Изобретение относится к подъемно- транспортному оборудованию, в частности к грузозахватным устройствам,
Целью изобретения является уменьшение металлоемкости.
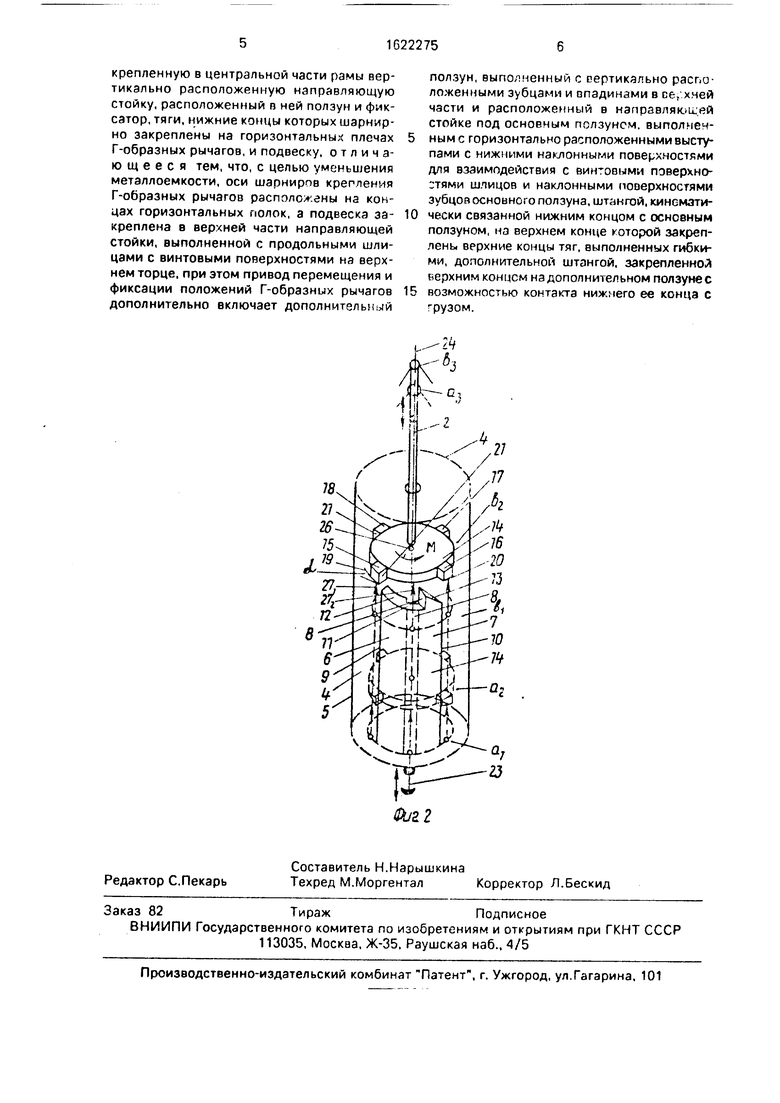
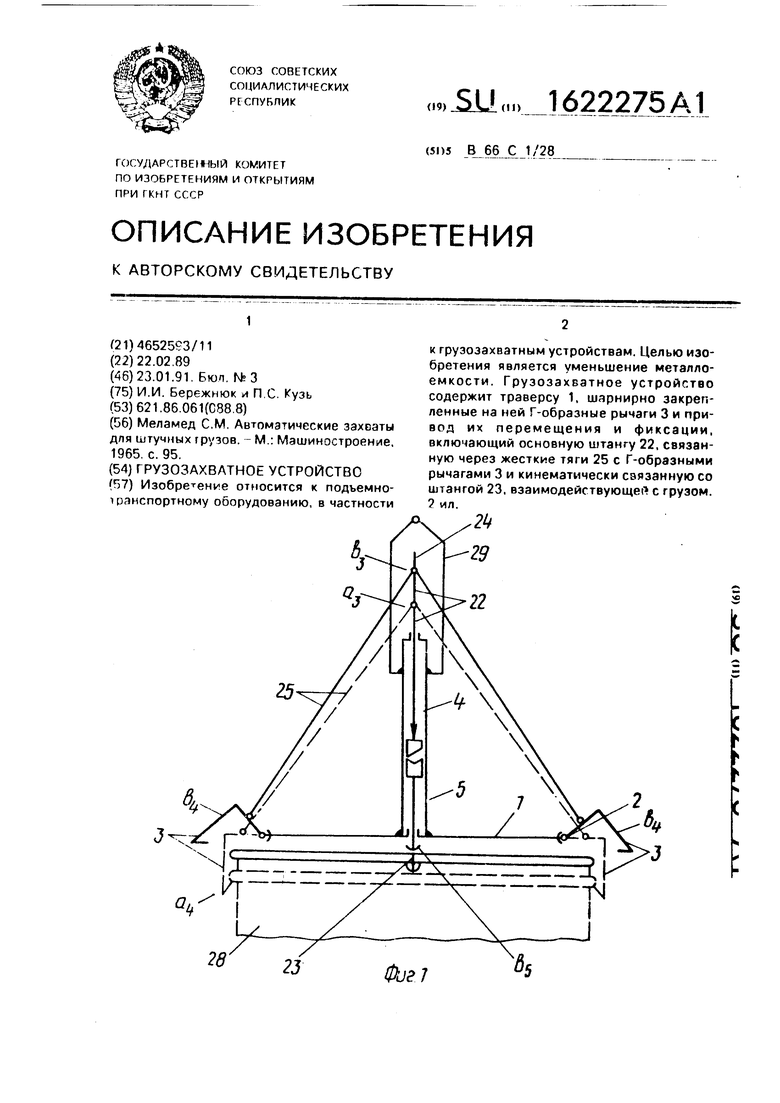
На фиг. 1 изображено грузозахватное устройство, общий вид; на фиг. 2 - привод перемещения и фиксации положений Г-об- разных рычагов грузозахватного устройства.
Грузозахватное устройство содержит расположенную в горизонтальной плоскости траверсу 1, свободно закрепленные на осях 2 Г-обраэные рычаги 3, привод 4 их перемещения и фиксации.
Привод 4 перемещения и фиксации включает направляющую стойку 5, выполненную с расположенными симметрично двумя парами шлицов 6 и 7, ползун 8. Шлицы 6 и 7 ограничены боковыми рабочими поверхностями 9-11. Верхние торцы шлицов 7 выполнены винтовыми поверхностями 12 и 13, чем образован вырез в виде храповика. Ползун 14 выполнен в виде диска с симметрично равномерно расположенными в горизонтальной плоскости четырьмя выступами 15-18, которые имеют торцовые рабочие наклонные поверхности 19 и 20 и боковые 21. Устройство также содержит основную штангу 22, кинематически связанную с основным ползуном 14, и дополнительную штангу 23, связанную с ползуном 8.
Направляющая стойка жестко установлена на траверсе 1 на перпендикулярной ей оси 24 симметрии.
Ползун 14 с одной стороны связан с Г-образными рычагами 3 посредством штанги 22 и гибких тяг 25, а с другой сторо- ны-с дополнительной штангой 23, причем основная штанга 22 установлена на ползуне 14 при помощи вращающей развязки 26, например шарика, а дополнительная штанга 23 выполнена с возможностью контактирования с одной стороны с ползуном 14 при помощи зубцов 27.1 и 27.2 ползуна 8, а с другой - с грузом 28.
Устройство присоединяется к подъемной машине корпусом 5 посредством подвески 29.
Грузозахватное устройство работает следующим образом.
При помощи подъемной машины устройство опускается на груз 28, например на бочку. При этом при контактировании штанги 23 с поверхностью бочки под собственным весом устройства штанга 23, двигаясь вверх, своими зубцами 27 контактирует с наклонными рабочими поверхностями 19 и 70 выступов 15-18 ползуна 14 и подымает
его вверх. При этом в результате противодействия собственного веса ползуна 14 и штанги 22 натяжки гибких тяг 25 под действием Г-образных рычагов 3 и благодаря наклонным поверхностям 19 и 20 создается крутящий момент в противоположном направлении угла наклона а , однако за счет зацепления выступа 15 со шлицом 6 ползун 14 совершает только поступательное движение, т.е. за счет контактирования поверхностей 9 и 21. Штанга 22 выводит ползун 14 из зацепления со шлицом 6, после чего ползун 14 совершает вращательное движение; контактируя поверхностью 19 выступа 15 с поверхностью 12 до захода выступа 15 в зубчатый вырез, образованный поверхностями 11 и 12, где после опускания штанги 23, т.е. после поднятия устройства, происходит фиксация ползуна 14, который в свою
очередь поднимает штангу 22, и одновременно посредством гибких тяг 25 Г-образ- ные рычаги 3 переводятся в раскрытое положение, чем обеспечивается освобождение бочки от устройства. Вращающая развязка 26 предотвращает вращение штанги
22от действия крутящего момента М, что могло бы привести к запутыванию гибких связей 25.
При следующем нажатии штанги 23 на
бочку аналогичным образом зубец 27.2 штанги 23 выводит из зацепления с зубчатым нарезом выступ 15, который после опускания штанги 23, контактируя своей поверхностью 19 с поверхностью 13 после
удаления зубцов 27.2 от поверхностей 19 выступа 15, снова создает крутящий момент М. При дальнейшем вращении ползуна 14 следующий его выступ 18 своей поверхностью 21 упирается в поверхность 9 шлица 6
и вращение ползуна 14 прекращается. Устройство опущено на бочку. При поднятии подъемной машиной устройства штанга 23 опускается вниз по шлицу 7 и в результате контактирования поверхностей 19 и 20 выступов 15 и 18, например, с зубцами 27 и под действием силы тяжести ползуна 14, штанги 22, 23, а также Г-образных рычагов 3 штанга
23и ползун 14 переходят в нижнее положение, а штанга 22 и Г-образные рычаги 3 - в
рабочее положение.
Таким образом обеспечивается захват бочки.
Формула изобретения Грузозахватное устройство, содержащее траверсу с опорным элементом для груза в нижней части, шарнирно закрепленные на ней Г-образные рычаги с зажимными губками, привод их перемещения и фиксации положений, включающий в себя жестко закрепленную в центральной части рамы вертикально расположенную направляющую стойку, расположенный в ней ползун и фиксатор, тяги, нижние концы которых шарнир- но закреплены на горизонтальных плечах Г-образных рычагов, и подвеску, отличающееся тем, что, с целью уменьшения металлоемкости, оси шарниров крепления Г-образных рычагов расположены на концах горизонтальных полок, а подвеска закреплена в верхней части направляющей стойки, выполненной с продольными шлицами с винтовыми поверхностями на верхнем торце, при этом привод перемещения и фиксации положений Г-образных рычагов дополнительно включает дополнительный
5
ползун, выполненный с вертикально расположенными зубцами и впадинами в ое, хней части и расположенный в направляющей стойке под основным ползуном, выполненным с горизонтально расположенными выступами с нижними наклонными поверхностями для взаимодействия с винтовыми поверхностями шлицов и наклонными поверхностями зубцов основного ползуна, штангой, кинематически связанной нижним концом с основным ползуном, на верхнем конце которой закреплены верхние концы тяг, выполненных гибкими, дополнительной штангой, закрепленной верхним концом на дополнительном ползуне с возможностью контакта нижнего ее конца с рузом.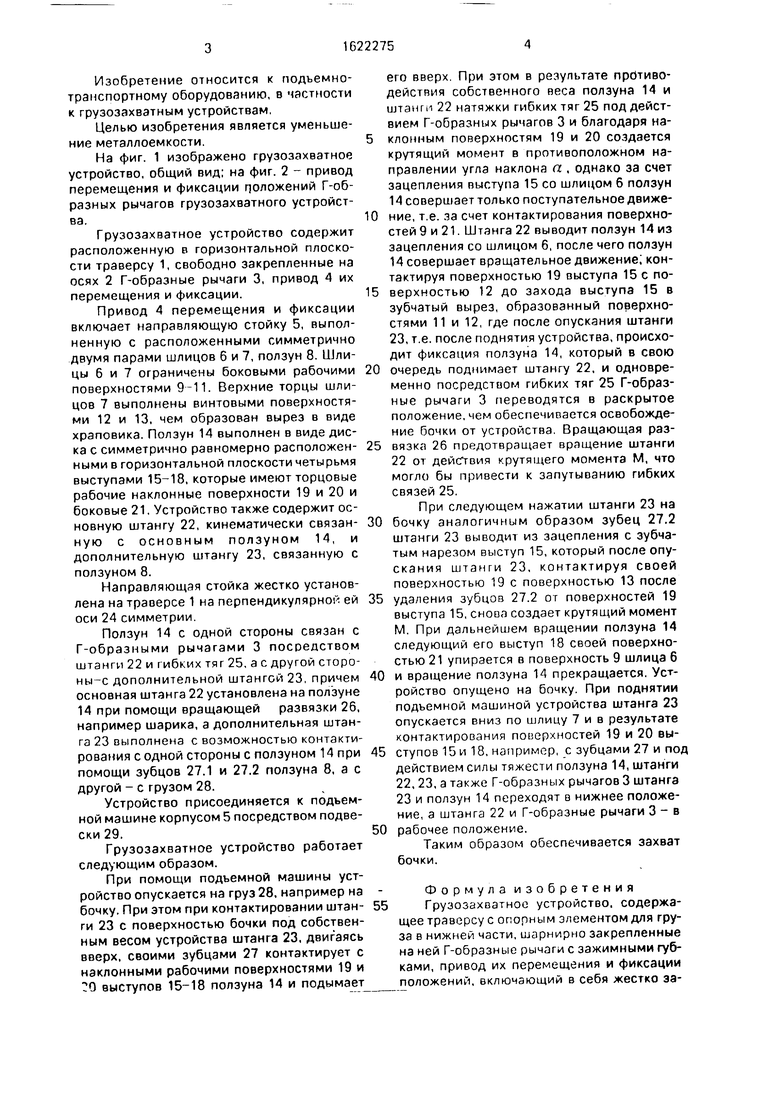
| название | год | авторы | номер документа |
|---|---|---|---|
| Делительная машина для вязких масс | 1987 |
|
SU1440454A1 |
| Захватное устройство для изделий с конусной вертикальной полостью | 1990 |
|
SU1740303A1 |
| Грузозахватное устройство | 1986 |
|
SU1399251A1 |
| Механизм фиксации положения рычагов грузозахватного устройства | 1986 |
|
SU1381056A1 |
| Грузозахватное устройство для монтажа строительных конструкций | 1974 |
|
SU557034A1 |
| Грузозахватное устройство | 1988 |
|
SU1652277A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Делительная машина для вязких масс | 1987 |
|
SU1442162A1 |
| Грузозахватное устройство | 1989 |
|
SU1678747A1 |
| Центробежный просеиватель | 1987 |
|
SU1456250A1 |
| Меламед С.М | |||
| Автоматические захваты для штучных грузов | |||
| - М.: Машиностроение, 1965, с | |||
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
