(Л
сд
ю сх
Изобретение относится к подъемно- транспортной технике, в частности к грузозахватным устройствам.
Цель изобретения - повышение на- с ежности работы.
На фиг. 1 изображено грузозахватное устройство, исходное положение; на фиг. 2 - разрез А-А на фиг.1; на фиг, 3 - захватная пластина и Г-об- ; to разный подхватный рычаг, исходное положение; на 4иг. 4 - то же, положение после захвата груза.
Грузозахватное устройство содержит сновную траверсу 1 с петлей 2 для J5 подвешивания к подъемной машине, дополнительную траверсу 3, соединяющий траверсы 1 и 3 ползун 4 и вертикальную направляющую 5, захватные пластины 6 с упругим покрытием 7, П-образ- 20 ные связанные друг с другом рамы 8 для установки на груз 9, шарнирные рычаги 10, вертикальные направляющие 11, уголковые подхватные рычаги 12, которые закреплены на захватных плас- 25 тинах 6 посредством горизонтальных осей 13 и кинематически связаны с вертикальными полками рам 8 дополнительными тягами 14, 15. Свободные концы шарнирных рычагов 10 соединены план- JQ ками 16,которые посредством гибких тяг 17 иосновных гибких элементов 18 соединены с основной траверсой 1 .Захватные пластины 6 посредством дополнительных тяг 19 и дополнительных гибких элементов 20 соединены с дополнительной траверсой З.В полости ползуна 4 расположен стержень 21, на нижнем конце которого шарнир но расположен рычаг 22 с горизонта - ной гюперечиной 23, установленной с возможностью взаимодействия с планками 24 и 25, симметрично закрепленными на противоположных стенках вертикальной направляющей 5. Планки 24 и 25 содержат, верхнюю направляющую 26, выемку 27 и нижнюю направляющую 28.
Грузозахватное устройство работает следующим образом.
В начале работы грузозахватное уст35
45
ройство посредством пе тли 2 навеши- (
вают на подъемную машину и в исходном положении опускают на пакет груза 9 - асбоцементных листов, расположенный, например на полу склада без поддона. Во время опускания устройства верти- кальные направляющие 11 в случае соп-. рикосновения с пакетом скользят по его боковым поверхностям отогнутыми концами и ориентируют передвижение
Q
5
5
0
5
захватных пластин 6, исключая касание пластинами 6 груза 9. При опускании устройства на груз 9 гибкие тяги 17 и основные гибкие элементы 18 находятся в ненатянутом состоянии, а до полнительные тяги 19 и дополнительные гибкие элементы 20 натянуты. После того, как уголковые подхватные рычаги
12касаются поверхности пола, передвижение вниз П-образных рам 8 вместе с захватными пластинам 6 прекращается, а траверсы 1 и 3 продолжают движение вниз. После того, как дополнительная траверса 3 касается поверхности рам 8, основная траверса 1 продолжает вместе с ползуном 4 двигаться вниз, отчего поперечина 23 начинает скользить по направляющим 28, поворачивает рычаг 22 и выходит из выемки 27. После выхода поперечины 23 из выемок 27 основную траверсу 1 поднимают вверх, отчего натягиваются гибкие тяги 17 и гибкие элементы 18, которые тянут вверх планки 16, отчего на шарнирах, закрепленных в П-образных рамах 8, поворачиваются шарнирные рычаги 10. От поворота шарнирных рычагов 10 захватные пластины 6 приближаются к грузу 9 и посредством упругого покрытия 7, например резинового, прижимаются к грузу - пакету 9, исключая разрушение асбоцементных лис- (гов. При приближении захватных плас- гин 6 к грузу 9 от перемещения П-образных рам 8 относительно захватных пластин 6 через тяги 14 и 15 на осях
13поворачиваются Г-образные подхватные рычаги 12 и заходят под нижний асбоцементный лист в пакете. После зажима груза 9 его перемещают в заданное место. Во время перемещения груза 9 П-образные подхватные рычаги 12 удерживают нижние листы груза от выпадания и тем самым от разрушения.
При опускании груза 9 в заданное место после того, как он опускается на поверхность земли, П-образные рамы 8 продолжают от своей массы двигаться вниз, отчего шарнирные рычаги 10 поворачиваются на осях и захватные пластины 6 отходят от груза 9, занимая вместе с Г-образными подхватными рычагами 12 нерабочее положение. После прекращения движения П-образных рам 8 вниз основную траверсу 1 продолжают опускать. При опускании основной траверсы 1 вниз гибкие тяги 17 постепенно освобождаются от натяфие.2
Фиг.З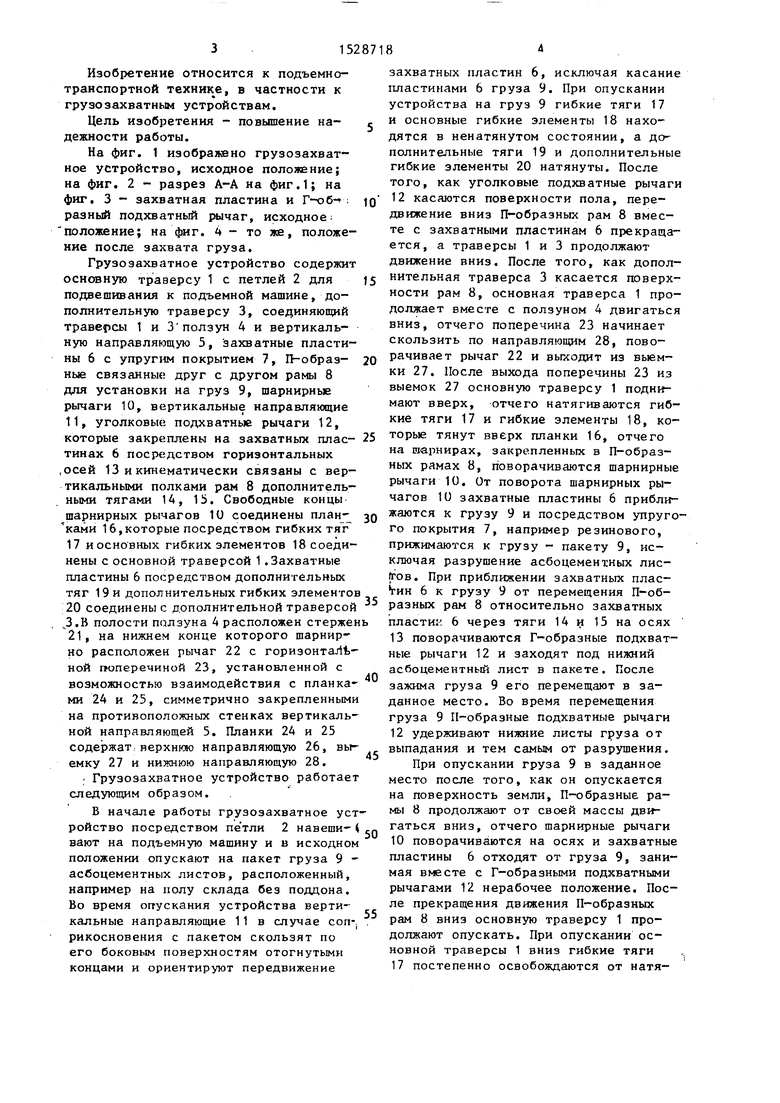

| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Грузозахватная система | 1989 |
|
SU1768491A1 |
| Грузозахватное устройство | 1987 |
|
SU1477649A1 |
| Автоматический захват | 1971 |
|
SU537020A1 |
| Грузозахватное устройство | 1990 |
|
SU1773255A3 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Захватное устройство | 1983 |
|
SU1181977A1 |
| Грузозахватное устройство | 1987 |
|
SU1507713A1 |
| Крановое грузозахватное устройстводля длиННОМЕРНыХ гРузОВ | 1979 |
|
SU796152A1 |
| Грузозахватное устройство | 1989 |
|
SU1622275A1 |
Изобретение относится к подъемно-транспортному оборудованию, в частности к грузозахватным устройствам. Целью изобретения является повышение надежности работы. Грузозахватное устройство содержит П-образные рамы 8, захватные пластины 6, связанные с рамами 8 шарнирными рычагами 10, основную и дополнительную траверсы 1 и 3, связанные с шарнирными рычагами 10 основными гибкими тягами 17 и основными гибкими элементами 18 и с захватными пластинами 6 дополнительными тягами 19 и дополнительными гибкими элементами 20, и уголковые подхватные рычаги 12, захватывающие груз снизу. 4 ил.
| Грузозахватное устройство | 1980 |
|
SU948833A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
