// rOflfS Г
ел го
СП
со
Изобретение относится к измерительной технике и может быть использовано д.чя контроля поперечного размера полости из- дел и я.
Целью изобретения яи.тегся повьппение надежности его работы за счет обеспечения отвода датчика от подвижных элементов устройства.
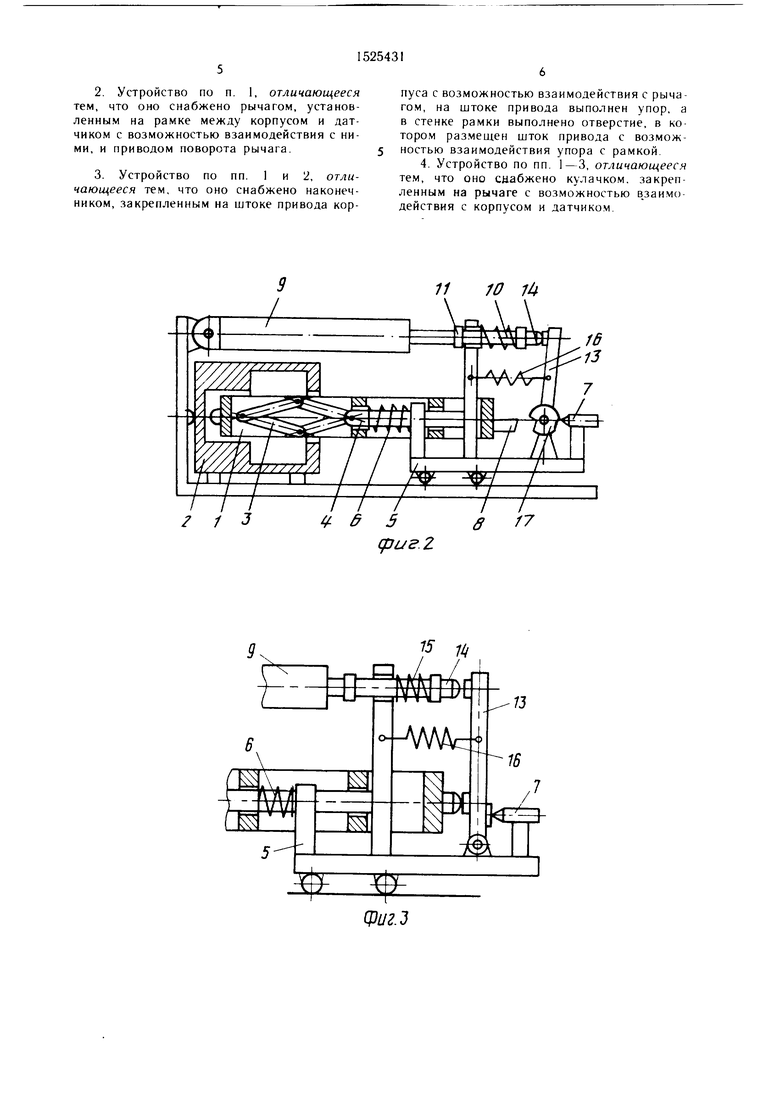
На фиг, 1 изображено устройство с ры чагом и кулачком, рабочее ио.чожение; на фиг. 2то же. промежугочное положение; на фиг. 3устройство с рыча1 ом.
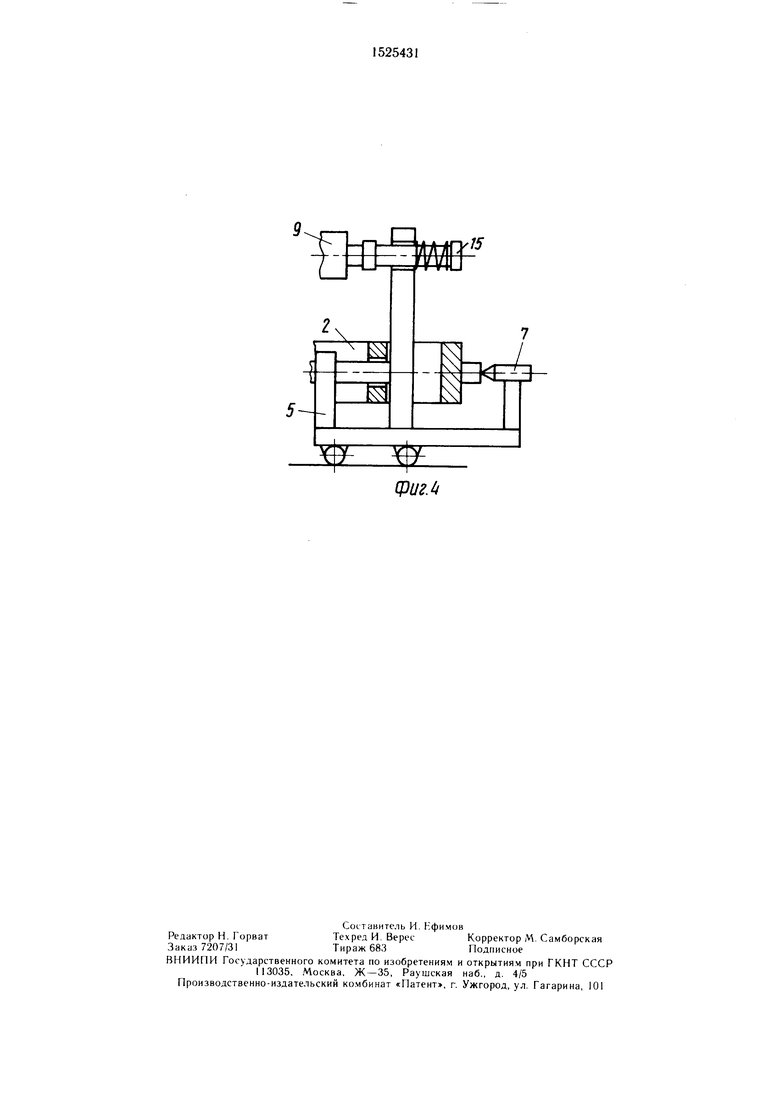
рабочее положение; на фиг. 4 - уст ройство в )аб()чем положении
Устройство содержит корпус 1, установ .к нный в полости контролируемого и; лелия
2,ра:.ме1пенные в проре.зях корпуса 1 тягп
3,соединенные между собой шарнирно н наралле. 1ог)амм. ( те 1жень 4 размещен в корт/се 1 в .пяющих и и.меет возможность осевого персмещепия. Шарнир одной из пар тяг 3 закреп;км1 на корпусе 1, а другой па|)ы ГЯ1 3с одним и;1 цов стержпя 4. Второй копен стержня 4 жестко связан с (шмкой п. на стержне 4 между рамкой .п и корпусом 1 установ.чена пружина () сжатия. На рамке 5 установлен датчик 7. и:1меря1О1Пий величину относительного неремешения рамки 5 и корпуса
1.во;(действ 10П1.СГО lui датчик 7 упоро.м Н Привод :) вьи1о.. |неп. например, в ви. К нчеи моиилиндра со 1пток(;М 10. на ког:)ром за креплен yii.ip П. i; стенке )амки иы fio. iiieno отве)стие 12. и К(1то()ом IHTOK К) с возможносг1 к) взаимодействия упора II с рамкой 5. Привод 9 11ред ;,:з начен дли перемещения корпуса 1 из пехот ного по. южеиня в шбочее и раствижг- ния ТЯ1 . до и.ч соп)икосиовения с конт- )().1ируемой 11ов1-)хностьк и: делия 2.
Для снижешы динамических нагрузок. во;1никак):цих при введении Я1 3 в и;5делие
2.между датчиком 7 и корпусом I с возможностью взаимодействия с ними у1танов- ,1ен на рамке 5 на оси . ычаг 13. обес- печивак)П1ИЙ замыкание кинематической ценидатчик 7. рычаг 13, упор 8 Рычаг 13 поворачивается приводом. В качестве привода может быть использован либо отдельный пневмонилиндр. .Н1бо нневмоци- .тиндр иривота 9.
На 1итоке привода 9 установлен наконечник 14. взаимодействуюпигй с рычагом 13. а между гаконечником 14 и кроннгтейном рамки 5 установлена пружина 15. уд .р- живак)Н1ая устройство в рабочем ноложении при свободном ходе нгтока 10 привода 9 относителыи; рамки 5. рычаг ;м 13 и кронгнтейном рамки 5 установлена пру жина 16 расгяження.
Для контроля по группам «Годно. «Брак на рычаге 13 .закреп.чей кулачок 17. спрофилированный таким образом, что на его рабочей поверхности обра зова пы иыстуиьг.
5
0
5
0
5
0
5
0
5
имеющие возможность взаимодействовать с упором 8, и впадины, имеющие возможность взаимодействовать с датчиком 7. В зависимости от наличия или отсутствия ;ia3opa между выступом кулачка 17 и упором 8 кулачок 17 с рычагом 13 поворачиваются на дискретную величину, соответствующую группе разбраковки изделий 2.
Устройство работает следующим образом.
Изделие 2 устанавливают на позицию контроля и корпус 1 вводят в его полость. В промежуточном положении стержень 4 с ра.мкой 5 и датчиком 7 смещены относительно корпуса 1 в крайнее положение, тяги 3 параллелограмма сведены к центру. При упоре корпуса I в изделие 2 пружина 6 сжимается, а стержень 4. рамка 5 и датчик 7 пере.мещаются на величину, зависяш.ук)от поперечного р;:змера контролируемой полости, т. е. до упора раздви- тяг 3 в стенки коь;полируемой по- ло(.ти. Датчик 7 п()и р..1зведении тяг 3 сГ),. 1и жаегся с уиирсм 8 и производит и;(.мерение разме; а. соответствующее поперечному размеру полости и.у1е. 2.
Блаю.чаря установке датчика 7 на рамке 5 при выведении корпуса 1 и;; изделия 2 по (жончании контроля упор 8 удаляется or датчика 7 и тем самым исключаются уд;)ы по датчич, 7 при сжатии тяг 3 д() ра шера входа - полост:, изделия 2.
Нри выполнении устройства с рычаго.м 13 пос.те установки в рабочее положение 10 привода 9 продолжает переме- :па1ьсн, сжимая пружину 15 до тех пор, ноь, н.1М)нечник 14 не разомкнется с рыча- IOM 13 и последний не вступит во вза- имодейсгвие с упором 8.
Нри контроле с номощью кулачка 17 одновременно с поворотом рычага 13 поворачивается кулачок 17. В зависимости от размера по.чгк ти изделия 2 и соответствующею ему положения унора 8 происходит или сцепление с ним выступа кулачка 17. или свободный поворот кулачка 17 в крайнее положение. Соответственно датчик 7 вступает во взаимодействие с теми или иными впадинами кулачка 17, обеспечив подачу дискретного сигнала.
Формула изобретения
1. Устройство для контроля поперечно- го размера полости изделия, содержащее , размеп|енные в нем тяги, образующие шарнирный тараллелограмм, стержень, с оединенный одним концом гпарнирно с од- н(JЙ из вершин параллелограмма, привод корпуса со LHTOKOM и датчик перемещения стержни, отличающееся тем, что, с целью по- В1 и1ения надежности, оно снабжено рамкой, соединенной с вторым концом стержня, и приводом ее перемещения вдоль оси стержня, а датчик установлен на рамке с возможностью взаи.модействия с корпусом.
2.Устройство по п. 1, отличающееся тем, что оно снабжено рычагом, установленным на рамке между корпусом и датчиком с возможностью взаимодействия с ними, и приводом поворота рычага.
3.Устройство по пп. 1 и 2, отли- нающееся тем, что оно снабжено наконечником, закрепленным на штоке привода корпуса с возможностью взаимодействия с рычагом, на штоке привода выполнен упор, а в стенке рамки выполнено отверстие, в котором размещен шток привода с возможностью взаимодействия упора с рамкой.
4. Устройство по пп. 1-3, отличающееся тем, что оно снабжено кулачком, закрепленным на рычаге с возможностью в заимо- действия с корпусом и датчиком.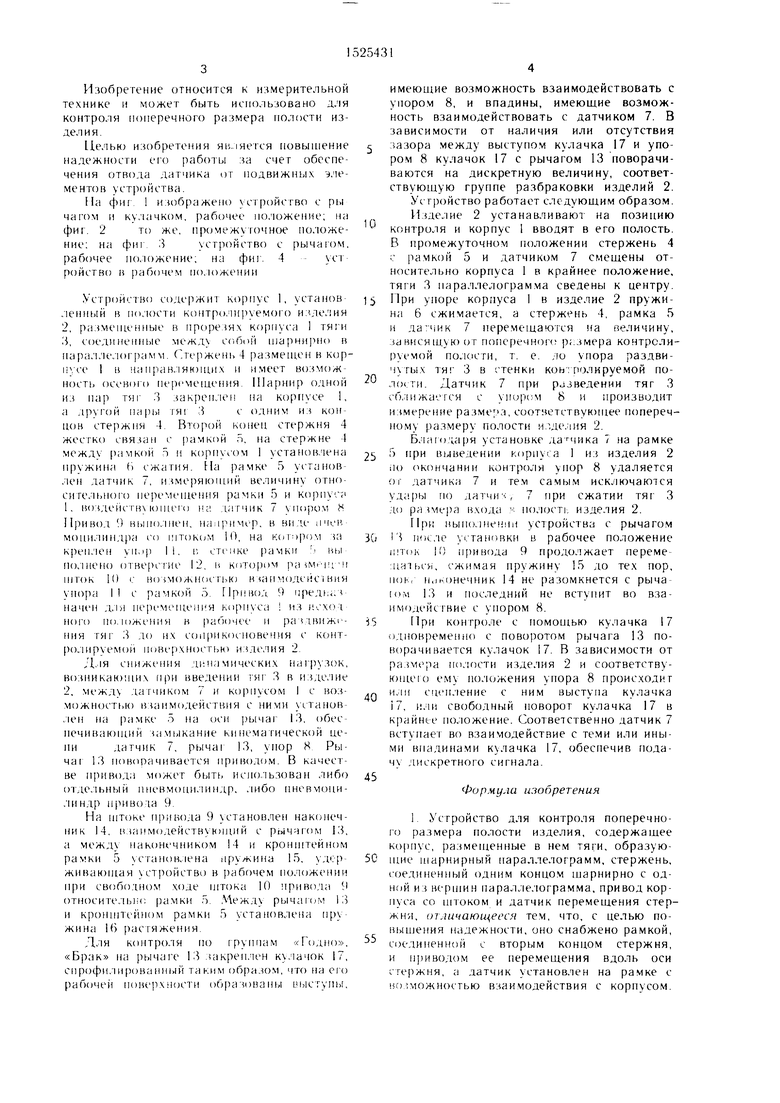
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разгрузки подвесок грузонесущего конвейера | 1983 |
|
SU1162702A1 |
| СТОПОР БЛОКА ОРУЖИЯ | 2013 |
|
RU2541600C1 |
| Линия для изготовления железобетонных изделий | 1983 |
|
SU1105591A1 |
| Устройство для сортировки штучных изделий по массе | 1982 |
|
SU1222335A1 |
| Машина для сборки изоляторов | 1986 |
|
SU1403107A1 |
| Станок для сборки узлов деталей типа вал-втулка | 1976 |
|
SU580080A1 |
| ДВИЖИТЕЛЬНО-РУЛЕВОЙ КОМПЛЕКС | 1996 |
|
RU2107642C1 |
| Линия для сборки узлов | 1985 |
|
SU1399049A1 |
| Ленточно-шлифовальный станок | 1978 |
|
SU751591A2 |
| Комплекс для технического обслуживания автомобилей | 1986 |
|
SU1346468A1 |
Изобретение относится к области измерительной техники. Целью изобретения является повышение надежности за счет обеспечения возможности отвода датчика от подвижных элементов устройства. Устройство содержит корпус 1, размещенные в нем тяги 3, соединенные между собой шарнирно в параллелограмм, стержень 4, соединенный с парой тяг 3 и с рамкой 5, датчик 7, установленный на рамке 5, и рычаг 13, установленный на рамке 5. При упоре корпуса 1 в контролируемое изделие 2 шток 4, рамка 5 и датчик 7 перемещаются на величину, зависящую от поперечного размера полости, т.е. до упора раздвинутых тяг 3 в стенки полости. Датчик 7 при разведении тяг 3 сближается с упором 8 и осуществляет измерение. 3 з.п. ф-лы, 3 ил.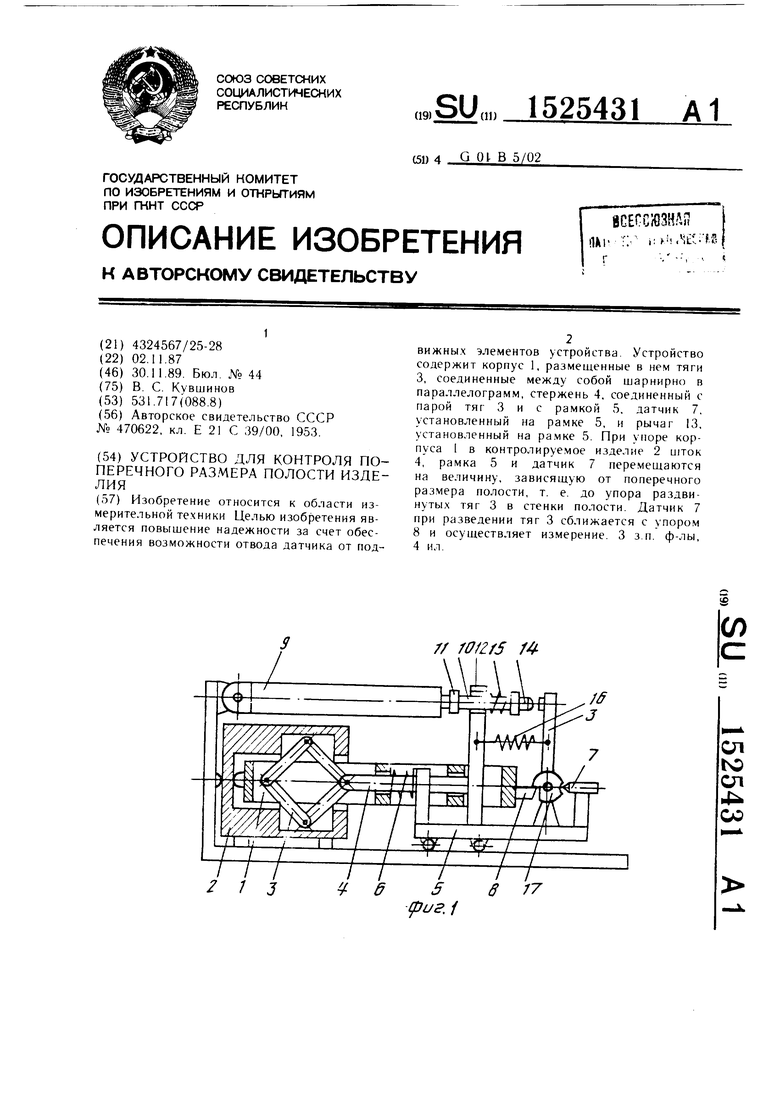
fff lU
сриг.2
15 7
-Л Ас:Ф//гЛ
(Риг.
| Устройство для измерения напряжений горных пород в скважинах | 1972 |
|
SU470622A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
