 14. Прижимная плита 9, кроме того, выполнена съемной.
Захват к погрузчику работает следующим образом. Для перегрузки груза спосо0 бом вертикального сжатия прижимная плита 9 с рамой 12 приводится в горизонтальное положение и приводом 10 поднимается вверх. Погрузчик 1 подъезжает к грузу и заводит боковые захваты 4 под груз или
5 сжимает груз этими ьахватами. Прижимная плита 9 с рамой 12 приводом 10 опускается вниз и сжимает груз в вертикальном направлении. Далее груз транспортируется погрузчиком 1 известным образом для установки в штабель. Боковые захваты А приводом 6 перемещают груз в поперечном направлении влево или вправо с целью .более плотного формирования штабеля. При этом рама 12 смещается вместе с грузом по направляющим 11 прижимной плиты 9. После установ- ки груза в штабель прижимная плита 9 с рамой 12 приводом 10 поднимается вверх, а рама 12 под действием пружин 13 возвращается в среднее положение. При перегрузке груза способом бокового сжатия, когда нет необходимости применения верхнего прижима или оно невозможно из-за ограниченной высоты между верхней поверхностью груза и подволоком грузового помещения, прижимная плита 9 с рамой 12 приводится в верти- кальное положение поворотом вокруг оси 14 ил и снимается с захвата.
Предлагаемый захват к погрузчику обеспечивает перегрузку грузов способом бокового и вертикального сжатия, причем появляется возможность поперечного перемещения груза, что позволяет повысить производительность грузовых операций, а за счет более плотной установки груза в штабель увеличить грузовместимость грузо- вых помещений.
Формула изобретения 1. Захват к погрузчику, содержащий смонтированные на каретке последнего с возможностью изменения расстояния по горизонтали боковые захваты для груза и с возможностью вертикального перемещения горизонтальнукГ прижимную плиту и приводы указанных перемещений, отличающийся тем, что, с целью расширения функциональных возможностей путем поперечного перемещения груза, он снабжен смонтированной на нижней поверхности прижимной плиты с возможностью подпружиненного поперечного горизонтального перемещения по ней рамой для взаимодействия с грузом, причем боковые захваты смонтированы с возможностью совместного поперечного перемещения.
2.Захват по п. 1, отличающийся тем, что прижимная плита смонтирована на каретке шарнирно с возможностью поворота на 90° в вертикальной продольной плоскости.
3.Захват поп. 1, отличающийся тем, что прижимная плита выполнена съемной.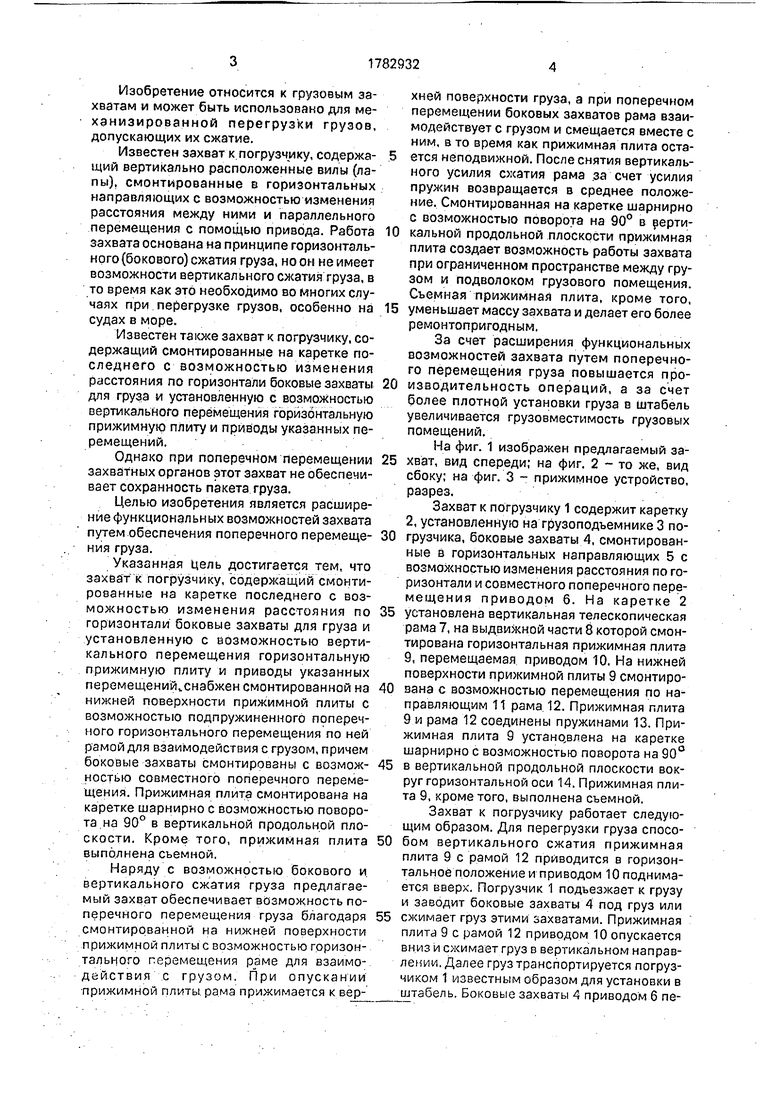
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемник погрузчика | 1985 |
|
SU1296507A1 |
| ГРУЗОВАЯ КАРЕТКА ГРУЗОПОДЪЕМНИКА ПОГРУЗЧИКА | 2024 |
|
RU2828413C1 |
| Навесное устройство к погрузчику для перегрузки грузов в кипах | 1990 |
|
SU1791371A1 |
| БОКОВОЙ ЗАХВАТ К ПОГРУЗЧИКУ | 1993 |
|
RU2081811C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ВИЛОЧНОГО ПОГРУЗЧИКА | 1991 |
|
RU2011636C1 |
| Навесное оборудование к передвижным погрузчикам | 1976 |
|
SU587094A2 |
| Захват для бочек к погрузчику | 1987 |
|
SU1458311A1 |
| ПРИЖИМНОЕ УСТРОЙСТВО К ВИЛОЧНОМУ ПОГРУЗЧИКУ | 1991 |
|
RU2009994C1 |
| Грузозахватное устройство к погрузчику | 1983 |
|
SU1110746A1 |
| Промышленный погрузчик | 1989 |
|
SU1684256A1 |
Использование: механизированная перегрузка грузов, допускающих их сжатие. Сущность изобретения: захват к погрузчику 1 содержит каретку 2, установленную на грузоподъемнике 3 погрузчика, боковые захваты 4, смонтированные в горизонтальных направляющих 5 с возможностью изменения расстояния по горизонтали и совместного поперечного перемещения приводом 6. На каретке 2 установлена вертикальная телескопическая рама 7, на выдвижной части 8 которой смонтирована горизонтальная прижимная плита 9, перемещаемая приводом. На нижней поверхности прижимной плиты 9 смонтирована с возможностью перемещения по направляющим рама 12. Прижимная плита 9 и рама 12 соединены пружинами. Прижимная плита 9 установлена на каретке шарнирно с возможностью поворота на 90° в вертикальной продольной плоскости вокруг горизонтальной оси 14. Прижимная плита 9, кроме того, выполнена съемной. 2 з.п. ф-лы, 3 ил.
Фиг. 7
jpn& 3.
| Агарев Е.М | |||
| и др | |||
| Механизация ПРТС работ на холодильниках | |||
| М.: Легкая и пищевая промышленность, 1984, с | |||
| Способ изготовления звездочек для французской бороны-катка | 1922 |
|
SU46A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
