Изобретение с.носится к грузозахват-: ным устройствам для захвата грузов с прямоугольным поперечным сечением по диагональной схеме, воздействующих на груз через нижнее переднее и заднее верхнее ребра.
Известны грузозахватные устройства для погрузки прямоугольных грузов путем захвата за нижнее переднее и заднее верхнее ребра, содержащие шарнирно соединенные несущий и удерживающий рычаги, управляющий рычаг, шарнирные стержни и грузовую серьгу.
Наиболее близким к заявляемому является грузозахватное устройство, содержащее Г-образный подхватный рычаг с
отогнутым вверх концом верхней полки, треугольный рычаг с направляющей для расположения на ней подвески на крюк грузоподъемной машины, шарнирно соединенный вершиной с верхней полкой подхватного рычага, Г-образный орган, шарнирно соединенный своим сгибом со сгибом отогнутой части конца верхней полки, шарнирную тягу, соединяющую- треугольный рычаг и один конец Г-образиого органа, упор в виде двуплечего рычага, шарнирно соединенный средней частью с другим концом Г-образного органа, и шарнирную тягу, соединяющую верхнее плечо упора и отогнутый вверх конец верхней полки подхватного рычага.
vl
4 О СО
-N
Это грузозахватное устройство не обеспечивает сохранности несвязанной стопы штучных грузов при захвате за нижнее переднее и заднее верхнее ребра. Горизонтальное усилие, передаваемое со стороны упора на верхний груз приводит к его сдвигу и разрушению стопы. Несвязанные стопы штучных грузов укладывают на поддоны и погружают с помощью вильчатых погрузчиков.
Поддоны имеют значительную стоимость, а применение их приводит к росту объемов штабелей и складских помещений.
Целью изобретения является расширение эксплуатационных возможностей грузозахватных устройств путем обеспечения захвата отделенной прокладками несвязанной стопы штучных грузов без поддона.
Поставленная цель достигается тем, что в грузозахватном устройстве, содержащем несущий рычаг, выполненный с консолью в в 1хней части, установленный на ней на горизонтальной оси удерживающий двуплечий рычаг, расположенный вдоль несущего рычага, шарнирно закрепленный в центральной части консоли несущего рычага уп- равляющий рычаг, выполненный с направляющей с отогнутыми вверх концами, расположенной продольно верхней его стороне, расположенную на направляющей подвеску для крюка грузоподъемной машины и шарнирную тягу, закрепленную одним своим концом на конце управляющего рычага, горизонтальная ось удерживающего двуплечего рычага закреплена на конце консоли несущего рычага, поперечно его плоскости, второй конец шарнирной тяги закреплен на верхнем плече удерживающего рычага, нижнее плечо которого выполнено удлиненным.
Двуплечий удерживающий рычаг, фиксируемый при подъеме стопы шарнирной тягой и управляющим рычагом, взаимодействует со стопой по всей высоте и передает горизонтальное усилие, препятствующее опрокидыванию стопы относительно запле- чика несущего рычага на нижнюю часть сто- пы, которая под действием сил трения между горизонтальными поверхностями грузов работает слитно и выполняет роль основания, на котором стоит остальная часть стопы.
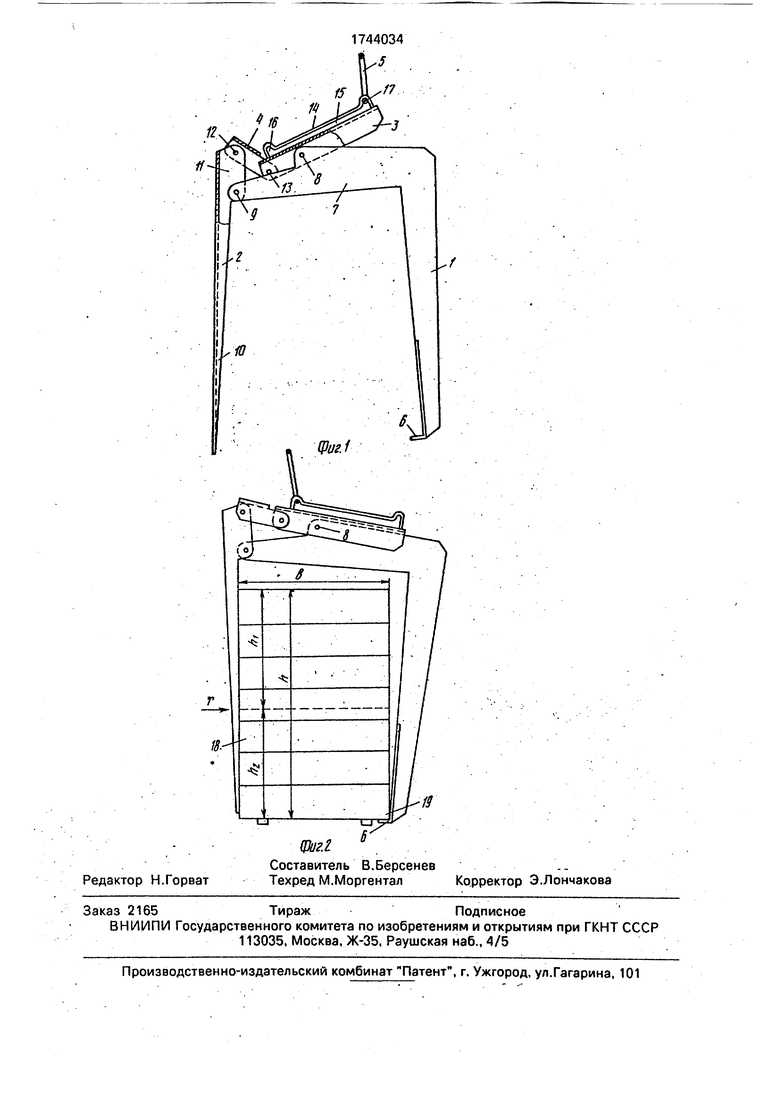
На фиг. 1 показано поднятое за подвеску для кр.ока подъемной машины раскрытое грузозахватное устройство; на фиг. 2 - замкнутое грузозахватное устройство с поднятой им стопой штучных грузов.
Грузозахватное устройство состоит из несущего рычага 1, удерживающего двуплечего рычага 2, управляющего рычага 3, шарнирной тяги 4 и подвески 5 для крюка подь- емного механизма.
Свободный конец несущего рычага имеет заплечик б для взаимодействия с нижней
передней кромкой стопы, а противоположный заплечику 6 конец рычага выполнен с консолью 7, которая в центральной части шарниром 8 соединена с управляющим рычагом 3. Управляющий рычаг выполнен с
направляющей 14, расположенной продольно верхней его стороне. Концы направляющей отогнуты вверх и образуют петлю замыкания 16 и петлю размыкания 17. Концы этих петель укреплены на управляющем
рычаге 3.
На направляющую 14 надета подвеска 5, предназначенная для навешивания грузозахватного устройства на крюк грузоподъемного крана. Со стороны петли
замыкания 16 управляющий рычаг 3 шарниром 13 соединен с одним концом тяги 14.
Горизонтальная ось 9 удерживающего двуплечего рычага 2 закреплена на конце консоли 7 несущего рычага 1, а второй конец
шарнирной тяги 4 посредством шарнира 12 закреплен на верхнем плече 11 двуплечего рычага, нижний конец которого 10 выполнен удлиненным.
Грузозахватное устройство работает
следующим образом.
Устройство поднимают за подвеску 5, находящуюся в петле размыкания 17. При этом происходит поворот управляющего рычага против часовой стрелки и шарниры
8-13-12 располагаются по ломаной линии, двуплечий рычаг поворачивается в направлении часовой стрелки и грузозахватное устройство занимает исходное положение для захвата стопы.
Далее устройство надевают на стопу, переводят подвеску 5 в петлю замыкания 16 и начинают подъем крюка подъемной машины. При этом произойдет поворот управляющего рычага 3 по часовой стрелке, шарнир
13 выйдет на прямую линию между шарнирами 8 и 12 (фиг. 2), и длинное плечо 10 двуплечего удерживающего рычага будет прижато к вертикальной поверхности стопы с противоположной несущему рычагу 1 стороны. Произойдет сближение несущего рычага 1 и нижнего конца 10 удерживающего двуплечего рычага 2 и заплечик 6 войдет в зазор под нижний передний угол 19 стопы, а двуплечий удерживающий рычаг 2 будет
зафиксирован в рабочем положении плечом 8-13 управляющего рычага 3 и тягой 4, удерживаемых подъемным усилием на прямой линии.
Дальнейший подъем крюка приведет к
подъему стопы 18 заплечиком 6 несущего
рычага 1 за нижнюю кромку 19 стопы. При этом удерживающий двуплечий рычаг не позволит стопе опрокинуться относительно заплечика 6 при условии, что под действием сил трения между грузами нижняя часть стопы будет работать слитно и выполнит роль основания, на котором будут стоять остальные грузы стопы, Для обеспечения этого условия необходимо, чтобы силы трения между грузами в нижней части стопы были больше горизонтального усилия Т, передаваемого от двуплечего удерживающего рычага 2 на стопу 18.
Взаимодействие удерживающего рычага 2 с поверхностью стопы носит весьма сложный характер и для упрощения расчетов принято, что вся горизонтальная сила Т, передаваемая со стороны двуплечего удерживающего рычага на стопу 18, приложена в верхней точке ее зоны, в которой грузы работают слитно. На основании принятого допущения расстояние hi от верхней кромки стопы до этой точки можно определить исходя из равновесия силы Т и силы трения F между грузами. Эти силы могут быть определены с помощью зависимостей:
q hb
TW
и F fqhi
Приравнивая правые части этих зависимостей и принимая во внимание, что h hi+h2, можно получить квадратное уравнение, корни которого будут
k h . Vn2 h b h,- ±
где h - высота стопы (фиг. 2); b - ширина стопы; hi - расстояние от верхней кромки стопы до зоны, в которой грузы работают слитно; ha - высота этой зоны; f - коэффициент трения между грузами; q - погонная нагрузка стопы по высоте.
В частном случае, когда подкоренное выражение равно нулю, ,5h. Это соотношение справедливо при
h-2 f
Определив по предлагаемой методике h2, вычисляют величину силы Т и используют ее при расчетах на прочность рычагов 1 и 2. После установки перемещаемой стопы 5 на приемную площадку или в штабель снимают нагрузку с подвески 5, переводят ее в петлю размыкания 17 и начинают подъем крюка. При этом управляющий рычаг 3 повернется против часовой стрелки, удержи0 вающий рычаг 2 отойдет от поверхности стопы и так как общий центр тяжести устройства расположен левее петли размыкания 17, то заплечик б выйдет из-под нижней кромки 19 стопы. Дальнейшим подъемом
5 крюка снимают устройство со стопы и начинают операции по захвату, подъему и ранс- портированию следующей несвязанной стопы
Формула изобретения
0 Грузозахватное устройство, содержащее несущий рычаг, выполненный с консолью в верхней части, установленный на горизонтальной оси удерживающий двуплечий рычаг для контакта стоковой поверхно5 стью груза, расположенный вдоль несущего рычага, шарнирно закрепленный в центральной части консоли несущего рычага уп- равляющий рычаг, выполненный с направляющей, расположенной продольно
0 верхней его стороне с отогнутыми вверх концами, расположенную в направляющей подвеску для крюка подъемной машины и шарнирную тягу, закрепленную одним своим концом на конце управляющего рычага,
5 отличающееся тем, что, с целью расширения эксплуатационных возможностей путем обеспечения захвата несвязанной стопы штучного груза, горизонтальная ось удерживающего двуплечего рычага за0 креплена на конце консоли несущего рычага поперечно его плоскости, другой конец шарнирной тяги закреплен на верхнем плече двуплечего удерживающего рычага, выполненного удлиненным.
5
12
18Редактор Н.Горват
фиг.2.
Составитель В.Берсенев Техред М.МоргенталКорректор Э.Лончакова
19
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1990 |
|
SU1794847A1 |
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
| Грузозахватное устройство | 1988 |
|
SU1572976A1 |
| Грузозахватное кантующее устройство | 1979 |
|
SU981181A1 |
| Грузозахватное устройство | 1987 |
|
SU1418260A1 |
| Грузозахватная система | 1989 |
|
SU1768491A1 |
| Грузозахватное устройство | 1991 |
|
SU1798288A1 |
| Автоматический захват | 1971 |
|
SU537020A1 |
| УРАВНОВЕШЕННЫЙ КРАНОВЫЙ ВИЛОЧНЫЙЗАХВАТ | 1971 |
|
SU420535A1 |
| Грузозахватное устройство | 1989 |
|
SU1776623A1 |
Использование: грузозахватные устройства для погрузки штучных грузов вертикальными стопами. Сущность изобретения: грузозахватное устройство содержит несущий рычаг, выполненный с консолью в ниж- ней части, установленный на горизонтальной оси удерживающий двуплечий рычаг, расположенный вдоль несущего рычага, шарнирно закрепленный в центральной части консоли несущего рычага, уп- равляющий рычаг, выполненный с направляющей с отогнутыми вверх концами, расположенной продольной его верхней . стороне, расположенную в направляющей подвеску для крюка грузоподъемной машины и шарнирную тягу, закрепленную одним концом на конце управляющего рычага. Горизонтальная ось удерживающего двуплечего рычага закреплена на конце консоли несущего рычага поперечно его плоскости. . Второй конец шарнирной тяги закреплен на верхнем плече двуплечего удерживающего рычага, а нижнее его плечо выполнено удлиненным, 2 ил. (Л
| Грузозахватное устройство | 1987 |
|
SU1418260A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
