i
(Л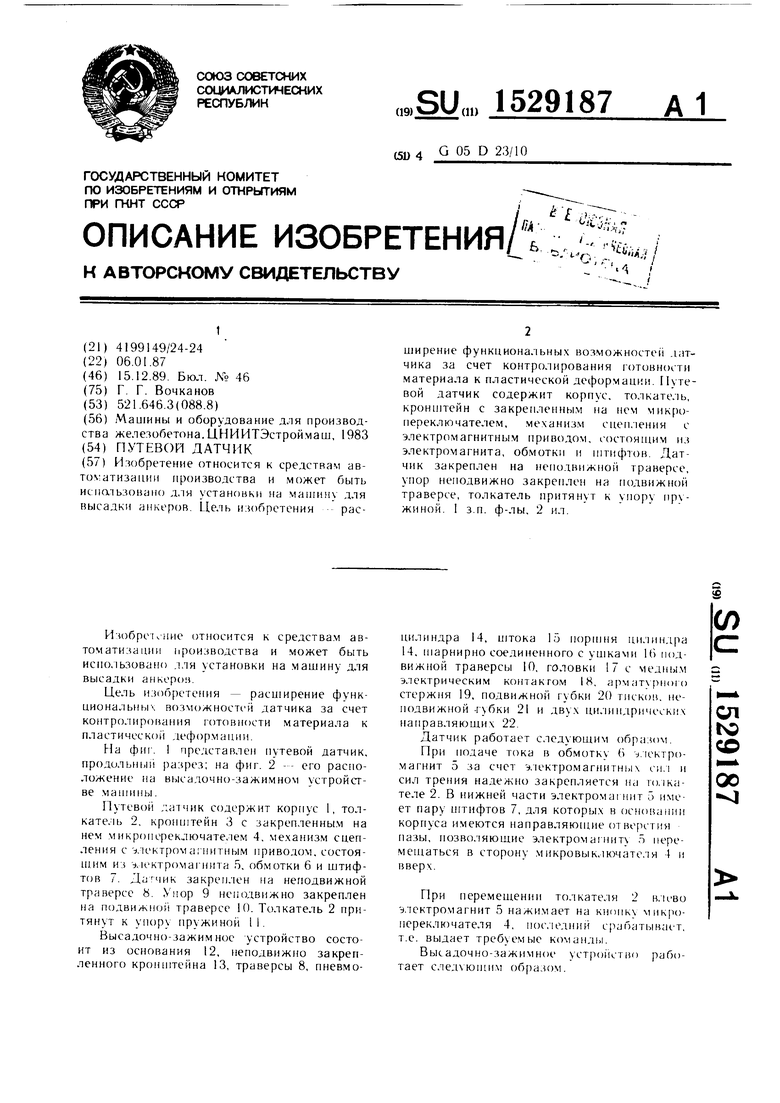
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для циклового программного управления | 1987 |
|
SU1603343A1 |
| Командоаппарат | 1984 |
|
SU1399833A1 |
| АВТОМАТ ДЛЯ ДВУСТОРОННЕЙ ВЫСАДКИ ДЕТАЛЕЙ СТЕРЖНЕВОГО ТИПА | 1971 |
|
SU307841A1 |
| Командоаппарат | 1984 |
|
SU1399832A1 |
| УСТАНОВКА ДЛЯ ВЫСАДКИ АНКЕРНЫХ ГОЛОВОК НА АРМАТУРНЫХ СТЕРЖНЯХ | 1971 |
|
SU319722A1 |
| Установка для укладки арматуры в форму | 1986 |
|
SU1384696A1 |
| Устройство коммутации электрических цепей | 1972 |
|
SU481949A1 |
| Способ образования анкера и устройство для его осуществления | 1990 |
|
SU1815320A1 |
| Коммутатор электрического тока | 1972 |
|
SU444260A1 |
| Система управления горизонтально-ковочной машиной | 1985 |
|
SU1299642A1 |
Изобретение относится к средствам автоматизации производства, может быть использовано для установки на машину для высадки анкеров. Цель изобретения - расширение функциональных возможностей датчика за счет контролирования готовности материала к пластической деформации. Путевой датчик содержит корпус, толкатель, кронштейн с закрепленным на нем микропереключателем, механизм сцепления с электромагнитным приводом, состоящим из электромагнита, обмотки и штифтов. Датчик закреплен на неподвижной траверсе, упор неподвижно закреплен на подвижной траверсе, толкатель притянут к упору пружиной. 1 з.п.ф-лы, 2 ил.
Изобрси-ние относится к средства.м автоматизации ||роизводства и может быть использовано лля установки на машину для высадки анкорон.
Цель изобретения - расширение функциональных возможностей датчика за счет контролирования готовности материала к пластической деформации.
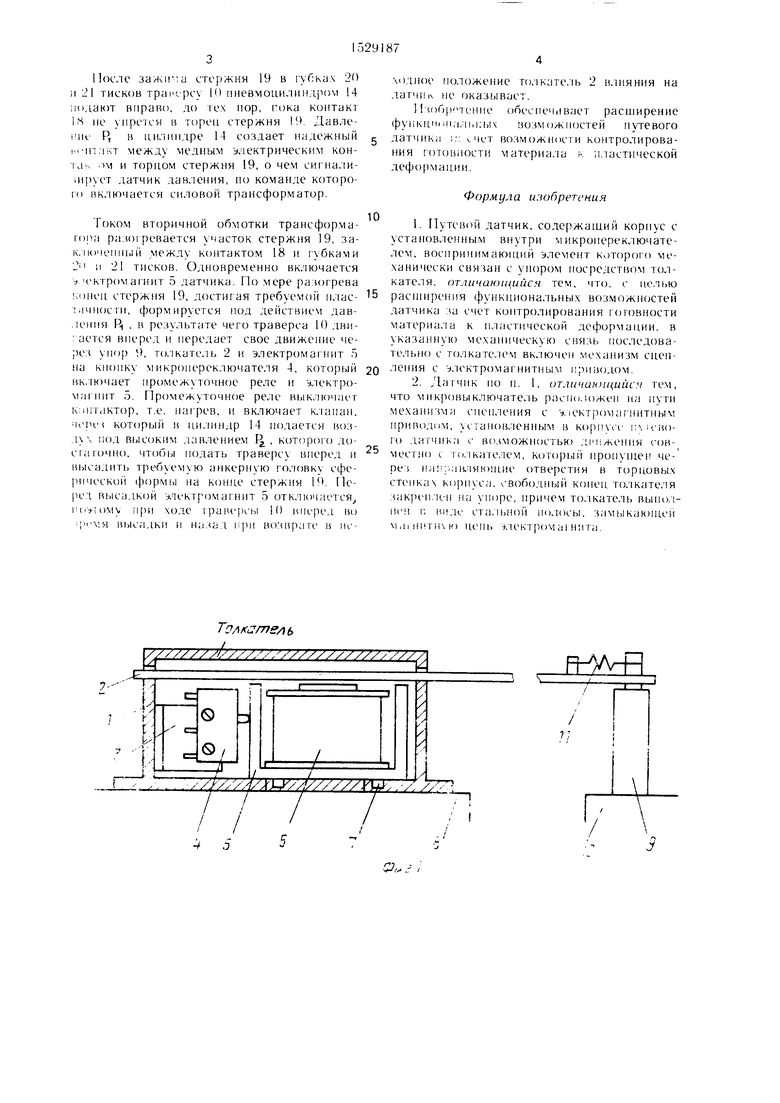
На фиг. I представлен путевой датчик, продольный разрез; на фиг. 2 - - его расположение иа высадочно-зажимном устройстве машины.
Путевой датчик содержит корпус I, толкатель 2, кропштейн 3 с закрепленны.м на нем микрог1ерек.;1ючателем 4, механизм сцепления с :1лектрома; 11итным приводом, состоящим из электромагнита 5, обмотки 6 и штифтов 7. Датчик закреплен на неподвижной траверсе 8. У)1ор 9 неподвижно закреплен на подвижной траверсе И). Толкатель 2 притянут к упору пружиной II.
Высадочно-зажимное устройство состоит из основания 12, неподвижно закрепленного кронштейна 13, траверсы 8, пневмоцилиндра 14, штока lo поршня цилиндра 14, шарнирно соединенного с ушками И) подвижной траверсы 10, головки 17 с медным электрическим контактом 18, арматурного стержня 19, подвижной губки 20 THCKOIS, неподвижной .губки 21 и дву.х цилиндрических нанравляюших 22.
Датчик работает следующим образом.
При подаче тока в обмотку 6 э.1сктро- магнит 5 за счет э,1ектромагнитн1,1 cn.i и сил трения надежно закрепляется на ro.iKa- теле 2. В нижней части электрома:пит 5 имеет пару П1ТИФТОВ 7, для которых в основании корпуса имеются направляющие отве Н тия пазы, позволяющие электрома питу 5 пере- .мещаться в сторону микровыклк:)чатсля 4 и вверх.
При перемещении толкателя 2 влево э.тектромагнит 5 нажимает на кнопку микро- переключате.тя 4, пос.медний cjianaTbiBaeT, т.е. выдает требуемые команд1 |.
Высадочно-зажимное ycTpoiicTiio работает следуюпшм образом.
ел to
со
00
Мосле зажича стержня 19 в губках 20 н 21 тисков rpai vpcy К) иневмоци-чиндром 14 )т BnpaEU), до тех пор, сока контакт IS не упрется в торен стержня 19, Давле- 1-ие Р, н цилиндре 14 создает надежный | |чпакт между медным мектрическим кон- la-, ом и торцом стержня 19, о чем сигна.1и- utpyeT датчик давления, но команде которо- 10 включается силовой трансформатор.
Током вторичной обмотки трансформатора разогревается участок етерж}1я 19, заключенный между контактом 18 и губками 2 I и 21 тисков. Одновременно включается - ектромагнит 5 датчика. По мере разогрева jjHeii стержня 19, достигая требуемой илас- 1чностн, формируется нод действием дав- .амшя Р-1 , Б результате чего траверса К) двигается внеред н передает свое движение через yiiof) 9, то.лкатель 2 и электромагнит 5 на кнопку микропереключателя 4, кото)|1|й вк.1ючает промежуточное реле и электромагнит 5. Промежуточное реле выключает K:iiiT iKTOp, т.е. нагрев, н включает клапан, itMHM который в пи:п1ндр 14 подается воз- д под высоким давление.м 1, которого до- сгаточно. чтобы подать траверсу вперед и высадить требуемую анкерную головку сфе- рпческо11 ||)орм)1 на Koinie стержня 19. Перед В1 1садк()й электромагнит 5 отключается, п)И ходе трари к-ы 10 вперед во высадки и назад прп возв)ате в мсТолк ::тельI
О
...Ji .. . . . //} /7yA7J}-y//J//////Y 4. ./. 77:7.
/ ./ / : / /
и л
ходное положение голкате. 1ь 2 влияния на датчик не оказывает.
()6 eifiHie обеспечивает расширение фупкци |||а;|ы:ых возможностей путевого датчика ;;; чст возможности контролирования ютовпостн материала к пластической деформации.
Формула изобретения
.3 SI
FPXv-H
77
| Маижны и оборудование для производства железобетона | |||
| ЦНИИТЭстрой.маш, 1983 |
