Изобретение относится к устройствам для ориентации и поштучной выдачи грузов и может быть использовано в магаиностроении, металлургии и других отраслях народного хозяйства.
Цель изобретения - расширение тех- -нологических возможностей путем обеспечения выдачи объемных грузов различной формы.
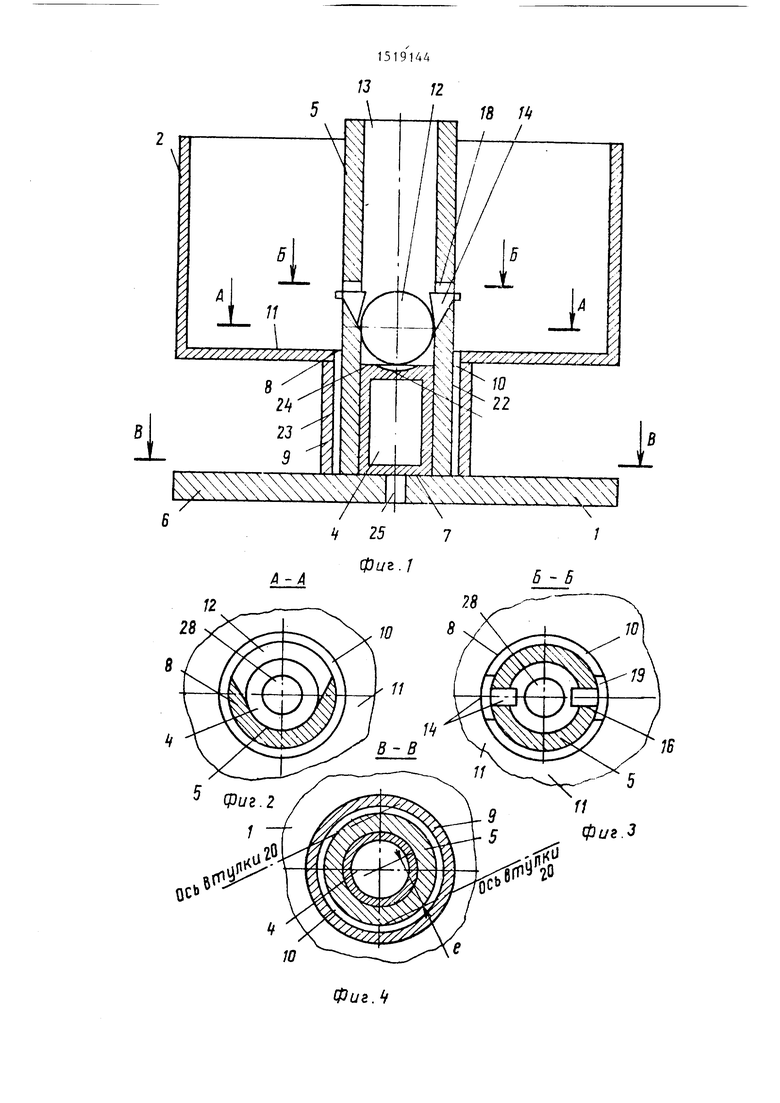
На фиг.1 изображен предлагаемый питатель, общий вид; на фиг.2 - разрез А-А на фиг.1; на фиг.3 - разрез
Б-Б на фиг.1; на фиг.4 - разрез по В-В на фиг.1; на фиг.5 - резьбовая втулка, продольный разрез; на фиг.6 - отсекатель, продольный разрез; на фиг,7 - первый вариант исполнения питателя для плоских деталей; на фиг.8315
разрез Г-Г на фиг.7; на фиг.9 - второй вариант исполнения питателя для плоских деталей; на фиг.1 О - разрез Д-Д на фиг.9; на фиг.1I - вариант исполнения чаши с фланцем; на фиг.12 - вариант исполнения питателя с ограничением поворота чаши при помощи пальцев; на фиг . I 3 - вариант oгpaн rчeния поворота чаши при помощи шариков; на фиг.14 - вариант исполнения отсекате- ля; на фиг.15 и 16 - варианты исполнения толкателя; на фиг.17 - вариант вьпюлнения ограничителя перемещения тогп ателя,
Питатель содержит корпус 1, чашу 2 для размещения груза (деталей), генератор 3 колебаний чаши 2 и толкатель А .
Корпус I выполнен в виде стакана 5 с фланцем 6 и дном 7. На корпусе 1 расположена соосная с ним чаша 2, которая охватьвает стакан 5, имеет отверстие 8 и опирается на фланец 6 опорой 9. Стакан 5 в отверстии 8 и опоре 9 установлен с зазором 10. В стакане 5 на уровне дна 11 чаши 2 выпоянен канал 12, предназначенный для свободного прохода грузов типа шар из чаши 2 в центральное отверстие 13 стакана 5. Несколько выше канала 12 размещено два-три отсекателя 14, которые предназначены для удержания ряда грузов, находящихся в отверстии ГЗ выше отсекателей 14.
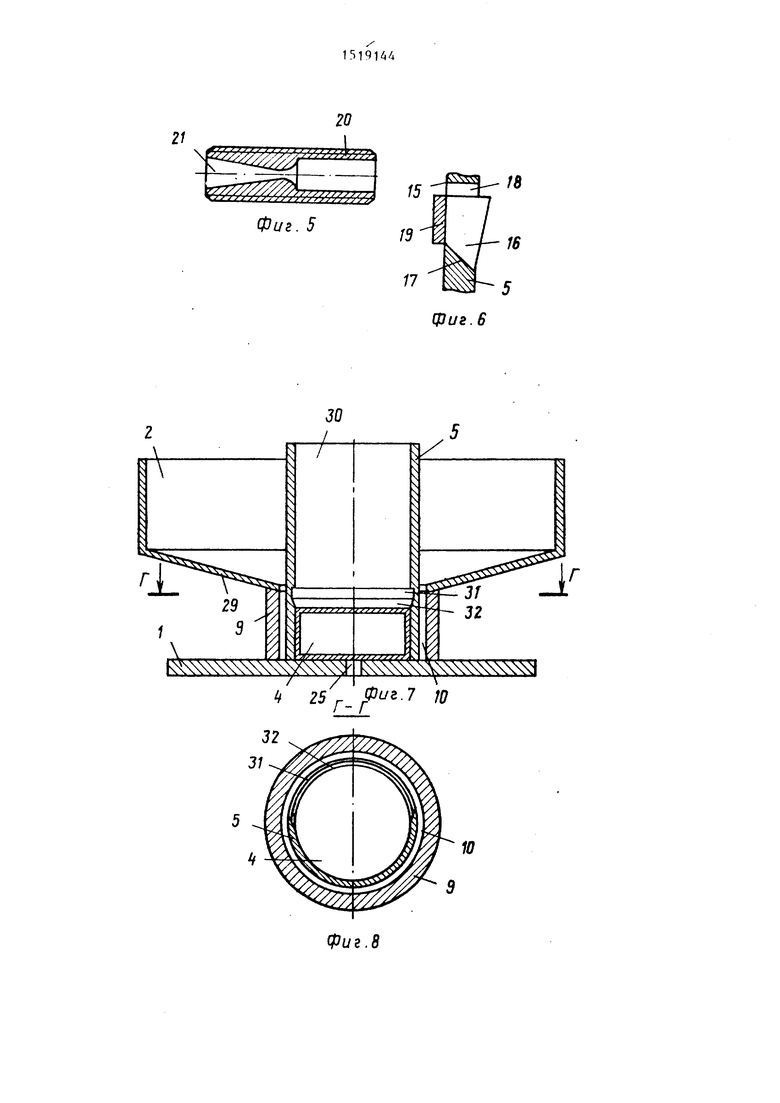
Отсекатели 14 расположены в пазах 15 стакана 5 и обеспечивают свободный проход грузов вверх, препятствуя перемещению их вниз под действием сил гравитации. Отсекатель 14 хвостовиков 56 взаимодействует с наклонной поверхностью 17 паза I5 и имеет свободный ход 18 по вертикали, что обусловливает радиальное перемещение отсекатепя 14 при взаимодействии с грузом. Планка 19, жестко соединенная с хвостовиком 16, исключает возможность выпадения отсекателя 14 из паза 15. Генератор 3 колебаний выполнен в виде ряда резьбовых втулок 20 с профилированными каналами, представляющими собой сопла 21.Сопла 21 могут быть сужающимися или типа Лаваля, что обеспечивает ускорение потока рабочей среды до звуковой или сверхзвуковой скоростей. Сопла 21 соединены с источником рабочей среды и сообщены с атмосферой на поверхности 22 стакана 5. Истекающий из сопл 2 поток рабочей среды
4-
взаимодействует с поверхностью 23 опоры 9, приводя ее в колебание и вращение вследствие образования на поверхности 23 усилия за счет силового давления и трения.
Смещение оси резьбовой втулки 20 относительно центра устройства на расстояние а меньшее чем диаметр
стакана 5, обеспечивает образование касательной составляющей силы, обусловливающей создание крутящего момента на опоре 9. Толкатель 4 размещен в центральном отверстии 13,опирается
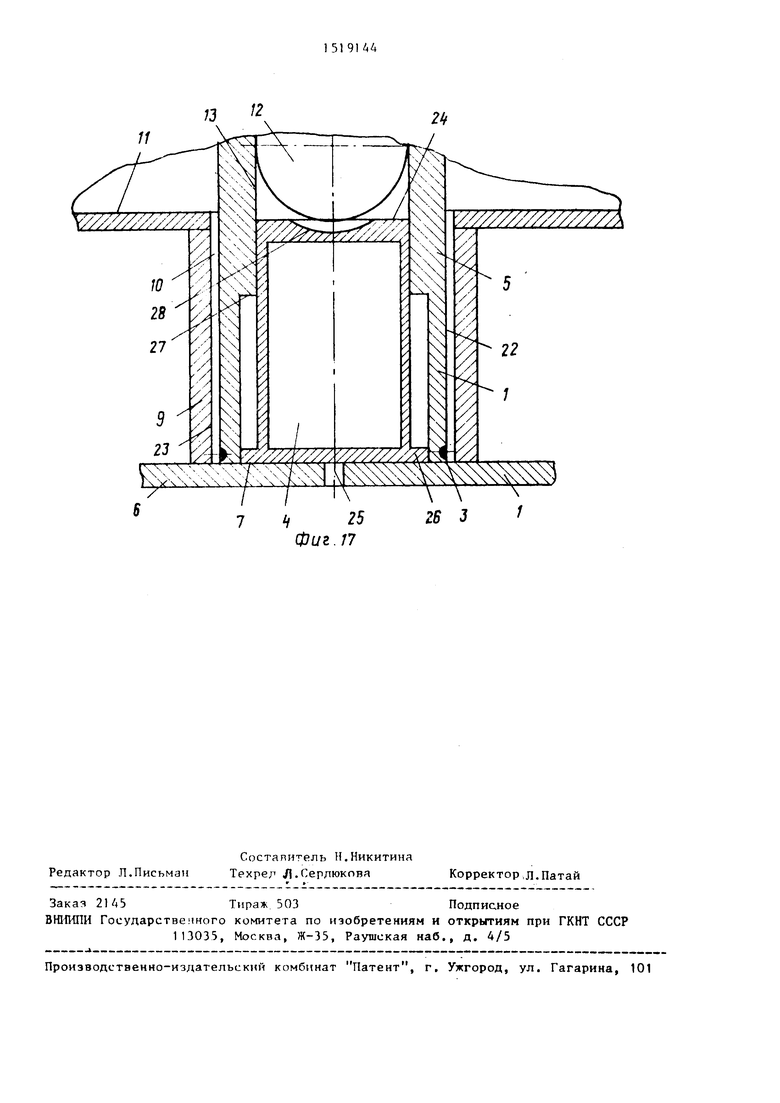
чя дно 7 и выполнен в виде пустотелого цилиндра, торцовая поверхность 24 которого расположена несколько ниже канала 12. В дне 7 вьшолнен канал 25, соединенный с источником рабочей среды. Величина вертикального перемещения толкателя 4 ограничена, например, при помощи фланца 26 на толкателе 4, t взаимодействующего с буртиком 27 отверстия 13. Управление работой толкателя 4 осуществляется от распределителя .
Для повышения надежности работы питателя в толкателе 4 выполнено гнездо 28, предназначенное для размещения и позиционирования перемещаемого груза. Развиваемое толкателем 4 усилие должно обеспечивать перемещение по центральному отверстию 13 ряда грузов.
Возможен вариант исполнения питателя, предназначенного для верхней вьдачи плоских грузов (см.фиг.7). В этом случае дно 29 чаши 2 выполнено с уклоном к центру, что обеспечивает
движение грузов к центру под действием сил гравитации и вибрации. Профиль центрального канала 30 стакана 5 соответствует форме выдаваемого из питателя груза, что позволяет сориенти- ровать его по угловой координате. Канал 31 для удаления груза из чаши 2 снабжен фаской 32, которая обеспечивает быстрое опускание груза на исходную позициго на толкатель 4, и выполнен в стакане 5 такой высоты, которая исключает одновременный проход двух грузов. Дпя контроля уровня стопы груза в канале 30 предназначен бесконтактный датчик 33, который подает сигнал переключения на распределитель, управляющий подачей рабочей среды в канал 25. При низком уровне стопы грузов в канале 30 датчик 33 формирует сигнал на работу распределителя
515
в циклопом режиме до тех пор, пока стона грузов не достигает требуемоГГГ уровня и датчик 33 не прекращает формирование сигнала. В ре ультате этого толкатель 4 сопергпает возвратно-пос- ту11ател1И)ыо перемещения причем вис - той толкателя Д в исходном положении достаточен для перемещения через канал 31 на noivnuno над толкателем 4 .
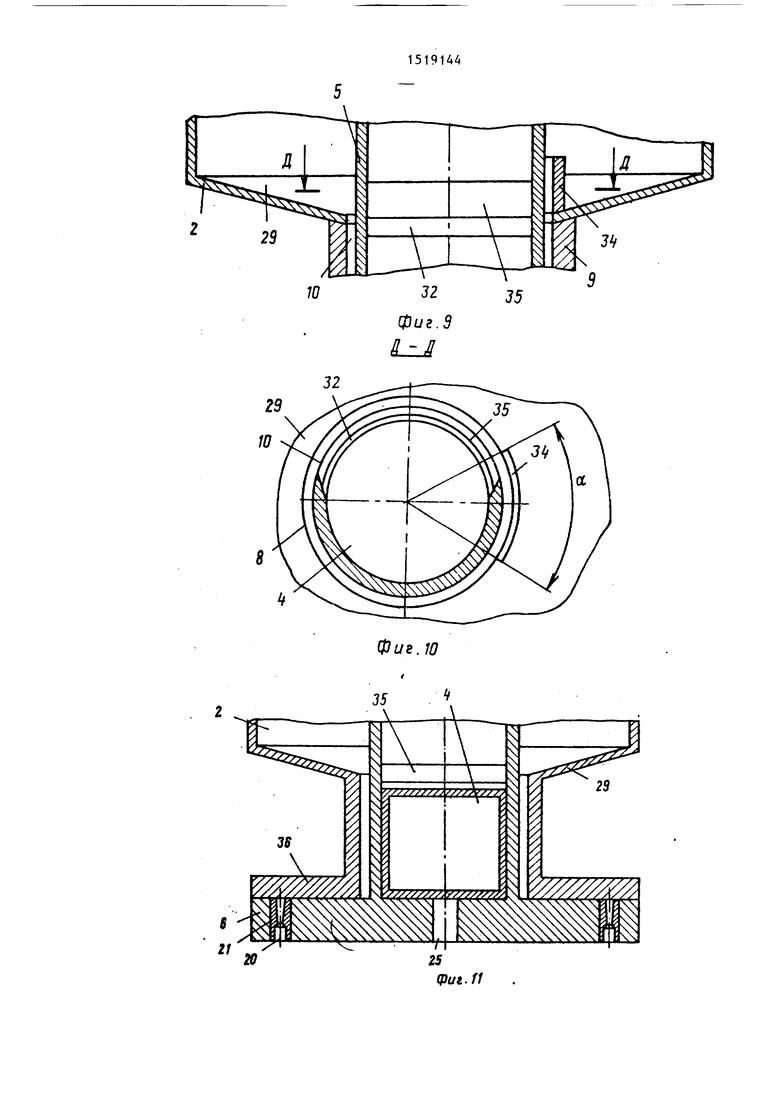
Возможен вариант исполнения ycTpoi i ства для плоских г рузов (см .фиг . 9) , когда дно 29 чаши 2 снабжено огрян№1и телем 34, жестко закрепленным и препятствующим доступу грузов в канал 35 стакана 5 в пределах угла Ы. , меньшего 180. Угол 0)- определяется скоростью вращения чаши 2 и временем, необ ходимьм для перекрытия канала 35 толкателем 4. Высота канала 35 обеспечивает одновременное перемещение нескольких грузов на исходную позицию над толкателем 4. Высота ограничителя 34 такова, что перекрьшает канал 35 по высоте и исключает доступ грузов в этот канал. Величина зазора 10 определяет скорость (частоту) вращения чаши 2.
Возможен вариант исполнения чаши 2 (см.фиг.11), когда она снабжена фланцем 36, а сопла 21 сообщены с атмосЛе рой на поверхности )ланца 6, обращенный к фланцу 36. При этом продольные оси резьбовых втулок 20 размещены в вертикальной плоскости, но направлены под углом к горизонтальной плоскости. Такое исполнение обусловливает создание потоком рабочей среды касательной составляющей силы взаимодействия, создающей на фланце 36 крутящий момент. Достаточная площадь взаимодействия фланцев 6 и 36 обусловливает колебание фланца 36 и чаши 2 в вертикальной плоскости.
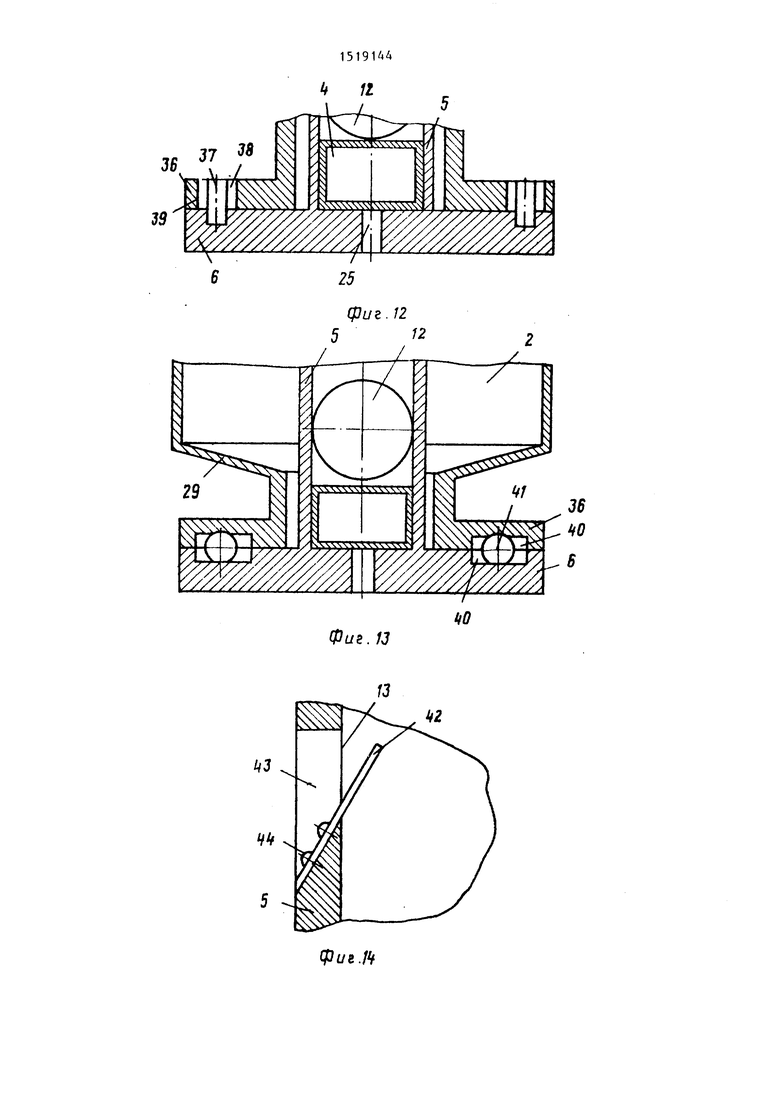
Возможен вариант исполнения питателя (см.фиг.12), когда исключен поворот чаши устройства вокруг верти- . калькой оси. В этом случае во фланце 6 корпуса жестко закреплен палец 37, который размещен с зазором 36 в пазу 39, образованном в теле фланца 36. Вертикальные и горизонтальные колеба- ния чаши 2 достаточны для перемещения грузов типа шар по дну 29 к центру и проход через канал 12, вьтолненный в стакане 5. Продольная ось резьбовой втулки 20 в этом случае вертикальна.
1446
Возможен вариант пгрлпиче {ия попорота чаши при помощи щлриков (см. фиг.13). В этом случае во фланцах 6 и 36 выполнены радилпьные пазы 40, которые расположены ощю мпио. Профиль пазоп 40 может быть треугольным, прямоут ольиым, круговым, но Польщего диаметра, чем 1чл1)ики 41 , рпгголожен0 ные в пазах 40. Длина 40 ограничена, что исключает Bi nia;ieHiie пктрикоп 41 из пазов 40. Такое исполнение сбег- пештает колгПлние члиш 2 и вертика.пь- HOI1 плоскости, а такжо р, горизонтальij ноГ илпскопи по одному направлению, но иск ючае1 noHojui чпши 2 и резко CHi-гжяет солюбачие чаши 2 но другому }{апрл B.nfiHiiH в т-оризшп ,чп1 иой 11пс )гког- ти, пернс-пдикуляриому первому.
0Возможно ИСНОЛНРНП1. О секателя
(cN .фиг . 1 4) , когда он иьш .лнен в виде лентс;чной пружины 42, .кестко закрепленной одним Ki HiioM в пазу 43 при помощи крепления 44. Ппч чЗ обеспечи5 вает изгибание пружины 42 под действием детали i: перемещение пружины за пределы сечения отверстия 13 или ка- Hajb4 30, После прихода груза пружина ,2 возвращае гг., в исходное положение
0 и удерживает стопу rpvuoe от перемещения вниз .
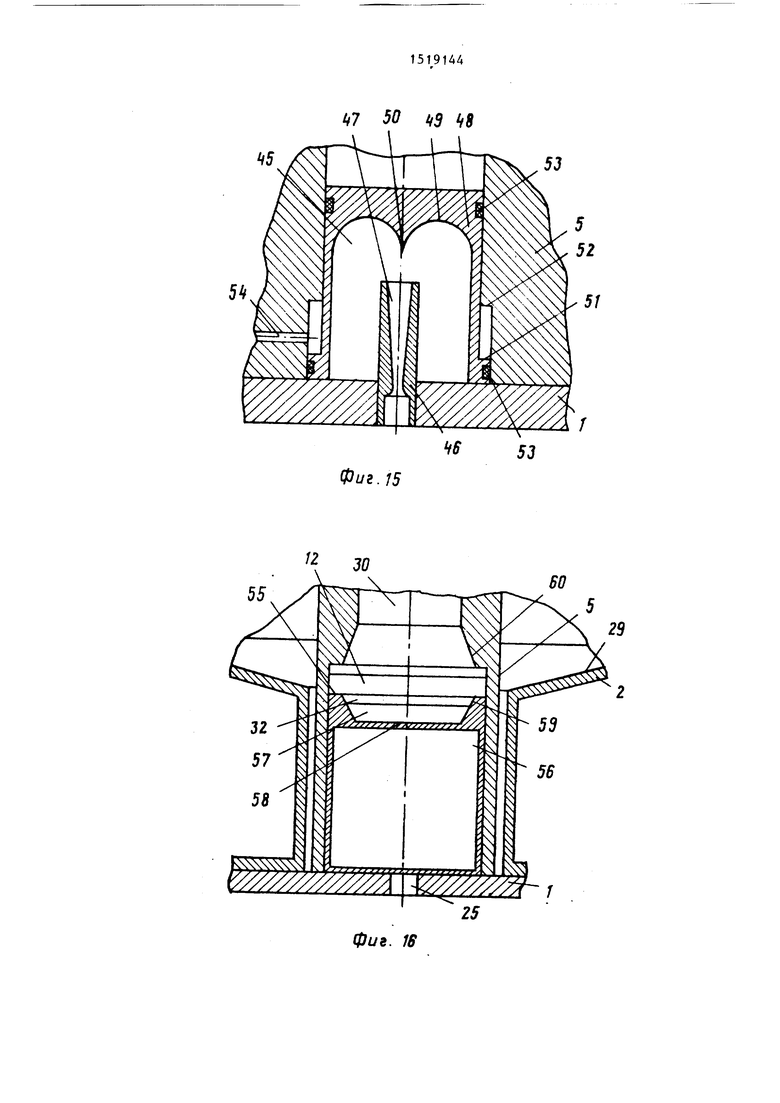
Возможно исполнение толкателя, когда он вьтолнен с пнeвмocolтrIOв.lм приводом. Привод 45 представляе собой втулку 46 с профилированны-1 :аналом, являющимся соплом 47. 47 находится внутри порщнл 48, размещенного на дне 7 стакана 5, закрепленного в корпусе 1 и расположено соосно с тод роидальной поверхностью 49 и вершиной 50, выполненными на внутренней поверхности порщня 48. В нижней части riopni- ня 48 имеется бурт 51 , который огра ничивает вертикальный ход портня 48
5 при взаимодействии с уступом 2 на
внутренней поверхности втулки 5. Пор- щень 48 снабжен уплотнением 53, а в корпусе 1 выполнены каналы 54, сообщающие полость поршня 48 с атмосферой
0 при нахождении его в верхнем положении.
Возможно исполнение толкателя (см. фиг.16), когда на торцовой поверхности 55 толкателя 56 выполнено гнездо
С 57 для размещения ориентируемого груза. При этом дно 58 гнезда 57 расположено несколько ниже уровня дна 29 чаши 2, а две боковые стенки 59 гнезда 57 выполнены с крутым уклоном.
5
обеспечивающим быстрое опускание де- тали в гнездо 57 при подаче ее в про- стра 1ство над толкателем 56. В этом в центральном канале стакана 5 вьшолнена переходная зона 60 от цилиндрической поверхности в зоне перемещения толкателя 56 к тговерхности канала -0, профиль которого соответствует форме ориентируемого груза.
Работает питатель следующим образом .
В чашу 2 засьтают з-рузы типа шар. При подаче рабочей среды она ускоряется в соплах 2 н поток ее взатшодей- ствует с поверхностью 23 опоры 9, приводя ее во вращение и колебание, которые передаются на чаигу 2. Вибрация передается грузам, которые под действием сил гравитации перемещаются через канал 12 в центральное отверстие 13 стакана 5.
При необход№ ости подачи очередного груза по отБерстт ю 1 3 вверх распределитель переключается и подает рабочую среду в канал 25. Под действием рабочей среды толкатель 4 перемещается вверх, поднимая по отверстию 13 груз, который оказьюает при этом силовое давление на отсекатели. 1Д. Под действием груза отсекатели 1 перемещаются по вертшсали и в радиальном направлении, обеспечивая свободный проход груза. После прохода груза от- секатзли 14 под действием сил гравитации опускаются по пазам 15 вниз, препятствуя перемещению гру. за в исходное положение. После этого подача рабочей среды в канал 25 прекращается и толкатель 4 под действием сил гравитации опуска1птся на дно 7, освобождая пространство над тол(;ател( м 4 для размещения следуюп(его груза, поступаю щего из чаши 2 по каналу 12. Далее цикл работы повторяется.
При работе питателя по од}юму из вариантов при вращении чаши 2 ограничитель 34 периодически от секает грузы, не прошедшие кана.ч 35 и не занявшие исходную позицию над толкателем 4. При этом сигнал с датчика 33 включает распределитель только на разовую подачу рабочей среды в канал 25 и в pOM случае,когда канал 35 перекрыт ог- ра ничителем 34, что исключает заклинивание грузов при вертикальном пере- ме дении толкателя 4.
При работе питателя по одному из вариантов при подаче рабочей среды в сопла 21 поток ее заполняет зазор меж- ду поверхностями фланцев 6 и 36 рабо чей средой, поднимая давление в зазоре до тех пор, пока сила давления рабочей среды не преодолевает силу гравитации массы деталей и чаши 2 и не
Q создает зазор между фланцами 6 и 36. Образовавшийся зазор обеспечивает работу сопл 21 в расчетном режиме, что приводит к образованию разрежения в зазоре между фланцами 6 и 36 и опус канию чаши 2 в исходное положение. Далее цикл повторяется и наступает автоколебательный режим работы.
При работе питателя по одному из вариантов при подаче рабочей среды в
„ сопло 47 она ускоряется в нем и с , большей силой воздействует на тороидальную поверхность 49, перемещая . пориень 48 вверх до упора бурта 51 в уступ 52. После прекращения подачи
5 рабочей среды в сопло 47 .давление - внутри поршня стравливается через каналы 54, и поршень 48 возвращается в исходное положение. Пневмосопловой привод 45 позволяет использовать как
0 кинетическую, так и потенциальную . энергию рабочей среды, что обеспечивает его быстродействие.
Формула изобретения
Питатель для штучных грузов, содержащий чашу, корпус с каналом для отвода грузов и пневмовихревой генератор колебаний, сопла которого со
стороны одних из концов сообщены с источником рабочей среды, отличающийся тем, что, с целью расширения технологических возможностей путем обеспечения вьщачи объемных грузов различной формы, корпус представляет собой размещенный внутри части с зазором относительно ее стенок стакан с фланцем, канал для отвода груза выполнен на боковой стороне стакана на уровне дна чаши, сопла - в стакане под каналом и обращены в сторону чаши, а питатель снабжен установленным с возможностью вертикального перемещения под каналом тол кателем и отсекателями,расположенными над каналом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вибробункер | 1987 |
|
SU1522562A1 |
| Устройство ориентирования деталей | 1986 |
|
SU1356358A1 |
| Устройство для крепления кнопок на изделии | 1990 |
|
SU1784216A1 |
| Устройство для вторичного ориентирования деталей | 1989 |
|
SU1791096A1 |
| Вибропитатель | 1987 |
|
SU1482092A1 |
| Устройство для подачи деталей | 1983 |
|
SU1152098A1 |
| Вибрационный бункерный питатель | 1984 |
|
SU1164033A1 |
| ПОЛУАВТОМАТ ДЛЯ ОШИПОВКИ ШИН, УСТРОЙСТВО ДЛЯ УСТАНОВКИ ШИПОВ, ГОЛОВКА ДЛЯ ЭТОГО УСТРОЙСТВА И СПОСОБ ОШИПОВКИ ШИН | 1998 |
|
RU2138403C1 |
| КЛАПАН-ОТСЕКАТЕЛЬ | 2017 |
|
RU2644312C1 |
| УСТРОЙСТВО ДЛЯ ЗАПРЕССОВКИ ДЕТАЛЕЙ | 1992 |
|
RU2036768C1 |
Изобретение относится к механической обработке, в частности к устройствам для механизации и автоматизации машиностроительного производства, и может быть использовано в качестве вспомогательных средств промышленных роботов и устройств для ориентирования деталей (грузов) в установках сборки и пошту чной вьщачи. Цель изобретения- расьчирение технологических возможностей путем обеспечения выдачи объемных грузов различной фор мы. Питатель содержит корпус 1, чашу 2, генератор 3 колебаний чаши 2, толкатель 4. Корпус 1 выполнен в виде стакана 5 с фланцем 6 и дном 7. Члша 2 охватывает стакан 5, рясгтоложенл ил корпусе 1 и опирается опирой 9. В i стакане 5 на уровне дня I1 чаши 2 выполнен канал 12 для прохода деталей из чаши 2 в центральное отверстие 13 стакана 5. Вы1че канала 12 размещено два-три отсекателя 14 в пазах. Генератор 3 колебаний выполнен п виде ряда резьбовых втулок с профилированными каналами, представлякищг-ш собой сопла. Толкатель 4 размещен в центральном отверстии 13 стакана 5 и опирается на дно 7 корпуса 1. Торцовая поверхность толкателя 4 расположена несколько ниже канала 12. В дне 7 выполнен канал 25, соединенный с источником рабочей среды. При подаче рабочей среды она ускоряется в соплах и взаимодействуют: с поверхностью опоры 9, приводя чашу 2 в колебание и вращение. Грузы по дну II перемещаются в отверстие 13 над толкателем 4. Толкатель 4 перемеь-.ает груз в(,пче от- секателей 14, обеспечивая тем самым верхнюю выдачу деталей и ориентирование их по угловой координате. I7 ил. С (Л СП со
/4-/1
12
ОСЬ
,
10
Фиг.
фиг. 1
5 -В
Фиг. 5
25 риг. 7
32
Фиг. 8
17
(pus. 6
Ю
Фие.Ю
Фиг. 13
(fiUB-ff
НО
Ц7 50 itS ff8
5
55
5J
5J
фиг. 15
фиг. 16
13
11
.
V
777Г7 / У:
У/7//7//
Г ч ч С
$
- - -------
Ч25
Фиг. 77
2426 3
| Устройство для разгрузки вибробункера | 1982 |
|
SU1041471A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
