Фиг.З
сл
ел го
ел о
N5
Изобретение относится к транспортному ман1ино ;троеник), в частности к шарнирио соч. 1ененн1)1м транспортным средствам с активными звеньями.
Цель изобретеиня расширение техно- .югических Е1озможн()сте11 нутем новьинения маневрен.ности,
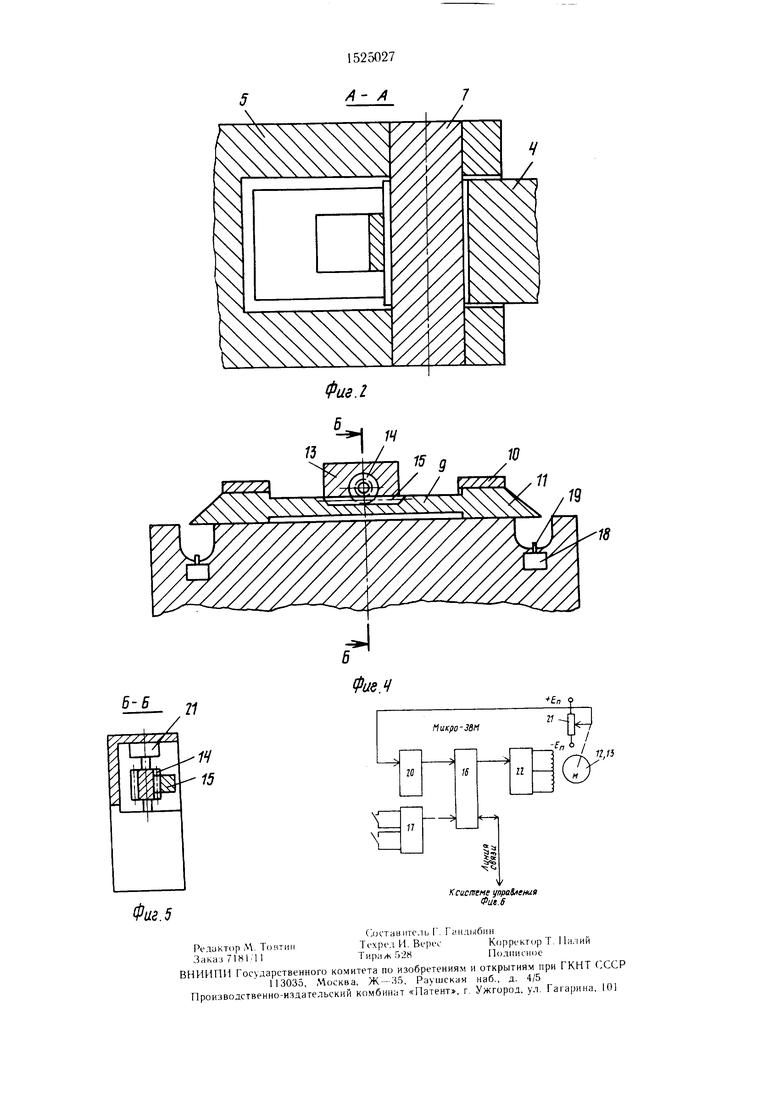
На (пп . 1 изображено сцепное устройство сочлененногч) транспортного средства; на фнг. 2 - разрез Л- А на фиг. 1; на фиг. .) сценное устройство в момент поворота зве ньев; на фиг. 4 -- фиксатор двустороннего действия; на (})И1 5 разрез Б - Б на фиг. 4 на (|nir. t) - cipvKTNpiiaH схема устройства уирав.1енин фиксатором
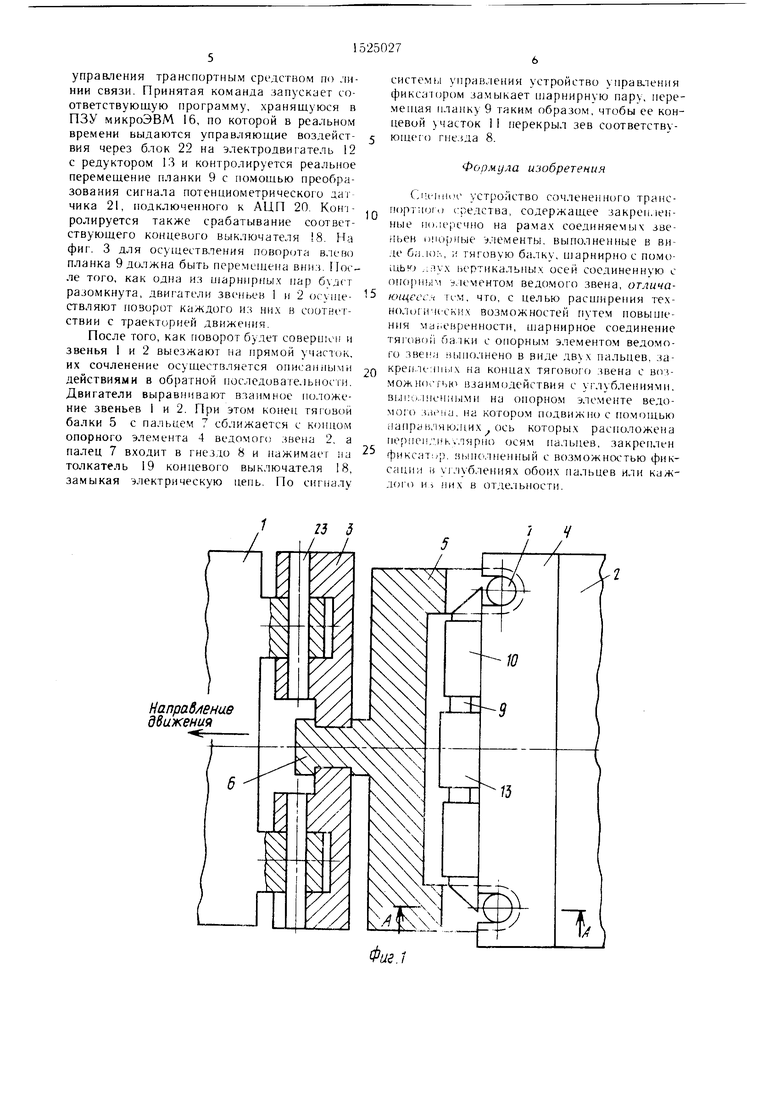
(цепное устройство сочлененного трап- сцортного средства содержит закрепленные на рама.х соединяемых ведущего и ведомого звеньев 1, 2 опорные элементы 3. 4 и тяговую балку 5, н арнирно соединенную с опорным :);|е.ментом 4 и прикрепленную к опорному элементу 3 посредством горизонтального niapniipa 6 с возможностью поворота вокруг продо.чьной оси транспортного средства. Термины «ведущее и «ведомое присвоены яканьям 1. 2 условно, так как трансмюртное с)едство имеет возможность 11еремеп1аться в произвольном направлении и каждое его звено (а их может быть несколько) имеет приводной дви1 атель.
(Л1еппое усгройство снабжено фнксато- ро.м двусторонпе1 о действия, на концах тяго- isoii ба.1ки 5 закрегмены пальцы 7, а па концах опорного элемента 4 ведомого звена 2 выполнены ответные углубления 8, образующие с 11аль 1ам11 7 раз ьемные шарнирные пары, взаимодействующие с фиксаторо.м, ко- Т1;рыи выполнен в виде планки 9, установ- леипо в направляющей 10, закрепленной на опорном элементе 4. Плапка 9 установлена с возможностью возвратно-поступа- ге.лыюго переме1пения и перекрывает своими концевыми участками 11 зев1)1 Г незд 8 с размещенными в них на:1ьцами 7.
Привод планки 9 может быть осуществлен с помощью улекгродвигателя 12 с редук- гором 13, .(убчатое к(;лес() 14 которого входит в зацеплеппе с зубчатой рейкой 15, связанной с планкой 9 (фиг. 4, 5).
Транспортное средство имеет устройство управления фиксат()Н)м двойного действия, которое построено на основе одно 1лат- Hoii микроэвм 16, включаюн1ей микропроцессор, ОЗУ, 113У, б, 1ок последо15ательног() ввода-вывода д;1я связи с системо) унрав- .К нии транспортным средством (условно не показаны), входные и выходные Н1ины. К нер- Boii Г1)п11е входных ищи микроЭВМ 16 подключен б,-и)к 17 ввода релейньгх сигна, 1ов, вьп1о,1 HtMiHbiii на оптронах и perncipax. Вхо- д)| блока 17 ввода ре;1ейных сигналов соединены с концевыми выключателями 18, уста
0
5
0
5
0
5
0
5
иовленными в гнезда.х 8 и своими юд11ружи- ненными толкателями 19 взаимодействух:- щими с па.льца.ми 7 разъемных Н1арнирных пар. К второй группе входных шин подключены выходы кода аналого-цифрово1 о преобразователя 20, вход которого связан с по- тенциометрическим датчиком 21 перемещения планки 9. Выходные щины микроЭВМ 16 соединены с входами блока 22 формирования управляющих воздействий, выпачненно- го на основе цифроаналогового преобразователя, выходы которого через усилители -подключены к обмотке возбуждения :)лектродви- гателя 12 (фиг. 5, 6).
О|1ор1|ЫЙ элемент 3 соединен с ведущим звеном 1 посредством горизонтальных шарниров 23.
Сцегпюе устройство сочлененного транспортного срел.ства работает следующим образом.
При установившемся режиме движения тя:ч)В(Н уси, 1ие от ведущего звена 1 передается через Н1арниры 23 и шарнир 6 на опорный элемент 3 и тяговую балку 5 и далее через ща)нирные пары, образовапные пальпа.ми 7 в гнездах 8, на опорный элемент 4 и ведомое звено 2 (фиг. 1). Звенья 1 и 2 при этом сочленены, щарнирные нары замкнуты, а концевые участки 11 планки 9 удерживают пальцы 7 в гнездах 8. Когда палец 7 находптся в гнезде 8, он контактирует с толкателем 19 концевого выключателя 18.
Для осуществления новорота одна из пшрнирных lap на концах тяговой балки 5 должна быть разъединена. На фиг . 3 для осуществления новорота влево (по направ- ле1шю движения) должна быть разъединена верхняя (правая) п арнирная нара. Для этого нланка 9 фиксатора должна быть перемещена из своего 11ервоначально1 о положения таким образом, чтобы ее концевой участок
I1 открыл зев одного из гнезд 8 (в данном случае правого). Тогда при развороте звеньев 1 и 2 один из пальцев 7 (правый, верхний) выходит из гнезда 8. Этот процесс происходит по команде микроЭВМ 16, которая подает сигнал в Ц. (22). Электродвигатель 12 приводит в действие зубчато- реечную передачу (фиг. 4, 5), которая смещает планку 9 и открывает зев гнезда 8. Положение ко)1цевого участка 1 1 планки 9 он- ределяется по положению движка потенциометра 21. После выхода концевого участка
IIза зев гнезда 8 электродвигатель 12 останавливается и транснортное средство готово к повороту. Движениями планки 9 и состоянием разъемных шарнирных пар ун- равляет устройство, изображенное на фиг. 6, работа которого заключается в следующем.
Устройство у 1равления фиксатором для совершения маневра по,тучает команду о на- прав. 1ении и времени поворота от системы
управления транспортным средством по линии связи. Принятая команда запускает соответствующую программу, хранящуюся в ПЗУ микроэвм 16, по которой в реальном времени выдаются управляющие воздействия через блок 22 на электродвигатель 12 с редуктором 13 и контролируется реальное перемещение планки 9 с помощью преобразования сигнала потенциометрического дат чика 21, подключенного к АЦП 20. Контролируется также срабатывание соответствующего концевого выключателя 18. На фиг. 3 для осуществления поворота B. ieno планка 9 должна быть пере.мепхена вни.ч. После того, как одна из П1арнпрных пар будет разомкнута, двигатели звеньев 1 и 2 осуществляют FiOBopoT каждого и.ч них в соответствии с траекторпен движения.
После того, как поворот будет соверп10 | и звенья 1 и 2 выезжают на прямой учапчж, их сочленение осуществляется описанными действиями в обратной последовательности. Двигатели выравнивают взаимное положение звеньев 1 и 2. При этом конец тяговой балки 5 с пальцем 7 сближается с концом опорного элемента 4 ведомог :) звена 2, а палец 7 входит в гнездо 8 и нажимает iia толкатель 19 концевого выключателя 18, замыкая электрическую цепь. По сигн алу
0
0
5
системы управлении устройство управления фиксак ром замыкает шарнирную пару, пере- .мен1ая планку 9 таким образом, чтобы ее концевой часток 11 перекрыл зев соответствующего гпе.(да 8.
Формула изобретения
Ciu-iiiico устройство сочлененного транспортного средства, содержащее закреп,leii- ные i(),iepc4Ho на рамах соединяемых зве- пьен опорные э.пементы. выполненные в ви- jie ба.юь, . тнговую балку, П1арнирно с помощью .;ау. вертикальных осей соединенную с опо|1ным :;лементом ведомого звена, отличающееся гс.м, что, с целью расщирения тех- нологич(-ских возможностей путем новыще- ния мапевренности, щарнирное соединение ба.жи с опорным элементом ведомого звена HbUKX iHeHO в виде двух пальцев, за- кре11.л.-;11и 1 на концах тяговогг; звена с воз- можно :-гьк взаимодействия с углублениями, В1,..:|нсип1 1мп на онорном элементе ведомого 3,uMi;.i. на котором подвижн(.с помощью направляю.цих ось которых расположена ne(Miei, MfK.лярно ося.м пальцев, закреплен фиксат;;р. н .TненныИ с возможностью фиксация н 1 чублеппях обоих пальцев или каж- ЛО1Ч) и 5 них в отдельности.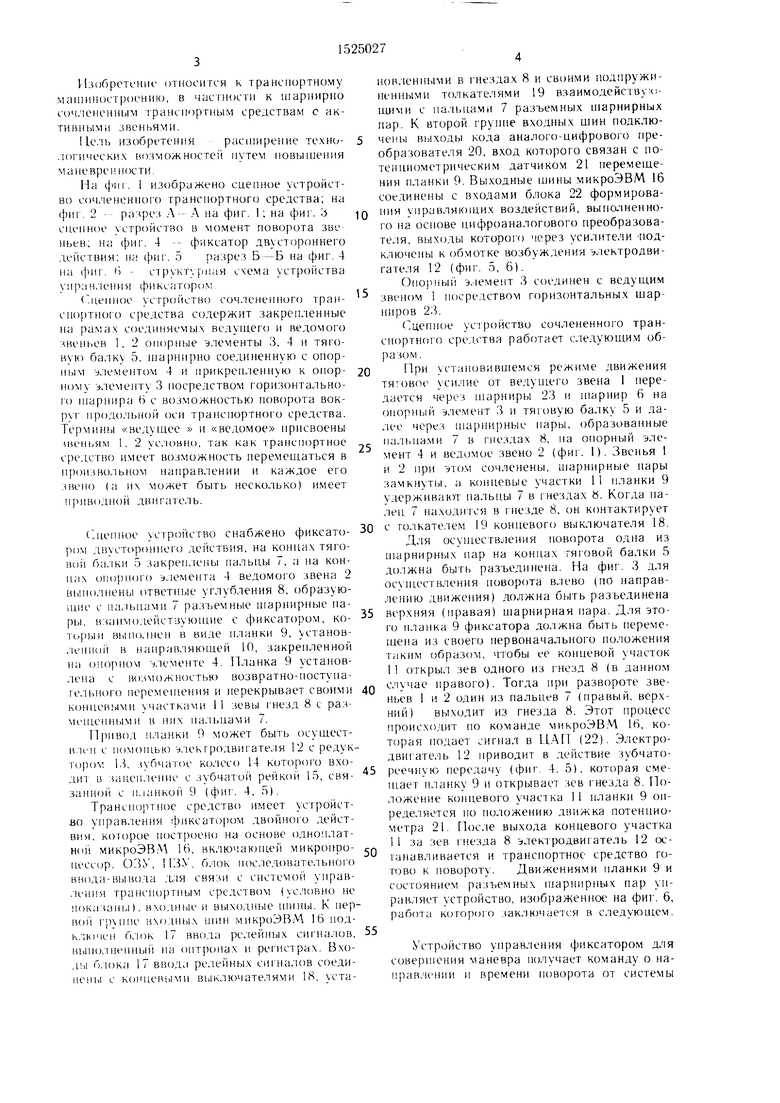
| название | год | авторы | номер документа |
|---|---|---|---|
| Сцепное устройство сочлененного трактора | 1986 |
|
SU1425098A1 |
| Сочлененное транспортное средство | 1986 |
|
SU1357299A1 |
| Задающее устройство манипулятора | 1989 |
|
SU1606271A1 |
| СЦЕПНОЕ УСТРОЙСТВО СОЧЛЕНЕННОГО ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2049679C1 |
| Подвеска транспортного средства | 1988 |
|
SU1507600A1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2007 |
|
RU2354603C1 |
| Сцепное устройство шарнирно-сочлененного транспортного средства | 1985 |
|
SU1260264A1 |
| Манипулятор | 1983 |
|
SU1183360A1 |
| Гусеничная цепь транспортного средства | 2019 |
|
RU2713332C1 |
| Сцепное устройство сочлененного транспортного средства | 1985 |
|
SU1273267A1 |
Изобретение относится к транспортному машиностроению, в частности к шарнирно сочлененным транспортным средствам с активными звеньями. Цель изобретения - расширение технологических возможностей путем повышения маневренности. Сцепное устройство сочлененного транспортного средства содержит закрепленные на рамах соединяемых ведущего и ведомого звеньев 1 и 2 опорные элементы 3 и 4, тяговую балку 5, шарнирно соединенную с элементом 4 и прикрепленную к элементу 3 горизонтальным шарниром, а также фиксатор 9 двухстроннего действия. На концах балки 5 закреплены пальцы 7, а на концах элемента 4 выполнены ответные углубления 8, образующие с пальцами 7 разъемные шарнирные пары. 6 ил.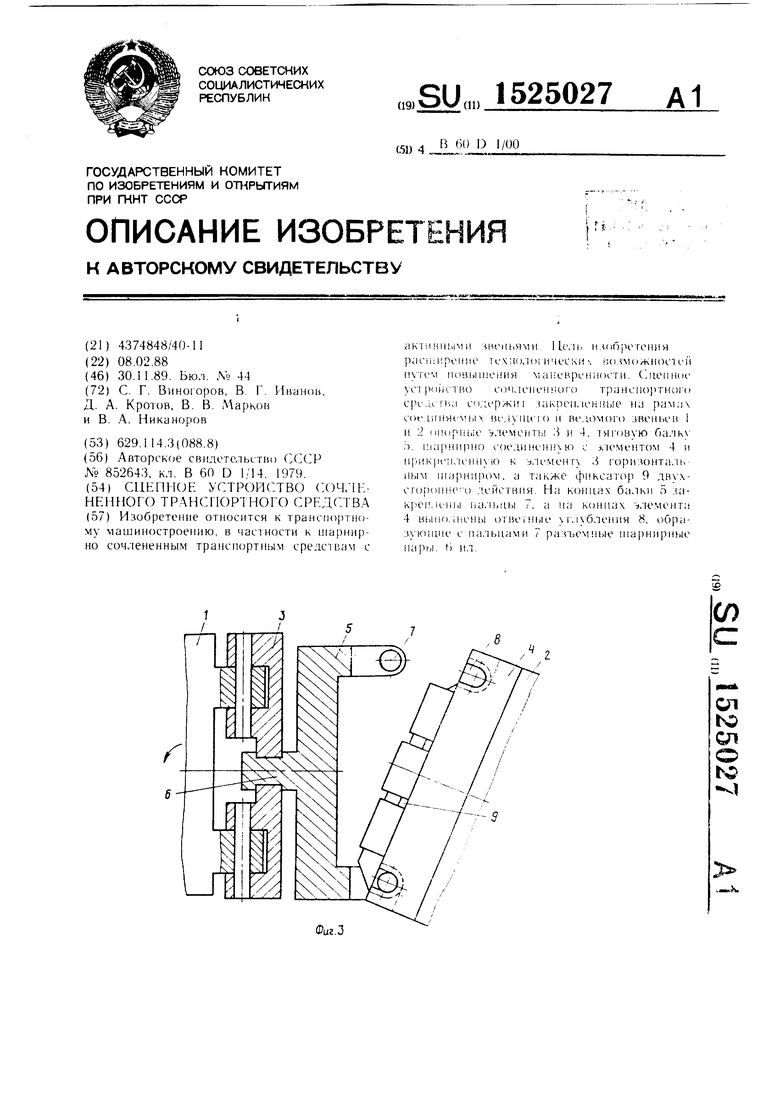
Иаправ/1енав движения
Фиг.1
6-Б
21
14 15
Фие.Ч
| Сцепное устройство сочлененногоТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU852643A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
