(89) (48) (21) (22) (31) (32) (33) (46) (71)
CS/252581 21.05.87 777Д265/25-08 01.09.86
8753-85
12.85
PN 02.
CS
07.11.89. Бкш. № 41
3BJI Научно-исследовательский институт подшипников качения - Организация концерна ЗВЛ, Брно (CS) (72) Мирослав Мапец, Йосеф Балшик, Антонин Кармазлн и Милош Скочовскн (CS) (53) 62-229.6 (088.8)
(54) ЗАГРУЗОЧНО-РАЗГРУЗОЧНОЕ УСТРОЙСТВО
(57) Изобретение касается устройства для автоматического обмена вращающихся деталей, в oco6eHJiocTH валиков и втулок двухрядных подшипников качения , подшипниковых колец или тел качения в процессе их окончательной обработки, Цель изобретения - расширение функииональш11х возможностей усгройсгва, Для этого загрузочно-раз- грузочное устройство, содержащее основание 1 , на котором -закреплен подводящий лоток 18 с механизмом поштуч(Л
ной выдачи, вы11олиен 1ый в виде заслонки 19, установленной с возможностью поворота относительно оси 20, два ролика 11, 12, установленных с возможностью поворота относительно валов 2, 3 и образующих ложемент для детали в зоне обработки, сбрасыватель, выполненный в виде зуба, закрепленного на валу 3, отводящий лоток 27,
снабжено толкателем, выг1олнен1 ым в виде упора 5, закренаенного на валу 2, с возможностью взаимодействия с зас- лонкой 19. Валы 2, 3 связаны между собой механической связью и установлены с возможностью реверсивного поворота от микродвигателя. Для управления работой устройства имеются конт- рольные датчики. 1 з.п.ф-лы, 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочное устройство для бесцентровых круглошлифовальных станков | 1988 |
|
SU1579715A1 |
| Автоматическая линия для изготовления деталей типа скоб | 1982 |
|
SU1134351A1 |
| Загрузочно-разгрузочное устройство | 1985 |
|
SU1247230A1 |
| Станок для сборки узлов запрессовкой | 1978 |
|
SU745642A1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ И СОРТИРОВКИ КОЛЕЦ ПОДШИПНИКОВ | 1991 |
|
RU2016673C1 |
| Линия для пайки | 1986 |
|
SU1433665A1 |
| Устройство для нанесения обрабатывающего раствора на поверхность цилиндрических изделий | 1980 |
|
SU912792A1 |
| Станок для абразивной обработки ко-лЕц пОдшипНиКОВ КАчЕНия | 1979 |
|
SU837787A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ДЕТАЛЕЙ | 1998 |
|
RU2130373C1 |
| Устройство для поштучной выдачи деталей из сплошного потока | 1980 |
|
SU921776A1 |
Изобретение касается устройства для автоматического обмена вращающихся деталей, в особенности валиков и втулок двухрядных подшипников качения, подшипниковых колец или тел качения в процессе их окончательной обработки. Цель изобретения - расширение функциональных возможностей устройства. Для этого загрузочно-разгрузочное устройство, содержащее основание 1, на котором закреплен подводящий лоток 18 с механизмом поштучной выдачи, выполненный в виде заслонки 19, установленной с возможностью поворота относительно оси 20, два ролика 11, 12, установленных с возможностью поворота относительно валов 2, 3 и образующих ложемент для детали в зоне обработки, сбрасыватель, выполненный в виде зуба 7, закрепленного на валу 3, отводящий лоток 27, снабжено толкателем, выполненным в виде упора 5, закрепленного на валу 2, с возможностью взаимодействия с заслонкой 19. Валы 2, 3 связаны между собой механической связью и установлены с возможностью реверсивного поворота от микродвигателя. Для управления работой устройства имеются контрольные датчики. 1 з.п. ф-лы, 2 ил.
.-
Изобретение касается устройства для автоматического обмена вращающихся деталей, в особенности валиков и втулок двухрядщ ж подшипников ка- че1тя, подшипниковых колец или тел качения в процессе их окончательной обработки,
Известно 3 агрузочно-раз грузочное устройство, содержащее основание, закрепленный на нем подводящий лоток с механизмом поштучной выдачи, два ролика, установленных с возможностью поворота и образующих ложемент для детали в зоне обработки, сбрасыватель выполненный в виде зуба, закрепленного на валу поворота одного из роли- ков, привод поворота и отводящий лото (Налов А,Н. Загрузочные устройства для металлорежущих станков,М,: Малти- ностроение, 1972, с, 300, рис. 203),
Недостатком известного устройства является невозможность принудительной подачи деталей на ролики.
Цель изобретения - расширение функциональных возможностей устройства.
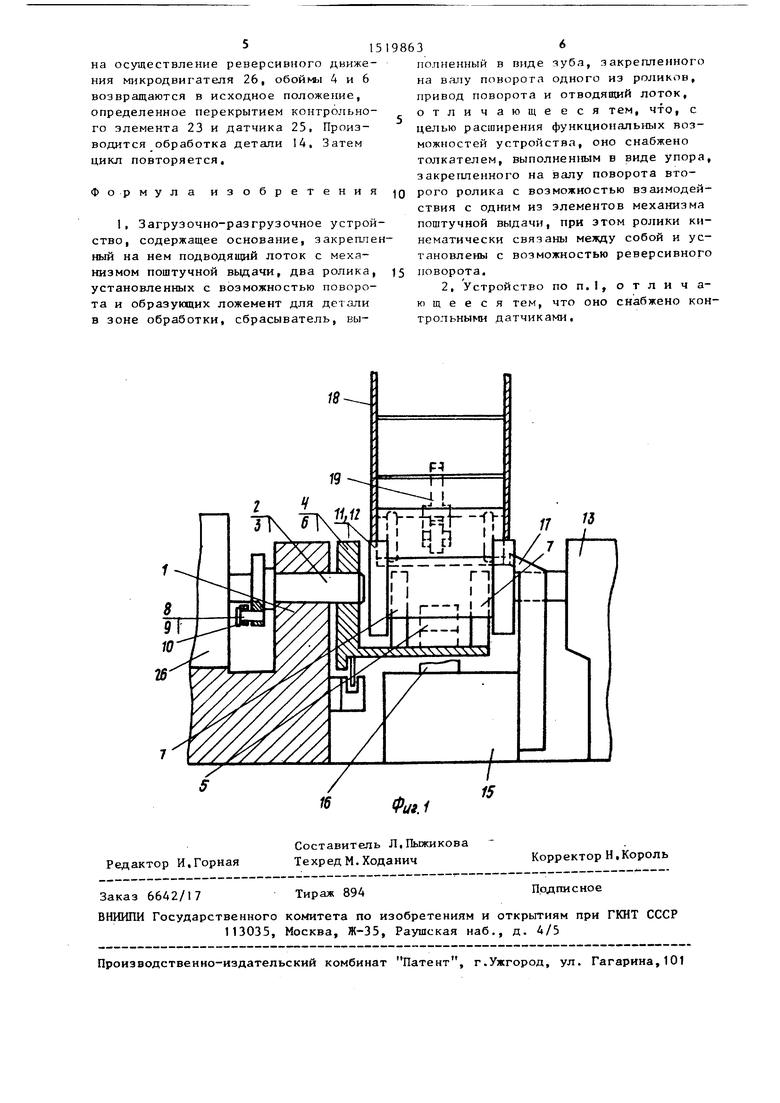
На фиг. 1 показано предлагаемое устройство, осевое сечение; на фиг,2 то же, продольное сечение.
Загрузочно-раз груз очное устройство состоит из основания 1, в котором расположены паралельно два вала 2 и 3 с возможностью поворота, на свободных концах которых расположены обоймы.
На валу 2 расположена загрузочная
обойма А с толкателем, выполненным в виде упора 5, на валу 3 разгрузочная обойма 6 со сбрасывателем, выполненным в виде зуба 7, Оба вала 2 и 3 снабжены эксцентрическими цапфами 8 и 9, которые расположены на тяг-е 10, в результате чего, образуется механическая связь между обоими валами 2 и 3. На последрщх соответственно уста25
20
, ЗО к
5
дО -
дз
50
55
новлеШ) ролики 11 и 12, Валы 2 и 3 установлены с возможностью поворота в корпусе шпиндельной головки 13,
Обрабатываемая деталь 14, например втулка двухрядного шарикоподщипника, Б процессе обработки радиально втаскивается между роликами II и 12 силой притяжения электромагнита 15, действующего через радиальный полюсный наконечник 16 и осевой полюсный наконечник 17. Подводящий лоток 18 снабжен механизмом штучной выдачи, выполненным в виде заслонки 19, установленной с возможностью поворота относительно оси 20, Заслонка 19 снабжена роликом 21, закрепленным на ее свободном конце, который взаимодействует с упором 5, вращающимся относительно вала 2. Разгрузочная обойма 6 снабжена перемещаемым элементом 23 для контроля положения деталей, выпол- нешым, например, в виде диафрагма, служащей для прекращения оптоэлек- тронной цепи, и упором 22, служащим для управления, или датчиком 25 положения деталей, или выключателем 2А, управляющим действием микродвигателя 26. В радиальном направлении относительно разгрузочной обоймы 6 расположен отводящий лоток 27.
Загруз очно-раз грузочное устройство работает следующим образом,
При включении микродвигателя 26, который приводит в движение валы 2 и 3 соответственно осуществляется поворот обойм 4 и 6, зуб 7 захватывает обработанную деталь 14, находящуюся на роликах П и 12 и подает ее в отводящий лоток 27, При этом упор 5 взаимодействует с роликом 21, поднимает заслонку 19 и деталь 14 поступает из подводящего лотка 18 на ролики 11 и 12. В этот момент упор 22 включает выключатель 24, который дает команду
15
на осуществление реверсивного движения микродвигателя 26, обоймы 4 и 6 возвращаются в исходное положение, определенное перекрытием контрольного элемента 23 и датчика 25, Производится обработка детали 14, Затем цикл повторяется.
Формула изобретения
1, Загруэочно-разгрузочное устройство, содержащее основание, закреплен ный на нем подводящий лоток с механизмом поштучной выдачи, два ролика, установленных с возможностью поворота и образующих ложемент для детали в зоне обработки, сбрасыватель, вы3А
полненный в виде зуба, закрепленного на валу поворота одного из роликов, привод поворота и отводящий лоток, отличающееся тем, что, с целью расширения функциональных возможностей устройства, оно снабжено толкателем, выполненным в виде упора, закрепленного на валу поворота вто- рого ролика с возможностью взаимодействия с одним из элементов механизма поштучной выдачи, при этом ролики кинематически связаны мелучу собой и установлены с возможностью реверсивного
поворота,
2, Устройство по п.I, о т л и ч а- ю щ е е с я тем, что оно снабжено контрольными датчиками.
Фиг.1
