Известна система гироскопов, в которых отсчет углового положения летательного аппарата производится «е относительно оси отдельного гироскопа, а относительно осреднвинойоси системы гироскопов. В известной системе осуществлена взаимная коррекция осей отдельных гироскопов с помощью сигналов, вырабатываемых счетно-регистрирующими и счетно-решающими устройствами.
Однако известные системы управления с использованием свободных гироскопов, особенно инерциальные системы дальней навигации, обладают существенным недостатком: невозможно бесконечно долго поддерживать заданные направления в инерц.иальном пространстве изза «уходов свободных гироскопов, т. е. отклонения с течением времени осей вращения роторов гироскопов от неизменных направлений инерциального пространства, вследствие наличия возмущающих движение роторов моментов.
Предлагаемое устройство отличается от известных тем, что в нем исключение ощибок уходов свободных гироскопов от целого ряда постоянно действующих факторов, таких, как дебаланс масс элементов гироскопа, заедание цапф подвеса, электромагнитное тяжение, осущеС1вляется за счет поворотов корпусов гироскопов по определенной программе вокруг оси вращения ротора. К программному устройству подключено вычислительное устройство, связанное с моментными датчиками платформы. Это отличие обеспечивает автоматическое определение и компенсацию ощибок уходов свободных гироскопов и повыщает точноегь управления летательных аппаратов.
151835.- 2 -
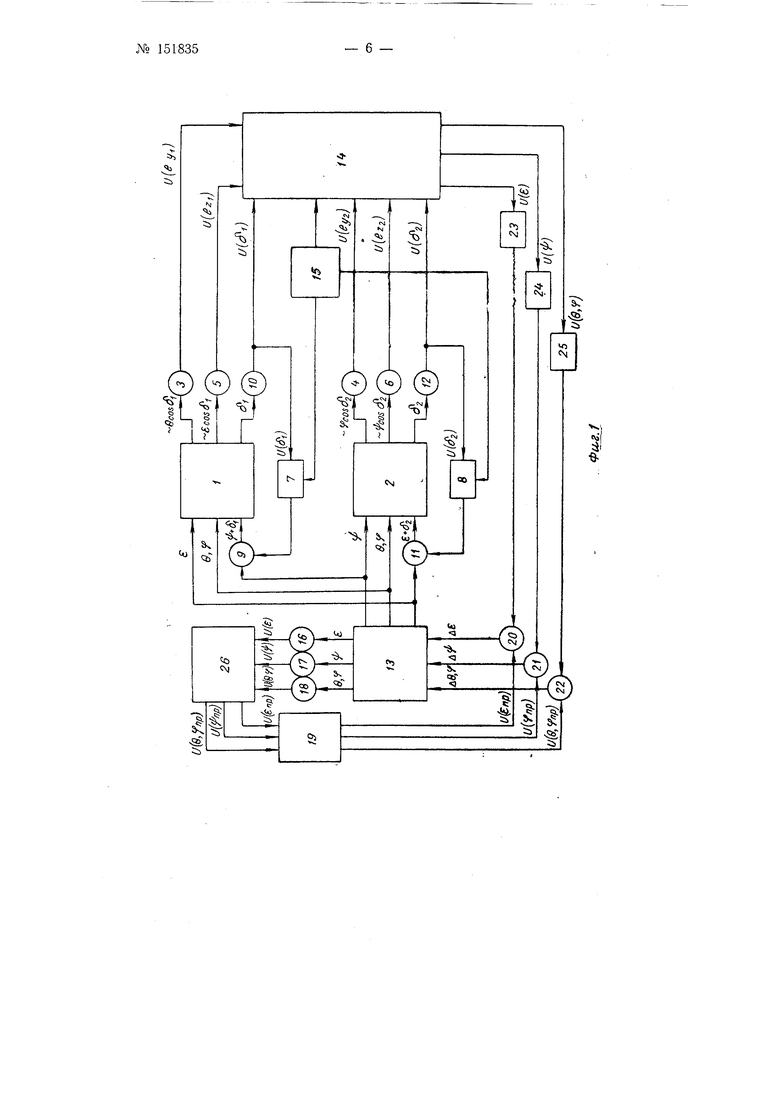
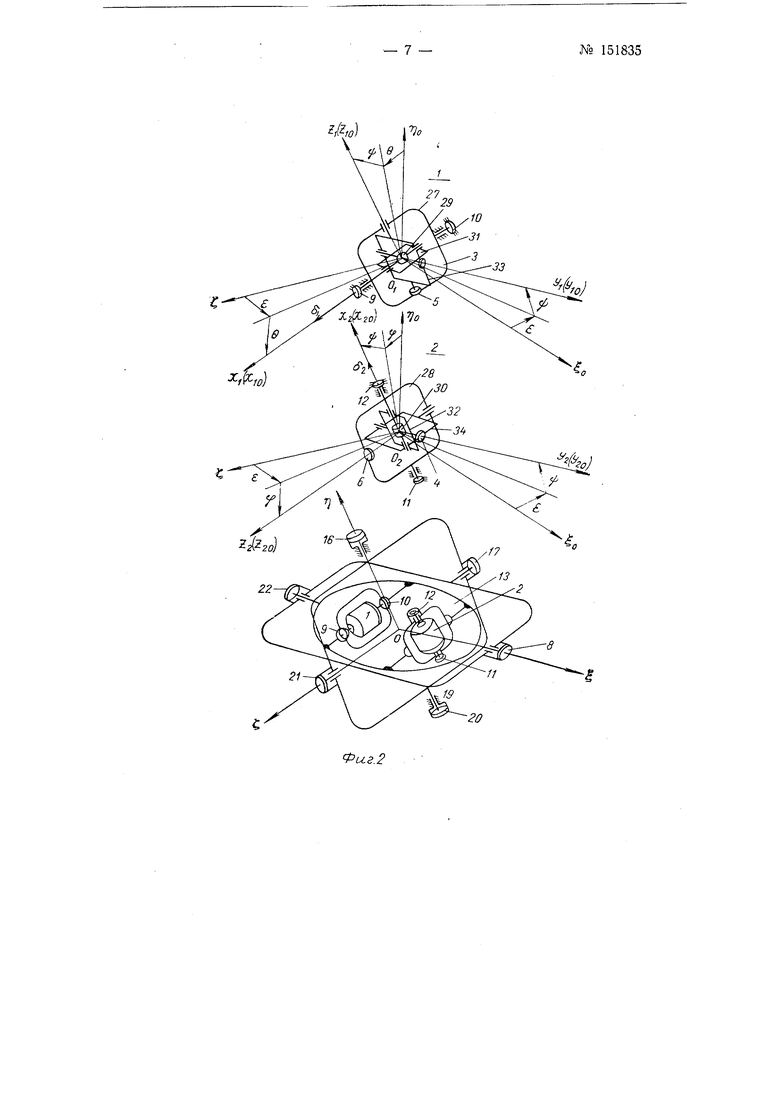
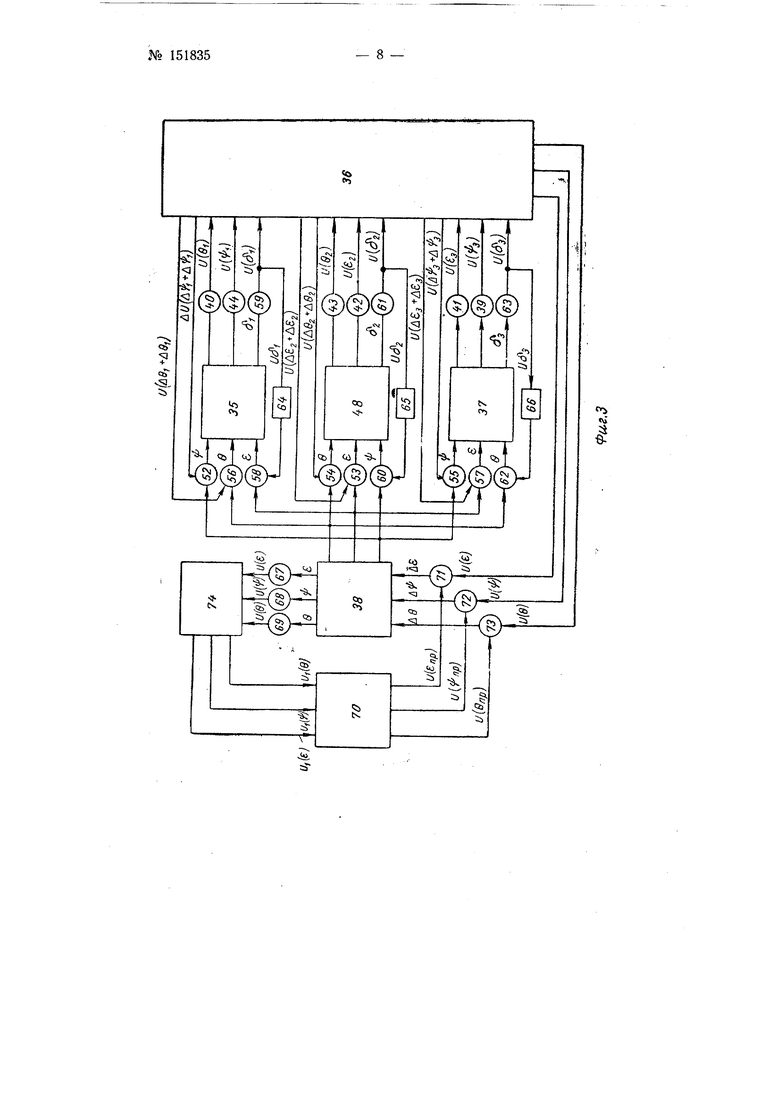
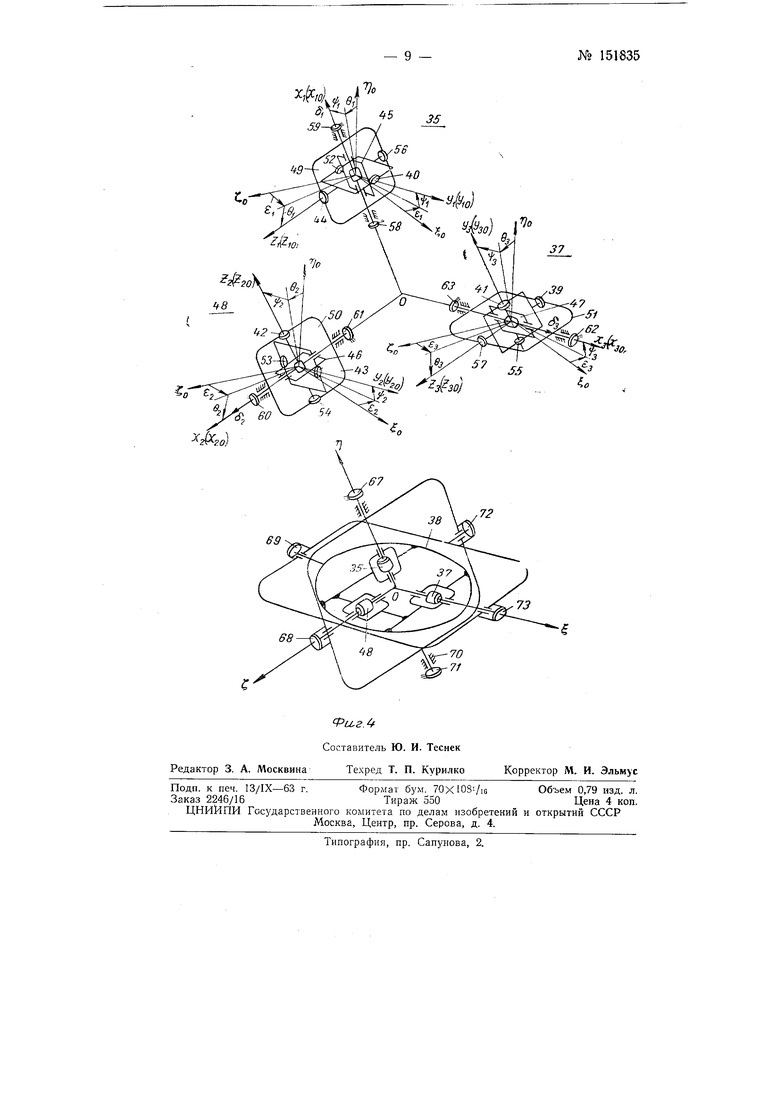
На фиг, 1.,изр4ражена функциональная схема предлагаемого устройства на двух гироскопах с преобразователем координат; на фиг. 2 - упрощенная принципиальная схема системы двух свободных гироскопов; на фиг. 3 - функциональная схема предлагаемого устройства на трех гироскопах с вычислительным устройством; на фиг. 4- упрощенная принципиальная схема системы трех свободных гироскопов.Предлагаемое бортовое устройство коррекции уходов гироскопов относительно неизменных в инерциальном пространстве направлений содержит два свободных гироскопа 1 и 2, с датчикам,и 3, 4, 5 и 6 измерительных осей OiY-i, OzZiQ, , , усилительно-преобразующие устройства 7 и 5 со следящими системами 9, 10, 11 и 12, обеспечивающими программные развороты. Система подвески платформы 13 объединена с системой ее стабилизации и управ-ленкя, включающей преобразователь 14 координат, программное устройство 15, датчики 16, 17, 18 сигналов положения объекта 19 относительно платформы 13, следящие приводы 20, 21 и 22, усилительно-преобразующие устройства 23, 24, 25 и системы 26 управления объектом 19. Система свободных гироскопов 1 и 2, корпусы 27 и 23 которых относительно платформы 13 имеют .одну степень свободы вокруг осей , связана с платформой посредством следящих систем 9, 10, , 12, позволяющих обеспечивать по командам из программного устройства 15 программные развороты гироскопов относительно исходных положений на углы 6; ±180°. Инерциальная система координат обозначена буквами О, 2, So, Tjo. система координат, связанная с платформой 13, -
В арретированном состоянии направления осей , вращения роторов 29 и 30 гироскопов 1 и 2 совпадают с направлениями осей , 02X20 вращения их корпусов. |При этом направление осей, OiYi, , и связанных с внутренними и внешними рамками 31 и 32, 33 и 34 совпадает с соответствующими осями OiYio, , и корпусов гироскопов и с датчиков 3, 4, 5, 6 снимаются нулевые сигналы.
В разарретированном состоянии, в момент времени о. включается система стабилизации платформы 13 от датчиков 3, 5, 6. Через определенные интервалы времени i-4 по команде из программного устройства 15 корпус 28 гироскопа 2 разворачивается следящей системой 11, 12 вокруг оси на угол 62 180° и фиксируется в этом положении. Одновременно с началом разворота гироскопа 2 включается в работу преобразователь 14 координат, обеспечивающий необходимое соотнощение сигналов с датчиков 4 н 6 гироскопа. Преобразователь 14 координат, в режимах программных разворотов гироскопов, обеспечивает формирование сигналов в системе стабилизации платформы, согласно следующим зависимостям:
;7(е) ;7(ez,)cos2j - L(evjsin3j; U(@) U(ey)coso + U(e,)sinb,; U(s) U(ey.)cosr. -I- U(e,.) sin5,; /(0) L(ezo)cos3, - U(ey,) где; L(e), L/(Q), О (ф), U () - функции углов, арретированном состоянии положения систем U(e)(-f) определяющих в разкоординат OiXiY Zi,
, относительно систем координат ОДюУю ю, и
6(, LJ(eyJ, iJ(ezJ и(ег,) - функции сигналов датчиков 5. 4,5и6.
По окончании разворота в момент фиксации гироскопа 2 преобразователь 14 координат выключается из работы.
В момент времени 4 i+A по кома.нде из программного устройства 15 корлус гироскопа / разворачивается следящей системой 9, 10 вокруг оси OjXio на угол и фиксируется в этом положении. Одновременно с началом разворота гироскопа / включается преобразователь 14 координат сигналов с датчиков 3, 5.
По окончании разворота в момент фиксации гироскопа 1 преобразователь 14 координат отключается от системы стабилизации платформы 13.
В дальнейшем периодически, через равные интервалы времени циклы последовательных .разворотов гироскопов / и 2 на углы 6;(-1) (где/ 1, 2, 3... п - циклы программных поворотов) повторяются.
Устройство может быть построено и без преобразователя 14 координат, однако при этом необходимо введение третьего гироскопа 35 и вычислительного устройства 36 для определения и компенсации постоядных составляющих ошибок «ухода свободных гироскопов. Вычислительное устройство 36 вырабатывает сигналы, величина которых пропорциональна моментам, вызывающим эти «уходы.
При наличии трех свободных гироскопов устройство функционирует следующим образом.
В момент времени 4 разарретируются гироскопы 35, 37, 48, включается система стабилизации платформы 38 от датчиков 39, 40, 41. Одновременно с разарретированием гироскопов 55 и 57 в вычислительном устройстве 36 фиксируются показания г1;зо, вю, eso, 20, ©20, vjio датчиков 39, 40, 41, 42, 43, 44 (где: 9 ,е,г|; имеют те же значения, что и в случае устройства с двумя свободными гироскопами 1 н 2, с той лишь разницей, что в данном слулае рассматриваются три системы координат O XiYiZi, , , связанные с внутренними рамками 45, 46, 47 гироскопов 35, 37 к 48 w три системы координат 0 Хi YlaZi(i, OzoXzuYzoZ o, 0зоАзоУзо2зо, связанные с корпусами 49, 50, 51 тех же гироскопов). Через определенные интервалы времени производятся новые измерения и фиксация в вычислительном устройстве 36 углов поворота egi, езь ви, ваь и, Uai- По полученным результатам в вычислительном устройстве 36 вычисляются и фиксируются параметры:
Д ,. Д 011 - Д в,1 (е„ - ) - (9,1 - в.,о); Д Sgi,,, Д 831 - Д ,1 (гз1 - ез„) - (s.,i - );
Д Ф§1 i,, Д - Д 11 (hi -1-30) - (hi - t-io)Одновременно с фиксированием результатов измерений в времени ii включается следующая система программного разворота гироскопа 48 вокруг оси на угол 62 180°. По окончании разворота и фиксации гироскопа 48 в момент начала новых измерений t в вычислительном устройстве 36 снова фиксируются величины углов eV., ьз1, вц, в21, -фц, -фз. Через интервал времени А4 4-tl произво№ 151835
№ 151835
дитСя новое измерение и фиксация величин углов 22, ез2, ©12, ваз, , 32 и вычисление параметров:
Д Oi, 0,, Дв12-Д 022 (©12 - Qll) - (022 - ©21); Д 32 е.,, 32 ®22 (32 3l) (®22 2l)
Д 132 Ф. Д Фз2 - Д fe2 - -i-ai) - (ha - f и)На основании вычисленных параметров Двцв.,,, Ssis,,,, aiiMr Д , Ь2Ф12 в вычислительном устройстве 36 вычисляются средние величины скоростей уходов свободных гироскопов 35, 37, 48 на интервале времени , . согласно следующим зависимостям:
Ли- QII 61;. - 9l2 виА ; А S31 31 - 32 23 .
«Фп- 2(Д, + А.) -срп- 2(t, + t,)
о- QH а., + Ql2 0;.л - А 031 21 + А 32 32
Jcp,i- 2(-t, + M,) -срп- 2(Lt, + M,)
Полученные значения средних величин скоростей уходов гироскопов 35, 37, 48 используются затем для коррекции производящихся в вычислительном устройстве 36 основной системы вычислений и активной компенсации ошибок «ухода, с целью повышения точности дальнейшей работы гироскопов 35, 37, 48.
Одновременно с фиксированием результатов измерений в момент времени 2 производится переключение в системе стабилизации платформы 38 с датчика 40 на датчик 43 и затем производится программный разворот гироскопа 35 вокруг оси ОДю на угол и фиксация его в этом положении.
В момент окончания разворота f измеряются и фиксируются параметры е22, 8з2, 0l2, ©22, -2, фз2.
Через интервал времени снова измеряются и фиксируются параметры е2з, зз, Qia, 02з, is, зз, согласно которым вычисляются величины:
Д 81.36,3 Д 013 - Д023 (013 - 0l2) - (023 - 022); 33 23 ®3S 23 -- (®33 ® Зз) (®23 22/
Д Ьз тхз Д-тзз - ДVi3 ( тз2) - (т13 ii2)
И величины средних скоростей уходов гироскопов за время АГа, 3 .
л Л Авдо е,, - Авдз 9,, .Д , А Фз2 J.i, - 33 Фп .
;- C/iTiifi .iA - frjetn .,
(А, + (Дг2 + Д4)
Ли - QIS @..i + .Д л .. + Фззф1.,
ь Wxij-inf) - . тл -
(Af2-fA/3) . 2(Д -{-Д4)
По полученным данным в вычислительном устройстве 36 вычисляются также средние величины уходов гироскопов 35, 37, 48 за время цикла измерений и формируются корректирующие импульсы моментов, с учетом естественной коррекции уходов гироскопов 35, 37, 48 при разворотах, согласно равенсгвам:
Д0с;,1-Д0ф1( + + ДУ + У;
Дв,,, Д0,,, (Д 1 - Д , - Д t,) + У; Д 3,,3 А ср (Д 1 + Д , + Д з) + У у ; Д е,р, Д ;,,, (Д t, ,- Д/з) + tp -.,р, Д-j. (А 1 + А ., + А t,) + М±::1 У;
до,,, А:,,J (А +Д - Д з) + у.
В момент времени tg производится переключение датчиков с 39 на 44 и с 41 на 42 в системе стабилизации платформы 38 и производится программный разворот гироскопа 37 вокруг оси на угол б8 180°.
По окончании разворота гироскопа 37 вычислительным устройством 36 производится коррекция положения измерительных осей гироскопов 35, 37, 48 соответствен.но вычисленным в вычислительном устройстве 5(з углам , .,, ср-21 сря АОдр, . путем подачи сформированных импульсов на моментные датчики 52, 53, 54, 55, 56, 57 и компенсацию вычисленных величин средних уходов гироскопов путем приложения постоянных компенсационных моментов, пропорциональных A6cpi, A0Cj02, Scj5-2j -cpai -ir.pi, Атсрз на тех же моментных датчиках.
По окончании коррекции „в момент времени f измеряются и фиксируются параметры , езз, ©н, взз, фЧз, ззЧерез интервал Д/4 снова измеряются и фиксируются параметры 824, ез4, ©14, ©24, i|ii, 1|;з4, согласно которым вычисляются величины , - срз-25 icpiti Чсрзл-: -cpzi дальнейшем циклы повторяются в соответствии с описаи«ой выше логической схемой разворотов гироскопов на углы 8; (-1) посредством следящих систем 58, 59, 60, 61, 62, 63. Так же, как и в случае устройства на двух свободных гироскопах / и 2, данное устройство содержит усилительно-преобразующие устройства 64, 65, 66, датчики 67, 68, 69 сигналов положения объекта 70, следяшие приводы 71, 72, 73 и систему управления 74Объектом 70.
Предмет изобретения
1.Бортовое устройство коррекции уходов свободных гироскопов относительно неизменных в инерциальном пространстве направлений, содержащее несколько свободных гироскопов с датчиками измерительных осей, усилительное устройство, систему подвески платформы, объединенную с системой стабилизации и управления, отличающееся тем, что, с целью повышения точности поддержания курса летательных аппаратов, в систему управления устройством включено программное устройство, осуществляющее поворот корпусов гироскопов вокруг оси вращения ротора на углы б,-(-1), где г 1, 2, 3,.. . п - циклы программных поворотов.
2.Устройство по п. 1, отличающееся тем, что, с целью автоматической компенсации постоянных составляющих опшбок ухода свободных гироскопов, к програм.мному устройству подключено вычислительное устройство, связанное с моментными датчиками платформы.
- 5 -.№ 151835
Фиг.2
20
«
Vi

| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЯЕМАЯ ПАРАШЮТНАЯ СИСТЕМА | 1996 |
|
RU2111898C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ПО КРЕНУ ИНЕРЦИАЛЬНОЙ ПЛАТФОРМЫ ДЛЯ БЫСТРОВРАЩАЮЩИХСЯ ОБЪЕКТОВ И СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ ИНЕРЦИАЛЬНАЯ ПЛАТФОРМА | 2003 |
|
RU2256882C2 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
| Система стабилизации изображения на подвижном основании | 2019 |
|
RU2753162C2 |
| ИНЕРЦИАЛЬНАЯ СИСТЕМА | 2006 |
|
RU2326349C2 |
| САМООРИЕНТИРУЮЩАЯСЯ СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2192622C1 |
| АВТОНОМНЫЙ КОМПЛЕКС ДЛЯ КОРРЕКЦИИ ИНЕРЦИАЛЬНЫХ СИСТЕМ ПЛАТФОРМЕННОЙ ОРИЕНТАЦИИ И НАВИГАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2826826C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2313067C2 |
| Малогабаритный навигационный комплекс | 2016 |
|
RU2644632C1 |
| СПОСОБ КОРРЕКЦИИ ПРОГРАММНОГО ДВИЖЕНИЯ ПОЛЯРНОГО ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА КОРАБЕЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2008 |
|
RU2386106C1 |