ел
Од
сх
4 Од
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для захвата листового груза | 1988 |
|
SU1623941A1 |
| Линия для раздачи корма рыбам в рыбоводных водоемах | 1981 |
|
SU1050620A1 |
| Устройство для продвижения бревен по воде | 1987 |
|
SU1474060A1 |
| Траверса для транспортировки иуКлАдКи лиСТОВыХ издЕлий | 1977 |
|
SU821380A1 |
| Устройство для подачи материала в рабочую зону пресса | 1987 |
|
SU1488075A1 |
| Агрегат для сортировки листовых деталей | 1983 |
|
SU1192867A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Устройство для перемещения листовых изделий | 1983 |
|
SU1134491A1 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
| Устройство для отделения листов от стопы и подачи их к обрабатывающей машине | 1981 |
|
SU1007793A1 |

Изобретение относится к контрольно-сортировочной технике и может быть использовано для сортировки листовых деталей на судостроительных предприятиях. Целью изобретения является повышение производительности и надежности работы. Над приемным столом 15 установлены рама 1 и траверса 3 с приводом 2 вертикального перемещения. На траверсе закреплены направляющие 5, на которых смонтированы с возможностью поперечного перемещения каретки с автономными приводами. Каждый захват установлен на соотв.каретке с помощью гибких нитей 10. По команде от средства программного управления каждая каретка с захватом 11 занимает определенное положение. Траверса 3 опускается, захваты 11 захватывают листовые детали и переносят их в отводящую зону. На концах направляющих 5 установлены поворотные упоры с конечными выключателями, которые отключают приводы кареток. 5 ил.
16
-t
15
Изобретение относится к контрольно-сортировочной технике в машиностроении и может быть использовано преимущественно для сортировки листо- вых деталей, на судостроительньпс предприятиях.
Цель изобретения - повышение производительности и надежности работы.
На фиг.1 изображено устройство, обсшй вид; на Аиг.2 - разрез А-А на фиг,1; на фиг.З - разрез Б-Е на фиг .2; на фиг.А - разрез В-В на фиг. 2 на фиг.З - кинематическая схема каретки с грузозахватом.
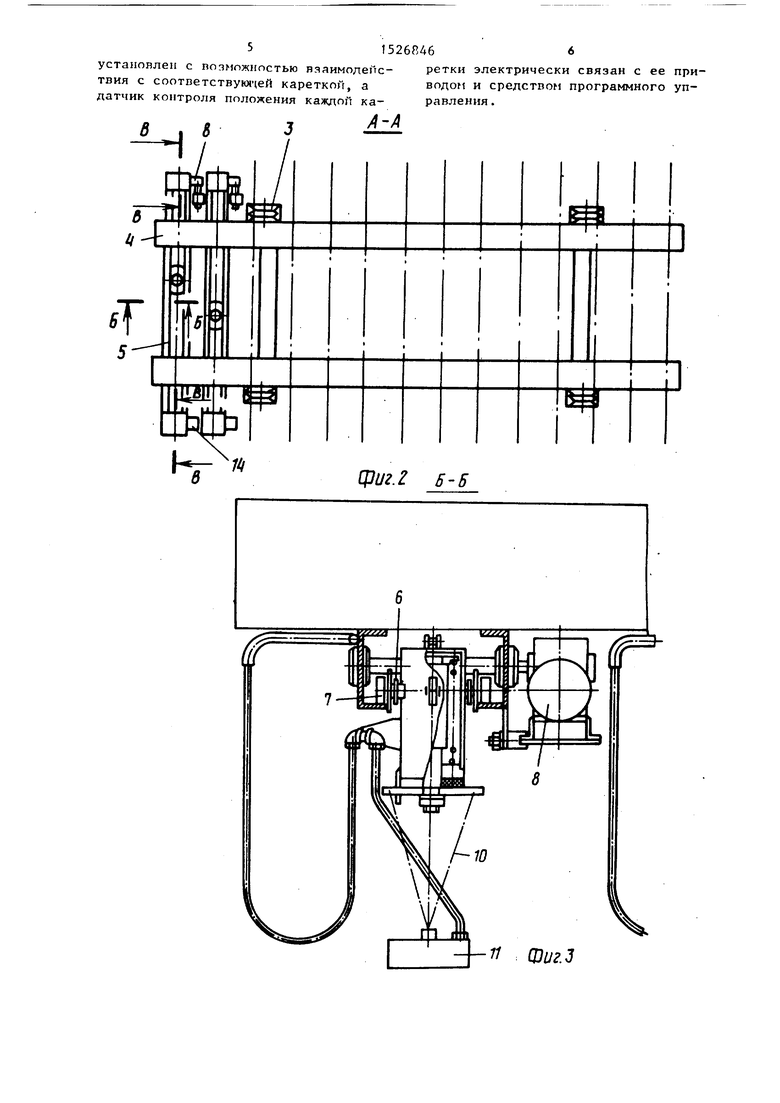
Устройство содержит раму 1, на которой установлен привод 2 подъема траверсы 3, вьтолненной в виде про- доль}1ых балок 4 и закрепленных на них поперечных направляющих 5.
На поперечных направляющих 5 смонтированы каретки 6 на роликах 7, приводы 8 поперечного перемещения и датчики 9 контроля положения (не обозначено) . На каждой каретке 6 смонтирона ны на цепочках 10 захваты 11 (электромагнитные или магнитовакуумные). На концах каждой направляющей 5 установлены конечные выключатели 12 конца хода кареток 6. Рабочий орган ко- нечных выключателей 12 взаимодействует с одним плечом двуплечих подпружиненных рычагов 13, второе плечо которых является жестким упором для кареток 6. Конструкция упора обеспе- чипает выкатывание кареток 6 при поднятом вверх рычаге 13. Датчики 14 контроля положения кареток 6 электрически связаны средством программного управления, обеспечивающим дистанди- онное программное управление передвижения каждого захвата 11 по направляющим 5 и работой всего устройства.
Устройство работает следующим образом.
В исходном положении устройство находится нал приемным столом 15, на котором находится разрезанный лист 16, конечные выключатели 12, соответствующие исходному положению ка- реток 6, нажаты. Траверса 3 приводом 2 подъема поднята в крайнее верхнее положение, захваты 11 с датчиками наличия листа свободно висят на цепочках 10.
По сигналам, поданным от средств программного управления, каретки 6 с захватами 11 перемещаются по поперечным направляющим 5 в место их ра
5 0
5
Q
5
боты, определяемое программой в зависимости от формы и расположения детали. При этом датчики 14 вьфабатывают сигналы для отсчета расстояния, которое нужно пройти захватам 11. По достижении заданного программой положения каретки 6 останавливаются. Траверса 3 опускается вниз, захваты 11 ложатся на листовые детали 16. После ослабления всех цепочек 10, что позволяет захватам 11, самоустанавливаясь, плотно прилечь к верхней плоскости листовых деталей, привод 2 подъема отключается и траверса 3 останавливается. Затем по команде все захваты 11, находящиеся на листовых деталях 16, включаются в режим Взятие , переключаются на режим Транспортировка, траверса 3 поднимается в крайнее верхнее положение и перегружатель переносит детали 16 в требуемую зону. Затем цикл повторяется. При приближении каретки 6 к исходному положению двуплечий рычаг 13, касаясь каретки 6, поворачивается, взаимодействуя с конечным выключателем 12, который отключает привод R перемещения кареток.
При перемещении кареток 6 в направлении, противоположном исходному, нажимается анапогичньй1 конечный выключатель 12 и вновь отключается привод 8.
Формула изобретения
Устройство для сортировки листовых деталей, содержащее приемный стол, размещенную над ним раму, смонтированные на раме грузозахватную траверсу с самоустанавливающимися захватами, привод вертикального перемещения траверсы и средство программного управления, отличающееся тем, что, с целью повышения производительности и надежности в работе, траверса выполнена в виде продольных балок, закрепленных на них поперечных направляющих по числу захватов, смонтированной на каждой направляющей каретки с приводом и датчиком контроля положения, а также установленных на концах каждой направляющей упоров для кареток и взаимодействующих с ними конечных выключателей, при этом каждый захват установлен на соответствующей каретке с помощью гибких нитей, калдый двуплечий рычаг
Шиг.З
ЦЗиг.5
1
7/
| Перегружатель-сортировщик листовых деталей | 1984 |
|
SU1202634A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
