2, Манипулятор по п. 1, о т л ичающийся тем, что он снабжен дополнительным двуплечим рычагом, шанирно установленным на конце рабочег плеча основного двуплечего рычага, причем основной двуплечий рычаг с уравновешивающим плечом дополнительного двуплечего рычага образуют с введенными звеньями первый шарнирный параллелограммный механизм, при этом на звене параллелограммного механизма, параллельном основному двуплечему рычагу, закреплен дополнительный упругий элемент, кроме того уравновешивающее плечо основного двуплечего рычага вместе с частью колонны и двумя дополнительными ср- . ответственно введенными звеньями образует второй параллелограммньй механизм, при этом ось шарнира, соединяющего дополнительно введенные звенья, связана посредством гибких тяг с основным и дополнительным
пругими элементами, а параметры анипулятора связаны между собой ависимостью
и - . .
Kj
К,
де 2 длина уравновешивающего плеча дополнительного двуплечего рычага;
ь.длина дополнительно введенного звена второго параллелограммного механизма, параллельного колонне;
R, приведенная масса дополнительного двуплечего рычага , расстояние от оси шарнира крепления дополнительного двуплечего рычага к основному двуплечему рычагу до точки приложения приведенной. массы дополнительного двуплечего рычага ,
- жесткость дополнительного упругого элемента.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1321581A1 |
| Быстроразъемное соединение трубопроводов | 1987 |
|
SU1439350A1 |
| Манипулятор | 1980 |
|
SU929430A1 |
| ИЗМЕРИТЕЛЬНАЯ ВСТАВКА | 2011 |
|
RU2458326C1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Кисть манипулятора | 1987 |
|
SU1437217A1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| Механизм привода сдвижной двери | 2019 |
|
RU2726297C1 |
| Система для массажа вымени | 1990 |
|
SU1717020A1 |
| Пахотный агрегат | 1989 |
|
SU1777681A1 |
1. МАНИПУЛЯТОР, содержащий колонну, размещенную на основании, и шарнирно установленный на колонне основной двуплечий рычаг с устройством его уравновешивания, включающим ролик и основной упругий элемент, связанный посредством гибкой тяги с уравновешивающим плечом осно ного двуплечего рычага, отлича ющийся тем, что, с целью сниже ния материалоемкости и повьшения бы стродействия, параметры манипулятор связаны между собой следующей зависимо с т ь.ю ШСНСОЮЗНЛЙ 13 13 . , расстояние от оси шарнира крепления основного двуплечего рычага к колонне до точки крепления гибкой тяги к уравновешивающему плечу основного двуплечего рычага; расстояние от оси шарнира крепления основного двуплечего рычага к колонне до оси крепления ролика на колонне, приведенная масса основного двуплечего рычага; расстояние от оси шарнира крепления основного двуплечего рычага к колонне до точки приложения приведенной массы основного -двуплечего рычага; жесткость основного упругого элемента.
1
Изобретение относится к машиностроению, а именно к манипуляторам, которыми оснащаются тележки и прочие наземные транспортные средства, и может быть использовано при создании гибких автоматизированных производств, а также в приборостроении, на транспорте и в других отраслях народного хозяйства.
Цель изобретения - снижение материалоемкости и Повышение быстродействия путем введения дополнительного двуплечего рычага и соблюдения зависимостей, связывающих параметры манипулятора.
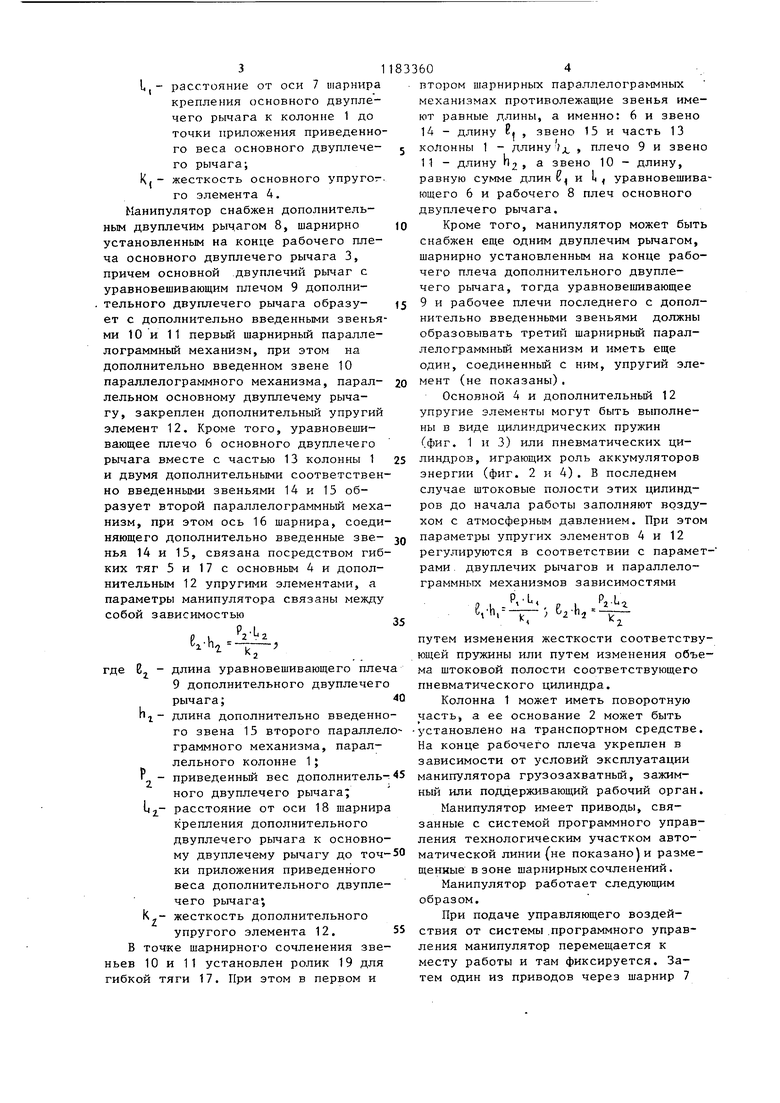
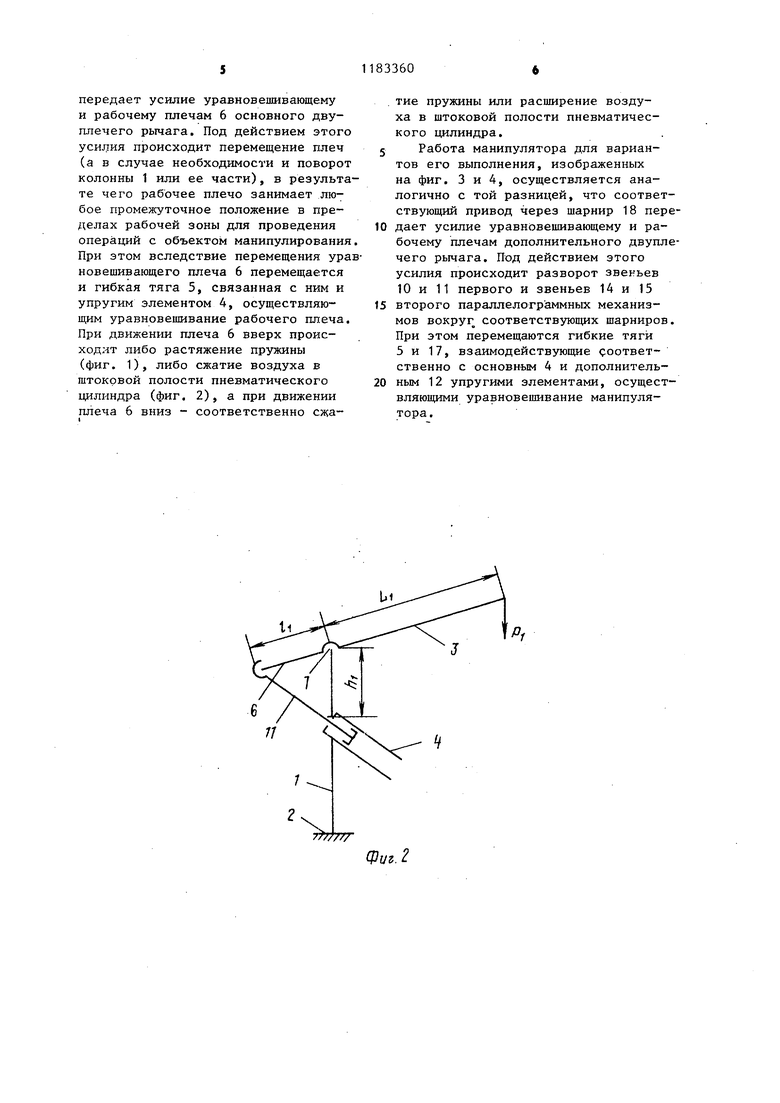
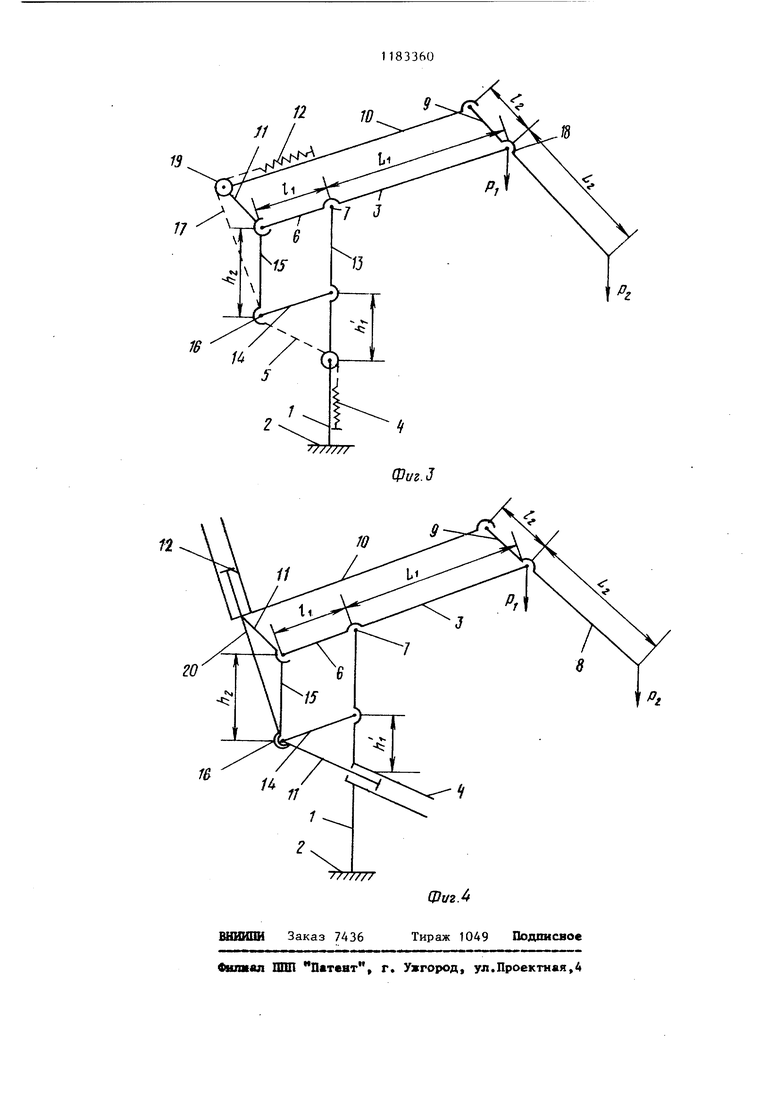
На фиг. 1 схематично изображен предлагаемый манипулятор с основным упругим элементом в виде цилиндрической пружины; на фиг. 2 - то же, с основным упругим элементом в виде. пневматического цилиндра; на фиг. 3то же, с основным и дополнительным упругими элементами в виде цилиндрических пружин; на фиг. 4 - то же, п основным и дополнительным упругиMil элементами в виде пневматических UH.rnif ;ipoB.
Манипулятор содержит колонну 1, размещенную на основании 2, и шарнирно установленный на колонне 1 основной двуплечий рычаг 3 с устройством его уравновешивания, содержащим ролик и основной упругий элемент 4, связанньй посредством гибкой тяги 5 с уравновешивающим плечом 6 основного двуплечего рычага, При этом параметры манипулятора
связаны между собой зависимостью Р I
р .U . (J, h,
где Е| - расстояние от оси 7 шарнира крепления основного
двуплечего рычага к колонне 1 точки крепления гибкой тяги 5 к уравновешивающему плечу 6 основного двуплечего рычага;
h| - расстояние от оси 7 шарнира крепления основного двуплечего рычага к колонне 1 до оси крепления ролика 3 на колонне 1;
Р( - приведенный вес основного двуплечего рычага. 3 l|- расстояние от оси 7 шарнира крепления основного двуплечего рычага к колонне 1 до точки приложения приведенно го веса основного двуплечего рычага; К, - жесткость основного упругог го элемента 4. Манипулятор снабжен дополнительным двуплечим рычагом 8, шарнирно установленным на конце рабочего плеча основного двуплечего рычага 3, причем основной двуплечий рычаг с уравновешивающим плечом 9 дополни. тельного двуплечего рычага образует с дополнительно введенными звенья ми 10 и 11 первый шарнирный параллелограммный механизм, при этом на дополнительно введенном звене 10 параллелограммного механизма, парал- 20 лельном основному двуплечему рычаГУ, закреплен дополнительный упругий элемент 12. Кроме того, уравновешивающее плечо 6 основного двуплечего рычага вместе с частью 13 колонны 1 и двумя дополнительными соответственно введенными звеньями 14 и 15 образует второй параллелограммный механизм, при этом ось 16 шарнира, соединяющего дополнительно введенные звенья 14 и 15, связана посредством гибких тяг 5 и 17 с основным 4 и дополнительным 12 упругими элементами, а параметры манипулятора связаны между собой зависимостью р U , где Ej - длина уравновешивающего плеч 9 дополнительного двуплечего рычага; г длина дополнительно введенно го звена 15 второго параллел граммного механизма, параллельного колонне 1; г - приведенньй вес дополнительного двуплечего рычага; расстояние от оси 18 шарнира крепления дополнительного двуплечего рьтага к основному двуплечему рычагу до точки приложения приведенного веса дополнительного двуплечего рычага; К,- жесткость дополнительного упругого элемента 12. В точке шарнирного сочленения звеньев 10 и 11 установлен ролик 19 для гибкой тяги 17. При этом в первом и
упругие элементы могут быть выполнены в виде цилиндрических пружин (фиг. 1 и 3) или пневматических цилиндров, играющих роль аккумуляторов энергии (фиг. 2 и 4). В последнем случае штоковые полости этих цилиндров до начала работы заполняют воздухом с атмосферным давлением. При этом 604 втором шарнирных параллелограммных механизмах противолежащие звенья имеют равные длины, а именно: 6 и звено 14 - длину к. , звено 15 и часть 13 колонны 1 - длину/х плечо 9 и звено 11 - длину П2, а звено 10 - длину, равную сумме длин и I, уравновешивающего 6 и рабочего 8 плеч основного двуплечего рычага. Кроме того, манипулятор может быть снабжен еще одним двуплечим рычагом, шарнирно установленным на конце рабочего плеча дополнительного двуплечего рычага, тогда уравновешивающее 9 и рабочее плечи последнего с дополнительно введенными звеньями должны образовывать третий шарнирный параллелограммный механизм и иметь еще один, соединенньй с ним, упругий элемент (не показаны). Основной 4 и дополнительный 12 параметры упругих элементов 4 и 12 регулируются в соответствии с параметрами двуплечих рычагов и параллелограммных механизмов зависимостями р., .Р . р , ,P2-Lz Ч Г-JT -U- путем изменения жесткости соответствующей пружины или путем изменения объе- ма штоковой полости соответствующего пневматического цилиндра. Колонна 1 может иметь поворотную часть, а ее основание 2 может быть установлено на транспортном средстве, На конце рабочего плеча укреплен в зависимости от условий эксплуатации манипулятора грузозахватный, зажимный или поддерживающий рабочий орган. Манипулятор имеет приводы, связанные с системой программного управления технологическим участком автоматической линии(не показано)и размещенные в зоне шарнирных сочленений. Манипулятор работает следующим образом. При подаче управляющего воздействия от системы .программного управления манипулятор перемещается к месту работы и там фиксируется. Затем один из приводов через шарнир 7
передает усилие уравновешивающему и рабочему плечам 6 основного двуплечего рычага. Под действием этого усилия происходит перемещение плеч (а в случае необходимости и поворот колонны 1 или ее части), в результате чего рабочее плечо занимает любое промежуточное положение в пределах рабочей зоны для проведения операций с объектом манипулирования При этом вследствие перемещения урановешивающего плеча 6 перемещается и гибкая тяга 5, связанная с ним и упругим элементом 4, осуществляющим уравновещивание рабочего плеча. При движении плеча 6 вверх происходит либо растяжение пружины (фиг. 1), либо сжатие воздуха в штокрвой полости пневматического цилиндра (фиг. 2), а при движении плеча 6 вниз - соответственно сжатие пружины или расширение воздуха в штоковой полости пневматического цилиндра.
Работа манипулятора для вариантов его выполнения, изображенных на фиг. 3 и 4, осуществляется аналогично с той разницей, что соответствующий привод через шарнир 18 передает усилие уравновешивающему и рабочему плечам дополнительного двуплечего рычага. Под действием этого усилия происходит разворот звеньев 10 и 11 первого и звеньев 14 и 15
второго параллелограммных механизмов вокруг соответствующих шарниров. При этом перемещаются гибкие тяги 5 и 17, взаимодействующие соответственно с основным 4 и дополнительным 12 упругими элементами, осуществляющими уравновешивание манипулятора.
7 77777
Фиг. 2
| Рука манипулятора | 1978 |
|
SU715317A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
