1
(21)4329421/25-08
(22)22.09.87
(46) 15.12.89. Бюл. Лэ 46
(71)Специальное конструкторско-те.хнологи- ческое бюро по изоляторам и арматуре Всесоюзного производственного объединения « Союзэлектросетьизоля ция
(72)И. С. Сотник и Г. В. Степко (53) 62.229.723(088.8)
(56) Патент ГДР № 23(932, кл. В 25 J 5/02, I986.
(54) ТРАНСПОРТНЫЙ РОБОТ (57) Изобретение относится к машиностроению и может быть использовано в конструкциях транспортны.ч роботов. Цель изобретения улучшение динамически.ч .характеристик за счет повышения жесткости. На приводной каретке I установлены два червяч- ны.х редуктора 12, 13, на вы.ходны.х вала.х которых жестко закреплены основная и дополнительная .ме.ханические руки, каждая из которых содержит плечи 17, 18, на свободных концах которых QjapHHpHo установлены пред
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортный робот | 1987 |
|
SU1662836A2 |
| Устройство для перегрузки изделий | 1982 |
|
SU1065316A1 |
| Привод монорельсового транспортного средства | 1989 |
|
SU1745585A1 |
| Автоматическая линия для транспортировки полуфабрикатов | 1973 |
|
SU653186A1 |
| Устройство для перемещения и съема изделий | 1982 |
|
SU1122591A1 |
| Манипулятор | 1972 |
|
SU441141A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Подвесной перегружатель | 1989 |
|
SU1696345A1 |
| Манипулятор | 1990 |
|
SU1754435A1 |
| Устройство для загрузки изделий на подвесной конвейер | 1983 |
|
SU1159849A1 |
Изобретение относится к машиностроению и может быть использовано в конструкциях транспортных роботов. Цель изобретения - улучшение динамических характеристик за счет повышения жесткости. На приводной каретке 1 установлены два червячных редуктора 12, 13, на выходных валах которых жестко закреплены основная и дополнительная механические руки, каждая из которых содержит плечи 17, 18, на свободных концах которых шарнирно установлены предплечья 19, 20. На концах последних установлена траверса 21 с приводными захватами 22. В исходном положении ось траверсы 21 совпадает с осью монорельса 6. Промежуточные корпуса 31 удерживаются на направляющих 32 в среднем положении. Включаются электродвигатели 7, приводящие в движение червячные редукторы 2 с колесами 4 на выходных валах 3, и робот перемещается вдоль монорельса 6 к соответствующей позиции. После остановки производится точная фиксация робота на позиции разгрузки. Для этого включается мотор-редуктор 34, разворачивающий барабан 35, арретирующая головка 37 попадает в конический паз 36 и робот жестко фиксируется в продольном направлении. Затем включается электродвигатель 14, приводящий в движение редукторы 12, 13. Приводные плечи 17 и 18 поворачиваются в разные стороны. Одновременно промежуточные шестерни 25 обеих плеч обкатываются по неподвижно закрепленным зубчатым колесам 26, приводя при этом во вращение шестерни 24, насаженные на шарнирах предплечий 19 и 20, которые принудительно поворачиваются соответственно по часовой и против часовой стрелки, обеспечивая строго параллельное перемещение траверсы 21 в сторону позиции загрузки. При подходе полки с изделиями 38 траверса 21 совершает обратное синхронное с ней перемещение - при горизонтальном конвейере, либо с помощью специального устройства - при вертикальном конвейере. Производится захват изделий 38 захватами 22, вслед за этим подвесная полка конвейера перемещается вниз, а изделия 38 "зависают" на приводных захватах 22 и производится отвод траверсы 21 в исходное положение. 1 ил.
ел
СП ts:)
00
а ел
со
J5
J8
плечья 19, 20. На концах последних установлена траверса 21 с приводными захватами 22. В исходном положении ось траверсы 21 совпадает с осью монорельса 6. Промежуточные корпуса 31 удерживаются на направляющих 32 в среднем положении. Включаются э.чектродвигатели 7, приводящие в движение червячные редукторы 2 с колесами 4 на выходных валах 3, и робот перемещается вдоль монорельса 6 к соответ- ствуюнк й позиции. После остановки производится точная фиксация робота на позиции разгрузки. Для этого включается мотор-редуктор 34, разворачивающий барабан 35, арретирующая головка 37 попадает в конический паз 36 и робот жестко фиксируется в продольном направлении. Затем вклю чается электродвигатель 14, приводящий в движение редукторы 12, 13. Приводные плечи 17 и 18 поворачиваются в разные стороны. ОдноПзобретение относится к машиностроению, и может быть использовано в конструкциях транспортных роботов.
Цель изобретения улучшение дина.ми- ческих характеристик за счет повышения жесткости.
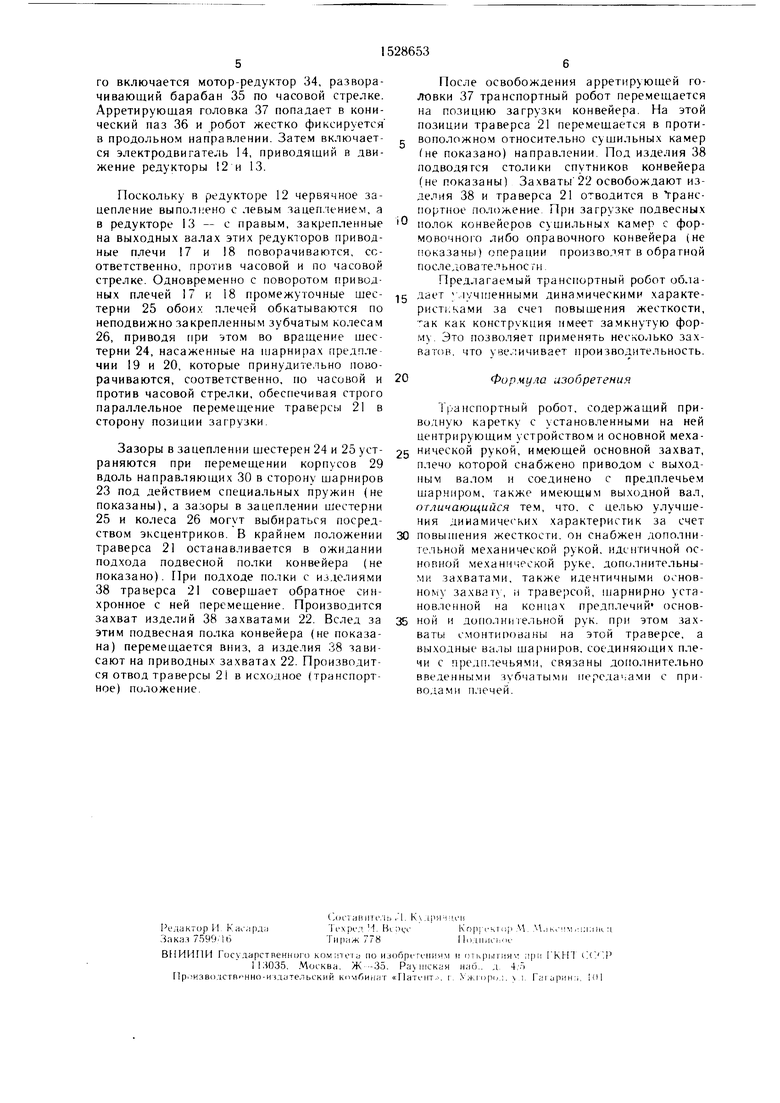
Па чертеже изображена схема транспортного робота.
Транспортный робот содержит сдвоенную Г,-образн ю в вертика,1ьной плоскости приводную каретку I, в верхней части которой закреп,1ен1,| два червячных редуктора 2. Па выходных валах 3 последних установлены- колеса 4 с возможностью взаимодействия с го;1,нолга 1ьпыми направляющими 5 моно- рельси Г), -j., редукторы 2 соединены с электродвигателями 7 муфтами 8. Для повышения устойчивости движения служат ролики 9, установленные на кронштейнах 10 и нижней части каретки 1 с возможностью взаимодействия с вертикальной направляющей 11 этого М(.)11орельса. В нижней части каретки 1 встроены также два червячных |)едуктора 12 и 13 с общим электродвигателем 14 с двумя муфтами 15 и 16. Причем в редукторе 12 червячное зацепление имеет левую нарезку, а в редукторе 13 правую.
Па выходных валах редукторов 12 и 13 жестко закреплены ocf oвнaя и дополнительная механические руки, каждая из которых содержит п, 1ечи 17 и 18, к свободным концам которых шарнирно прикреплены предплечья U и 20. Па концах последних установлена траверса 21 с приводными захватами 22.
Предп.1ечья 19 и 20 жестко соединены с шарнирами 23, на которых установлены шестерни 24 с возможностью взаимодействия посредством промежуточных шестерен 25 с
временно промежуточные шестерни 25 обоих плеч обкатываются по неподвижно закрепленным зубчатым колесам 26, приводя при этом во вращение шестерни 24, насаженные
на щарнирах предплечий 19 и 20, которые принудительно поворачиваются соответственно по часовой и против часовой стрелки, обеспечивая строго параллельное перемещение траверсы 21 в сторону позиции загрузки. При подходе полки с изделиями 38
траверса 21 совершает обратное синхронное с ней перемещение - при горизонтальном конвейере, либо с помощью специального устройства - при вертикальном конвейере. Производится захват изделий 38 захватами
22, вслед за этим подвесная полка конвейе ра Перемещается вниз, а изделия 38 «зависают на приводщ;|х захватах 22 и производится отвод 1раве)сы 21 в исходное положение. 1 ил.
зубчатыми колесами 26, жестко закрепленными на корпусах редукторов 12 и 13 соосно с
5 их выходпыми валами 27. Промежуточные шестерни 25 установлены на эксцентриковых осях 28, закрепленных в корпусах 29, смонтированных на направляющих 30.
Траверса 21 кресжгся к предплечьям 19
.. и 20 посредством промежуточных корпусов 31, установленных на направляющих 32. Оси 33 соединяют промежуточные корпуса 31 с предплечьями 19 и 20. При это.м оси 33 жестко закреплены на последних, а со стороны траверсы 21 имеют сферическую головку,
j- взаимодействующую со сферическими гнездами корпусов 31. Пентрирующее устройство включает закрепленный на выходном валу мотор-редуктора 34 барабан 35 с коническим пазом 36, взаимодействующим с аррети- рующими головками 37, установленными на
0 монорельсе 6 в .местах позиционирования робота.
Транспортных pa6c.ii работает следующим образом.
В исходно.м (транспортном) положении ось траверсы 21 совпадает с осью монорельса 6. Промежуточные корпуса 31 удерживаются на направляющих 32 в среднем положении. Барабан 35 центрирующего устройства развернут против часовой стре, 1ки таким образо.м, что может беспрепятственно
Q проходить над арретирую цими головками 37. Порядок разгрузки определяется программным устройством (не показано). По команде этого устройства включаются электродвигатели 7, приводящие в движение червячные редукторы 2 с колесами 4 на выход5 ных валах 3 и робот перемещается вдоль монорельса 6 к соответствующей позиции. После остановки производится точная фиксация робота на позиции разгрузки. Для этого включается мотор-редуктор 34, разворачивающий барабан 35 по часовой стрелке. Арретирующая головка 37 попадает в конический паз 36 и робот жестко фиксируется в продольном направлении. Затем включается электродвигатель 14, приводящий в движение редукторы 12 и 13.
Поскольку в редукторе 12 червячное зацепление выпoл ;eнo с левым зацеп. 1ением, а в редукторе 13 - с правым, закрепленные на выходны.х валах этих редукторов приводные плечи 17 и 18 поворачиваются, соответственно, против часовой и по часовой стрелке. Одновременно с поворотом приводных плечей 17 и 18 промежуточные шестерни 25 обоих плечей обкатываются по неподвижно закрепленным зубчатым колесам 26, приводя при 5ТОМ во вращение щес- терни 24, насаженные на 1иарнирах предпле чии 19 и 20, которые принудительно поворачиваются, соответственно, по часовой и против часовой стрелки, обеспечивая строго параллельное перемещение траверсы 21 в сторону позиции загрузки.
Зазоры в зацеплении щестерен 24 и 25 устраняются при перемещении корпусов 29 вдоль направляющих 30 в сторону щарниров 23 под действием специальных пружин (не показаны), а зазоры в зацеплении шестерни 25 и колеса 26 могут выбираться посредством эксцентриков. В крайнем положении траверса 21 останавливается в ожидании подхода подвесной полки конвейера (не показано). При подходе полки с изделиями 38 траверса 21 совершает обратное синхронное с ней перемещение. Производится захват изделий 38 захватами 22. Вслед за этим подвесная полка конвейера (не показана) переменяется вниз, а изделия 38 зависают на приводных захватах 22. Производится отвод траверсы 21 в исходное (транспортное) положение.
5
0
5
0
5
После освобождения арретирующей головки 37 транспортный робот пере.мещается на позицию загрузки конвейера. На этой позиции траверса 21 перемещается в противоположном относительно сушильных камер (не показано) направлении. Под изделия 38 подводятся столики спутников конвейера (не показаны) Захваты 22 освобождают изделия 38 и траверса 21 отводится в транспортное положение. При загрузке подвесных полок конвейеров сушильных камер с формовочного либо оправочного конвейера (не оказаны) операции производят в обратной последовательности.
Предлагаемый транспортный робот обладает улуч1аенными динамическими характе- рист1:ками за счет повышения жесткости, ак как конструкция имеет замкнутую форму. Это позволяет применять несколько захватов, что увеличивает производительность.
Формула изобретения
Транспортный робот, содержащий приводную каретку с установленными на ней центрирующим устройством и основной механической рукой, имеющей основной захват, плечо которой снабжено приводом с выходным валом и соединено с предплечьем шарниром, также имеющн.м выходной вал, отличающийся тем, что. с целью улучще- ния динамических характеристик за счет повышения жесткости, он снабжен дополнительной механической рукой, идентичной основной механической руке, дополнительными захватами, также идентичными основному захвату, и траверсой, шарнирно установленной на концах предплечий основной и дополнительной рук. при этом захваты смонтированы на этой траверсе, а выходные валы шарниров, соединяющих плечи с предплечьями, связаны дополнительно введенными зубчатыми передачами с приводами плечей.
