| название | год | авторы | номер документа |
|---|---|---|---|
| Сцепное устройство сочлененного транспортного средства | 1988 |
|
SU1525027A1 |
| Подвеска транспортного средства | 1988 |
|
SU1507600A1 |
| Манипулятор | 1983 |
|
SU1183360A1 |
| Автооператор | 1984 |
|
SU1191256A1 |
| Привод захвата манипулятора | 1975 |
|
SU521128A1 |
| Сварочный манипулятор | 1981 |
|
SU984763A1 |
| Автоматическая роторно-конвейерная машина для сборки пильных цепей | 1986 |
|
SU1409403A1 |
| Привод захвата манипулятора | 1978 |
|
SU688328A1 |
| Сервопровод | 1975 |
|
SU611036A1 |
| Манипулятор для монтажно-сборочных работ | 1976 |
|
SU631329A1 |
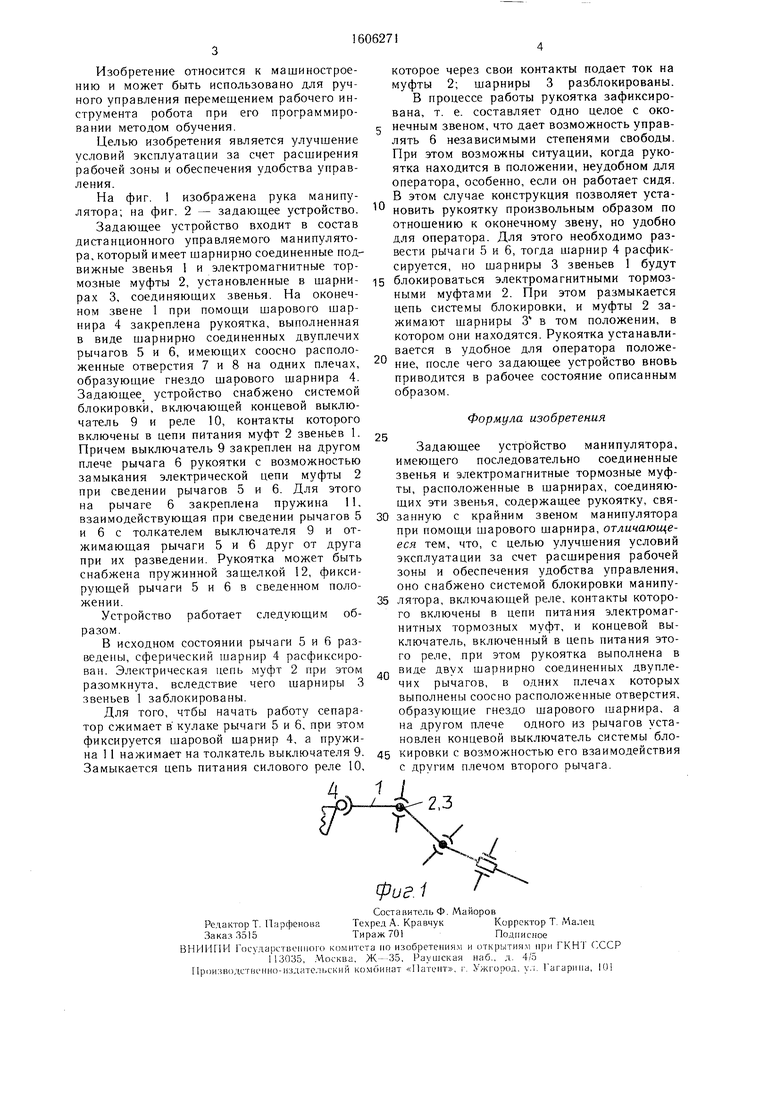
Изобретение относится к машиностроению и может быть использовано для ручного управления перемещением рабочего инструмента робота при его программировании методом обучения. Целью изобретения является улучшение условий эксплуатации за счет расширения рабочей зоны и обеспечения удобства управления. Цель достигается благодаря наличию системы блокировки звеньев манипулятора, включающей концевой выключатель 9 и реле 10, контакты которого включены в цепи питания электромагнитных муфт, установленных в шарнирах звеньев, а также благодаря выполнению рукоятки задающего устройства в виде шарнирно соединенных двуплечих рычагов 5 и 6, соосные отверстия в одних плечах которых служат гнездом шарового шарнира. Это обеспечивает фиксацию любого звена или любого сочетания звеньев в произвольном положении и дает возможность установить рукоятку в удобном для оператора положении и совершать точные малые перемещения рабочего органа. 2 ил.
| Кулешов В | |||
| С | |||
| и др | |||
| Дистанционно управляемые роботы и манипуляторы | |||
| М.: Машиностроение, 1986, с | |||
| Схема обмотки ротора для пуска в ход индукционного двигателя без помощи реостата, с применением принципа противосоединения обмоток при трогании двигателя с места | 1922 |
|
SU122A1 |
