JS
Изобретение относится к транспортному машиностроению, в именно к самосвальным платформам.
Цель изобретения - повышение на- дежности.
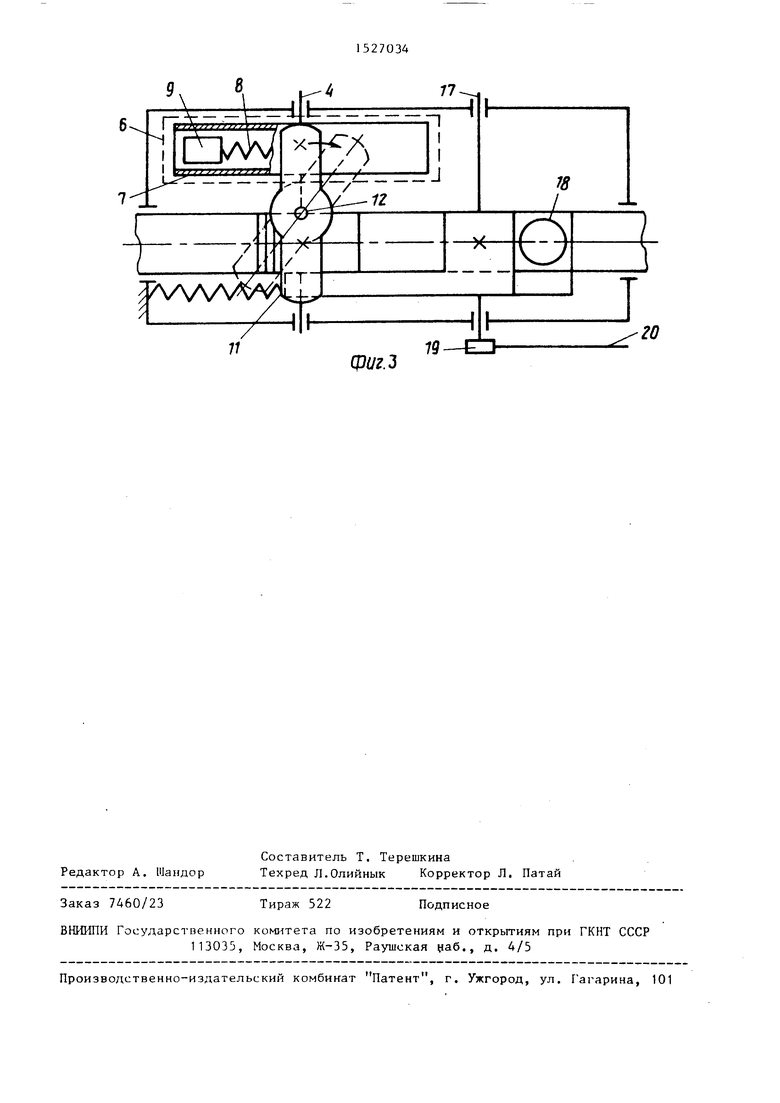
На фиг. 1 изображена обшая схема размещения ловителя на транспортном средстве; на фиг. 2 - кинематическая схема ловителя, вид сбоку; на фиг. 3- то же, вид сверху; на фиг. 4 - ловитель, аксонометрия.
Ловитель содержит корпус 1, который установлен с возможностью перемещения вдоль зубчатор1 рейки 2, смон- тированной на раме транспортного средства и стоке 3, шарнирно связанной с грузовой платформой 9 корпусом 1 ловителя.
В корпусе 1 установлены вал 4, на котором жестко закреплены зубчатое колесо 5, сопряженное с рейкой 2, и центробежный механизм 6, состоящий из маховика 7 с радиальным отверстием, в котором на тарированной пружи- не 8 размещен палец 9, а также спусковой механизм 10.
Спусковой механизм 10 состоит из двуплечего рычага 11, установленного на жестко закрепленной в корпусе 1 оси 12 и подпружиненного относительно корпуса 1. Одно плечо рычага 11 расположено над маховиком 7, а другое установлено с возможностью взаимодействия со штангой 14 эксцентрикового
фиксатора 15. Фиксатор 15 имеет выступ 16, расположенный над зубчатой рейкой 2, закрепленной на валу 17, установленном в корпусе 1, и подпружинен относительно корпуса 1 пружи- ной 18. На валу 17 жестко закреплен рычаг 19 возврата, связанный тросом 20 с расположенным в кабине самосвала рычагом управления (не показан). На конце штанги 14 закреплена упру- гая пластина 21, установленная с возможностью взаимодействия с зубчатым колесом 5.
Ловитель работает следующим образом.
При номинальной скорости опускания грузовой платформы корпус 1 ловителя перемешается по рейке 2, приводя во вращение зубчатое колесо 5 и маховик 7 центробежного механиз- ма 6. При этом палец 9 удерживается в радиальном отверстии маховика 7 пружиной 8, а двуплечий рычаг 11 спускового механизма 10 уравновешен
5
0 5
0
5
Q з
0
пружиной 13 и исключает поворот эксцентрикового фиксатора.
В случае увеличения скорости опускания грузовой платформы, вызванного отказом какого-либо узла гидравлического опрокидьшающего устройства, увеличивается скорость поступательного перемещения корпуса 1 по направляющей рейке 2 и, следовательно, увеличивается скорость вращения зубчатого колеса 5 и маховика 7. Под действием возросшей центробежной силы пружина 8 растягивается, выдвижной упор 9 выходит из отверстия маховика 7 и ударяет по двуплечему рычагу 1 1 спускового механизма 10, поворачивая его вокруг оси 12. При этом рычаг 11 освобождается, под действием силы упругости пружины 18 фиксатор
15поворачивается и своим выступом
16упирается в направляющую рейку 2. Перемещение корпуса 1 ловителя по направляющей 2 прекращается и грузовая платформа, опираясь на стойку 3, фиксируется в этом положении. Одновременно под действием силы упругости пружины 13 двуплечий рычаг возвращается в исходное положение.
Для возврата ловителя в исходное положение при помощи троса 20 поворачивают рычаг 19 возврата против часовой стрелки. В результате этого выступ 16 фиксатора 15 выходит из зацепления с рейкой 2, штанга 14, опускаясь, воздействует упругой пластиной 21 на двуплечий рычаг 11 и, преодолевая силу упругости пружины 13, поворачивает его по часовой стрелке. После занятия штангой 14 исходного положения пружина 13 возвращает двуплечий рычаг 11 в исходное положение. Ловитель вновь готов к работе.
Формула изобретения
1. Ловитель грузоподъемной платформы, преимущественно самосвала, содержащий закрепленную на основании направляющую, установленный с возможностью перемещения вдоль нее корпус, закрепленные в корпусе на валу тело качения и центробежный механизм, состоящий из маховика с размещенным внутри него подпружиненным элементом, и фиксатор положения корпуса, причем тело.и фиксатор установлены с возможностью взаимодействия с направляющей, а подпружиненный элемент центр оЦ иг.г
f f fi- „
ф(/г.З

Изобретение относится к транспортному машиностроению, а более конкретно к самосвальным платформам. Целью изобретения является повышение надежности работы ловителя платформы. Ловитель содержит корпус, установленный с возможностью перемещения вдоль направляющей, выполненной в виде зубчатой рейки 2, и стойку, шарнирно связанную с корпусом и платформой самосвала. В корпусе на валу 4 закреплены зубчатое колесо 5 и центробежный механизм, состоящий из маховика 7 с радиальным отверстием, в котором размещен подпружиненный палец 9. На оси 12 установлен двуплечий рычаг 11, одно из плеч которого подпружинено и взаимодействует со штангой 14, жестко закрепленной на фиксаторе 15 положения корпуса. Фиксатор 15 снабжен выступом 16 для взаимодействия с зубьями рейки 2. Для возврата фиксатора 15 после срабатывания в исходное положение служит рычаг 19 возврата, связанный с кабиной тросом 20. 1 з.п. ф-лы, 4 ил.
Редактор A. Шандор
Составитель Т. Терешкина
Техред Л.Олийнык Корректор Л. Патай
Заказ 7460/23
Тираж 522
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская tia6., д. 4/5
Подписное
| ЗаЯВ!!ТСЛЬ | 0 |
|
SU408892A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| . | |||
