292 2525
)аяА СП
1чЭ
СД j
сд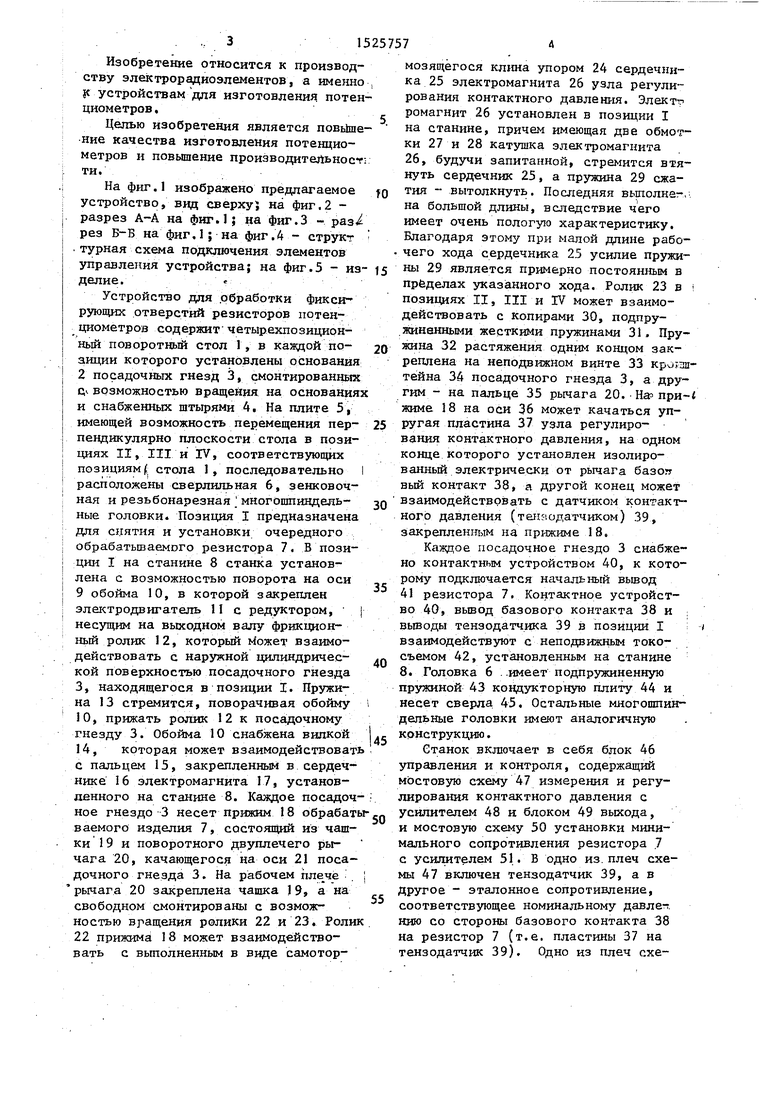
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для абразивоструйной обработки деталей | 1979 |
|
SU891407A1 |
| Станок для насекания напильников и механизм ориентирования обрабатываемой поверхности заготовки относительно инструмента | 1981 |
|
SU1021064A1 |
| ПОЛУАВТОМАТ ДЛЯ ПОДГОТОВКИ МЕСТА КЛЕЙМЕНИЯ НА | 1973 |
|
SU384515A1 |
| Устройство для изготовления изделий из термопластичных материалов гибкой | 1988 |
|
SU1669747A1 |
| УСТРОЙСТВО ДЛЯ ПОЗИЦИОНИРОВАНИЯ ИЗДЕЛИЕМ В ПРОЦЕССЕ СВАРКИ | 1990 |
|
SU1743112A1 |
| Устройство для контроля и сортировки уплотнительных колец | 1986 |
|
SU1359008A1 |
| Автомат для установки упругих колец в наружные канавки базовых деталей | 1980 |
|
SU904972A1 |
| Устройство для закрепления деталей | 1985 |
|
SU1263493A1 |
| УНИВЕРСАЛЬНЫЙ НАПОЛЬНЫЙ БЫТОВОЙ ДЕРЕВООБРАБАТЫВАЮЩИЙ СТАНОК | 1992 |
|
RU2030989C1 |
| Приспособление к фрезерному станку для автоматического прорезания шлицев в петушках коллектора | 1953 |
|
SU99608A1 |
Изобретение относится к производству электрорадиоэлементов, а именно к устройствам для изготовления потенциометров. Цель изобретения - повышение качества изготовления потенциометров и повышение производительности в работе-достигается тем, что устройство для обработки фиксирующих отверстий резисторов 7 потенциометров содержащее размещенную на станине 8 многошпиндельную головку 1 (сверлильную, зенковочную и резьбонарезную), прижимы 18, выполненные в виде подпружиненных двуплечих рычагов 20, и поворотный стол 1 с посадочными гнездами 3. Имеется также узел регулирования контактного давления, выполненный в виде упора 24 и упругой пластины 37 с датчиком 39 контактного давления, шарнирно закрепленной на рычаге 20. Причем на рабочем конце упругой пластины 37 закреплен базовый контакт 38, опирающийся на беговую дорожку резистора 7. Упор 24 выполнен в виде самотормозящегося клина и взаимодействует со свободным плечом рычага 20. 1 илл.
ФУ8. 2
..315
Изобретение относится к производству электрорадиоэлементов, а именно j устройствам для изготовления потенциометров ,
Целью изобретения является повьЬпе- ние качества изготовления потенциометров и повышение производитеЛьност; ти.
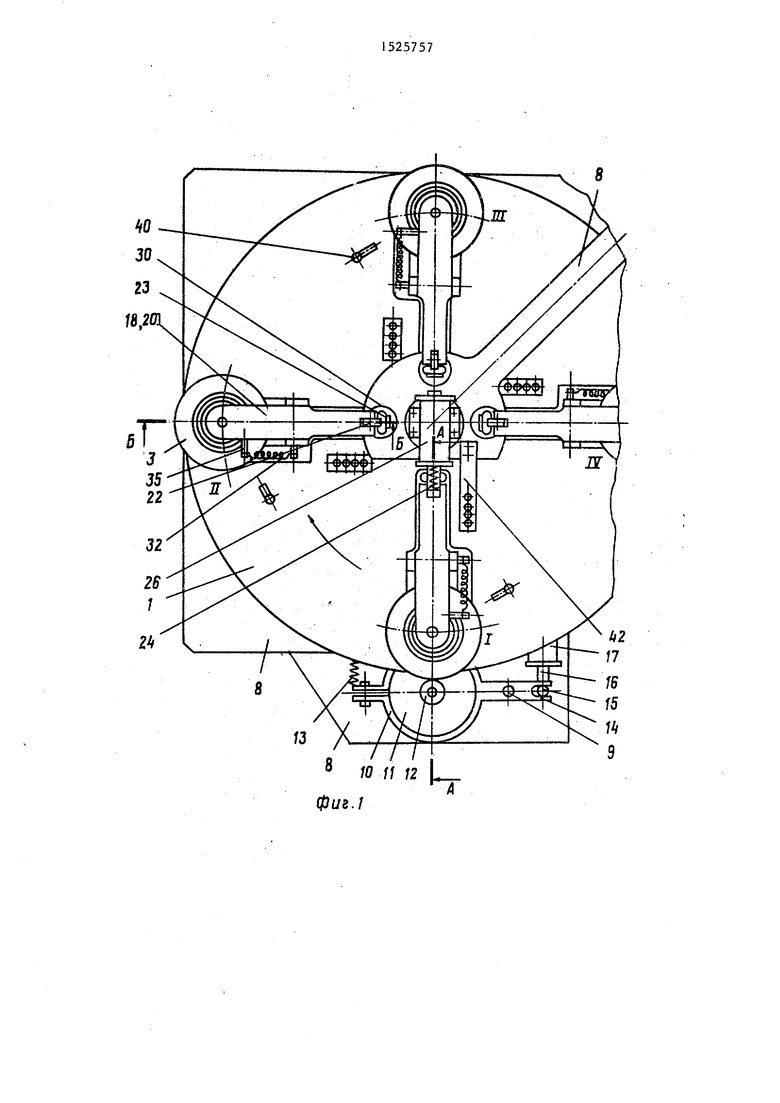
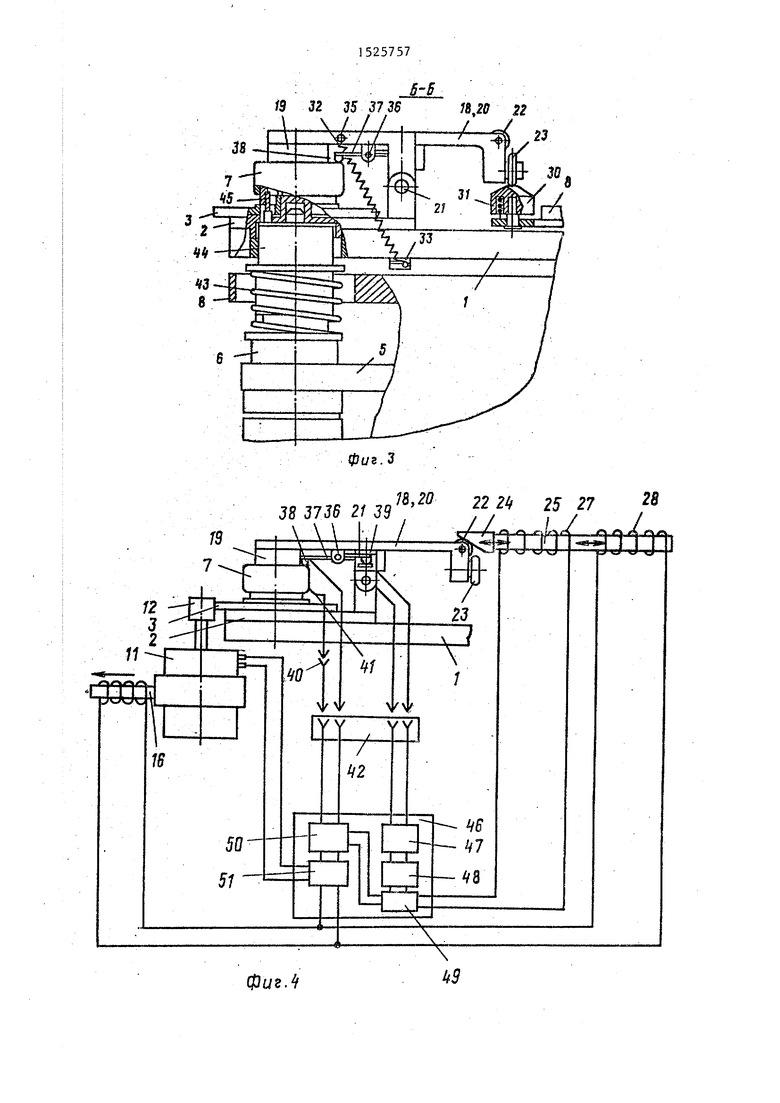
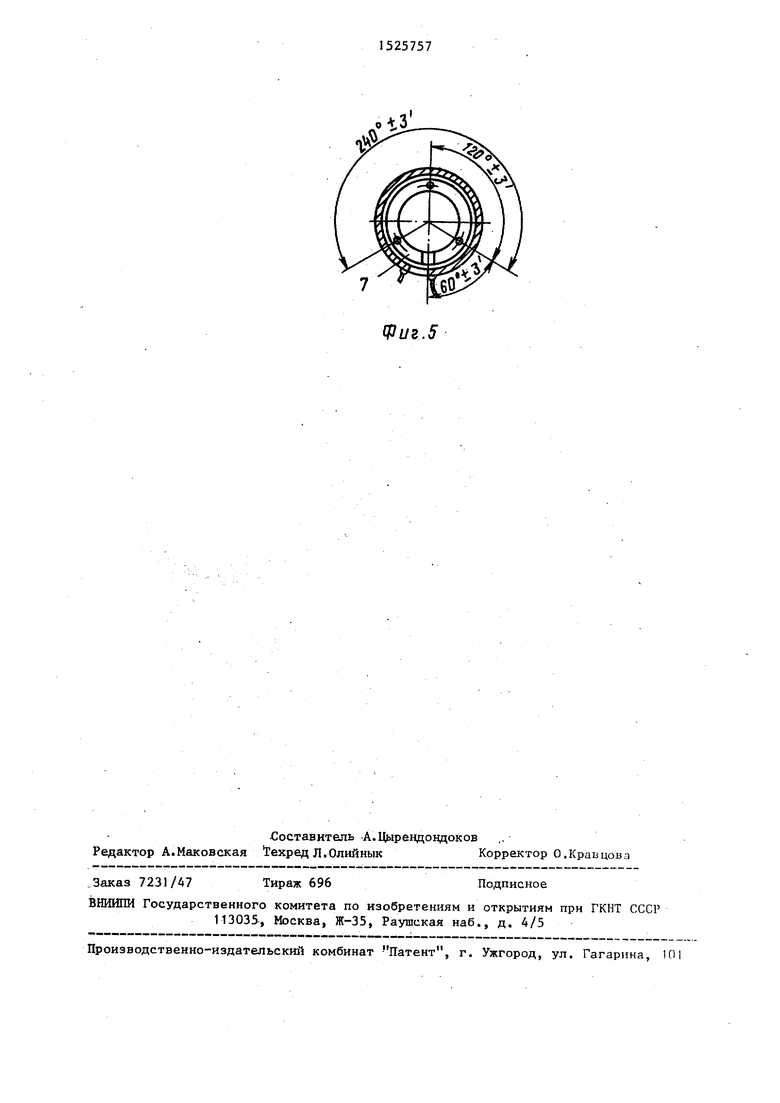
На фиг.1 изображено предлагаемое устройство, вид сверху; на фиг.2 - разрез А-А на фиг.1; на фиг.З - раз/ рез Б-Б на фиг.1; на фиг.4 - структ
. турная схема подключения элементов управления устройства; на фиг.5 - из- делие.
Устройство для обработки фикси рующих отверстий резисторов потенциометров содержит четырехпозицион- ный поворотный стол 1, в кагодой позиции которого установлены основания 2 посадочных гнезд 3, смонтированных Дч возможностью вращения на основаниях и снабженных штырями 4, На плите 5, имеющей возможность перемещения перпендикулярно плоскости стола в позициях II, III и IV, соответствующих позициям стола 1, последовательно I расположены сверлильная 6, зенковоч- ная и резьбонарезная многошпиндель- ные головки. Позиция I предназначена для снятия и установки очередного обрабатьшаемого резистора 7. В позиции I на станине 8 станка установлена с возможностью поворота на оси 9 обойма 10, в которой закреплен электродвигатель И с редуктором, | несущим на выходном валу фрикционный ролик 12, который гложет взаимодействовать с наружной цилиндрической поверхностью посадочного гнезда 3, находящегося в позиции I. Пружина 13 стремится, поворачивая обойму 10, прижать ролик 12 к поса дочному гнезду 3. Обойма 10 снабжена вилкой 14, которая может взаимодействовать с пальцем 15, закрепленным в сердечнике 16 электромагнита 17, установленного на станине 8. Каядчое посадоч- ное гнездо 3 несет прижим 18 oбpaбaть ваемого изделия 7, состоящий из чашки 1 9 и поворотного двуплечего рычага 20, качающегося на оси 21 посадочного гнезда 3, На рабочем .
рычага 20 закреплена чашка }9, а на свободном смонтированы с возможностью вращения ролики 22 и 23, Ролик 22 прижима 18 может взаимодействовать с вьтолненным в виде самотор
O
0
5
s
Q
0
5
0
45
5
мозящегося клина упором 24 сердечника 25 электромагнита 26 узла регулирования контактного давления. Элект-т ромагнит 26 установлен в позиции I на станине, причем имеющая две обмотки 27 и 28 KaTjraiKa электромагнита 26, будучи запитанной, стремится втянуть сердечник 25, а пружина 29 сжатия вытолкнуть. Последняя вьшолне-, на большой длины, вследствие чего имеет очень пологую характеристику. Благодаря этому при малой длине рабочего хода сердечника 25 усилие пружины 29 является примерно постоянным в пределах указанного хода. Ролик 23 в позициях II, III и IV может взаимодействовать с копирами 30, подпру- ясинанными жесткими пружинами 31. Пружина 32 растяжения одним концом закреплена на неподвижном винте 33 кро;за- тейна Зй посадочного гнезда 3, а другим - на пальце 35 рычага 20. На при- жиме 18 на оси 36 может качаться упругая пластина 37 узла регулирования контактного давления, на одном конце которого установлен изолированный электрически от рычага базоя вый контакт 38 а другой конец может взаимодействовать с датчиком контактного давления (тенводатчиком) 39, з акрепленным на прижиме 18.
Каждое посадочное гнездо 3 снабжено контактным устройством 40, к которому подключается начальный вьшод 41 резистора 7. Контактное устройство 40, вывод базового контакта 38 и ; выводы тензодатчика 39 в позиции I взаимодействуют с неподвижным токосъемом 42, установленным на станине 8. Головка 6 . .имеет подпружиненную пружиной 43 кондукторную плиту 44 и несет сверла. 45. Остальные многопшин- депьные головки имеют аналогичную конструкцию.
GTaHOK включает в себя блок 46 управления и контроля, содержащий MbcTOBjno схему 47 измерения и регулирования контактного давления с усилителем 48 и блоком 49 выхода, и мостовую схему 50 установки минимального сопротивления резистора 7 с усилителем 51. В одно из. плеч схемы 47 включен тензодатчик 39, а в другое - эталонное сопротивление, соответствующее номинальному давлет. кию со стороны базового контакта 38 на резистор 7 (т.е. пластины 37 на тензодатчик 39). Одно из плеч схемы 50 .образует сопротивление резистора 7 между вьшодом 41 и базовым контактом 38, а в другое включено сопротивление, эквивалентное минимальному значению сопротивления межд вьшодом 41 и беговой контактной дорожкой резистора 7.
Устройство для обработки фиксирующих отверстий резисторов потенцио-. метров работает следующим образом.
В исходном положении посадочного гнезда 3, находящегося в загрузочной позиции I стола 1, прижим 18 откинут в вертикальное положение (показано штрихпунктиром на фиг.2), палец 35 находится справа от оси 21 , пружина 32 также расположена справа от оси 21 и Наклонена вправо, удерживая прижим 18 в откинутом состоянии, при этом обмотки электромагнитов 26 и 17 обесточены и сердечник 25 полностью выдвинут из магнита 26 пружиной 29, а ролик 12 прижат к посадочному месту 3. В этот момент, контактное устрой-25 32 благодаря самотормозящейся форме ство 40, вьгоод базового конта;кта 38 клина упора 24. В момент уравнове- и выводы тензодатчика 39, расноложен- ные на данном посадочном месте 3, контактируют с токосъемом 42, обеспёчи-;
30
вающим их коммутацию с блоком 46. В указанном положении оператор вручную устанавливает резистор 7 на посадочное гнездо 3, совместив его паз со штырем 4 с грубьм ориентированием по углу, после чего поворачивает прижим 18 по направлению стрелки С, пе- . реводя его в горизонтальное положение до касания роликом 22 упора 24, При этом пружина 32 сначала растягивается, проходя мимо оси 21, а затем сжимается, снова фиксируя прижю 18 в горизонтальном положении. В момент касания роликом 22 вьцдвийутого упора 24 чашка 19. введена внутрь резистора 7, но не касается своим торцом его основания и не закрепляет резистор 7. В этот же момент пластина 37 благодаря своей упругости одновременно касается тензодатчика 39, а базовым контактом 38 - беговой дорожки резистора 7. После опускания прижима 18 оператор подключает на- . чальный вьшод 41 резистора 7 к контактному устройству 40.
Благодаря тому, что сердечник 25 с упором 24 вьщвинут в крайнее положение, давление контакта 38 на резистор 7 в этот момент во всех случаях меньше номинального, а следователь35
40
шивания схемы 47 через блок 49 вклю чается Мостовая схема 50. Сигнал раз баланса схемы 50, пропорциональный разности сопротивления между выводом 41 и контактом 38, с одной cTopoiai, и заданной величиной минимального сопротивления резистора 7, с другой усиливается усилителем 51 и поступает на двигатель 11 , который пр Фодит ся во вращение и поворачивает доса-, дочное гнездо 3, а через штырь 4 - и резистор 7 при установленном номинальном контактном давлении До тех пор, пока базовый контакт 38 не вьш- дет на точку минимального сопротивления резистора 7 и схема 50 не сбалансируется. Если процессе этого . поворота по какой-либо причине давдс ление контакта 38 на беговую дорожку резистора 7 отклонится от номи- нальной величины, это отклонение по ле преобразования в схеме 47 поступит на обмотку 27 в виде добавочного
50 напряжения (положительного или отрицательного) и произойдет коррекция положения сердечника 25 с упором 24 а рычаг 20 получит поворот в ту ivm иную сторону до восстановления поминального контактного давления, .
После того, как схема 50 уравновесится, т.е. будет достигнуто требуемое угловое расположение .резисто- ,ра 7 на столе 1, одновременно подае
55
но, меньше номинального и давление на теизодатчик 39. Соприкосновение контакта 38 и резистора 7 через электросхему станка дает команду на включение мостовой схемы 47 блока 46. Напряжение разбаланса ; этой схемы, пропор.даональное отличию фшстичес- ког о контактного давления от номинального, усиленное в усилителе 48, суммируется с постоянной величиной напряжения, пропорциональной усилию пружины 29 в пределах рабочего хода сердечника 25, и поступает на обмотку 27 катушки электромагнита 26.В результате сердечнж 25 втягивается внутрь катушки магнита 26 до тех пор, пока фактическое давле)ие на резистор 7 и тензодатчик 39 не сттшт
равным номинальному и схема 47 не
сбалансируется. Достигнутое в результате автоматического поиска положение сердечника 25 с упором 24 не может быть искажено усилием пружины
32 благодаря самотормозящейся форме клина упора 24. В момент уравнове-
шивания схемы 47 через блок 49 включается Мостовая схема 50. Сигнал разбаланса схемы 50, пропорциональный разности сопротивления между выводом 41 и контактом 38, с одной cTopoiai, и заданной величиной минимального сопротивления резистора 7, с другой, усиливается усилителем 51 и поступа, ет на двигатель 11 , который пр Фодит- ся во вращение и поворачивает доса-, дочное гнездо 3, а через штырь 4 - и резистор 7 при установленном номинальном контактном давлении До тех пор, пока базовый контакт 38 не вьш- дет на точку минимального сопротивления резистора 7 и схема 50 не сбалансируется. Если процессе этого поворота по какой-либо причине давление контакта 38 на беговую дорожку резистора 7 отклонится от номи- нальной величины, это отклонение пос.: ле преобразования в схеме 47 поступит на обмотку 27 в виде добавочного
напряжения (положительного или отрицательного) и произойдет коррекция положения сердечника 25 с упором 24, а рычаг 20 получит поворот в ту ivm иную сторону до восстановления поминального контактного давления, .
После того, как схема 50 уравновесится, т.е. будет достигнуто требуемое угловое расположение .резисто- ,ра 7 на столе 1, одновременно подает
ся напржкение на вторую обмотку 28 катушки электромагнита 26 и катушку электромагнита 17, причем электродвигатель 11 обесточивается. В ре- зультате в момент балансирования схеьс) 50-посадочное гнездо 3 с резистором 7 прекращает поворот, сердечник 25 с упором 24 полностью втягивается внутрь магнита 26 против пружи1Щ 29, позволяя пружине 32 через; рычаг 20 и чашку 19 закрепить посадочное место 3 с резистором 7 на столе , При этом электромагнит 17 поворачивает обойму 10 на оси 9 про- тив пружины 13, отводя ролик 12 от посадочного места 3.
После окончания описанных операций устройство управления дает коман ду на поворот стола 1 на 90 по ча- совой стрелке,и загруженное посадочное гнездо 3 из позиции I перемещается в позицию II. В конце этого поворота ролик 23 прижима 18 наезжает на копир 30, сжимая его пружи- ну 31. Усилие последней окончательно закрепляет обрабатьшаемое изделие 7 на столе 1, подготовив его к оработке. Вслед за этим получает перемещение вверх плита 5, и сверла 45 головки 6 сверлят фиксирующие отверстия в резисторе 7 в позиции II через кондукторную плиту. 44, останавливающуюся в конце хода плиты 5 при сжиг-1ающейся пружине 43. Одновремен- но в позициях III и IV аналогичным образом осуществляются соответственно зенкование и резьбонарезаиие указанных отверстий.
После каждого поворота стола 1 на 90 в загрузочно-разгрузочную позицию I возвращается очередной обраг ботанный резистор 7. В конце каждого поворота обесточиваются обмотки электромагнитов 17 и 26, в результа- те чего ролик 12 прижимается к очередному посадочному гнезду 3 под действием пружины 13, а пружина 29 полг ностью выдвигает сердечник 25 с упором 24. Одновременно в конце поворо- та, стола 1 с токосъемом 42 сочленяются очередное контактное устройство 40, вьшод базового контакта 37 и выводы тензодатчика 39.
После поворота оператор поднимает приж11М 18 посадочного места 3, переместившегося в позицию I, в вертикальное положение, поворачивая пружину 32 на винте 33, отсоединяет на- чальньй вьшод 41 обработанного резистора 7 от контактного устройства 40 и снимает разист(рр, заканчивая цикл
Формула изобретения
-циометров, содержащее размещенные на станине многошпиндельную головку, прижим и стол с посадочньм гнездом и базовым контактом, о тличаю- щ е е с я тем, что, с целью повышения качества изготовления потенциометров и повышения производительности., оно снабжено узлом .регулирования контактного давления и дополнительными посадочными гнездами, прижимак.и и базовыми контактами, причем основные и дополнительные посадочные гнезда, прижимы и базовые контакты равномерно установлены по периметру стола, размещенного на станине с возможностью поворота, а каждый прижим.вьшолпен в виде подпружине шого друплечегр рычага, свободное плечо которого размещено с возможностью взаимодейств1-1я с узлом регулирования контактного давления , причем ось поворота рычага размещена внутри угла качания его прзгжины, а многошпиндельная головка размещена с возможностью перемещения в направлении, перпендикулярном плоскости стола..
в виде упругой пластины с датчиком контактного давления, шарнирно закрепленной на каждом двуплечем рычаге прижима, и упора, вьшолнениого в форме самотормозящего клина и размещенного на станине с возможностью взаимодействия со свободньм плечом рычага прижима, причем базовые контакты закреплены на рабочих концах упругих пластин.
г
/9 J2 35 373S III
38 3736 21 39
Фи.
фиг. 3
B,20 22 2Ц 25 27
28
k9
доставитель А.Цырендондоков Редактор А.Маковская Техред Л.ОлийныкКорректор о,Кравцова
Заказ 7231/47
Тираж 696
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 10i
Фиг.5
Подписное
| Ансеров М.А | |||
| Приспособления для металлореяопцих станков | |||
| М.: Машиностроение, I960, с.321 | |||
| Вертикально-сверлильный станок с многошпиндельной головкой | 1979 |
|
SU931380A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
