сд
оо
о
4 ОО IsD
ется по наклонному лотку устройства подачи и приема деталей и попадает в призму 12, жестко установленную на корпусе захватного устройства. Равновесие манипулятора нарушается, захватное устройство смещается вниз и его губки 13 взаимодействуют с выступами 19, выполненными на корпусе устройства загрузки-выгрузки деталей. Деталь освобождается губками захватного устройства и сбрасывается в наклонный лоток, после чего манипулятор поднимается под действием противовеса. 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сбалансированный манипулятор | 1987 |
|
SU1468739A1 |
| Манипулятор | 1988 |
|
SU1563969A1 |
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
| Устройство для загрузки и разгрузки многошпиндельных токарных полуавтоматов | 1973 |
|
SU512024A1 |
| Технологический комплекс для обработки цилиндрических деталей | 1983 |
|
SU1222492A1 |
| АВТОНОМНАЯ СБОРОЧНАЯ МОДУЛЬНАЯ ЯЧЕЙКА | 2021 |
|
RU2755994C1 |
| Манипулятор | 1988 |
|
SU1549747A1 |
| Токарный роботизированный технологический комплекс | 1985 |
|
SU1291291A1 |
| Гибкий производственный модуль | 1986 |
|
SU1404273A1 |
| Комбинированный агрегат биомелиорации земель с переработкой лесокустарника для утилизации щепы, древесной золы и подсева семян | 2020 |
|
RU2740173C1 |
Изобретение относится к машиностроению, а именно к робототехническим устройствам, и может быть использовано для обслуживания токарных станков. Цель изобретения - повышение производительности комплекса за счет совмещения операций загрузки и разгрузки захватного устройства. Роботизированный технологический комплекс состоит из технологического оборудования, манипулятора и устройства загрузки-выгрузки деталей. После завершения процесса обработки детали на технологическом оборудовании оператор опускает манипулятор, перемещая его выходное звено 11, и губками 13 захватного устройства снимает обработанную деталь. При этом равновесие манипулятора, определяемое противовесом, установленным на входном звене, нарушается, захватное устройство опускается и оператор устанавливает заготовку в патрон технологического оборудования. Затем манипулятор подводится к устройству подачи и приема деталей и упор 18, жестко установленный на корпусе захватного устройства, взаимодействует с заслонкой 17, перемещая ее вниз. При этом заготовка подается по наклонному лотку устройства подачи и приема деталей и попадает в призму 12, жестко установленную на корпусе захватного устройства. Равновесие манипулятора нарушается, захватное устройство смещается вниз и его губки 13 взаимодействуют с выступами 19, выполненными на корпусме устройства загрузки-выгрузки деталей. Деталей освобождается губками захватного устройства и сбрасывается в наклонный лоток, после чего манипулятор поднимается вверх под действием противовеса. 3 ил.
Изобретение относится к машиностроению, а именно к робототехничес|КИм устройствам, и может быть использовано для обслуживания токарных станков.
Цель изобретения - повьшение производительности зй счет совмещения операций загрузки и разгрузки захватного устройства.
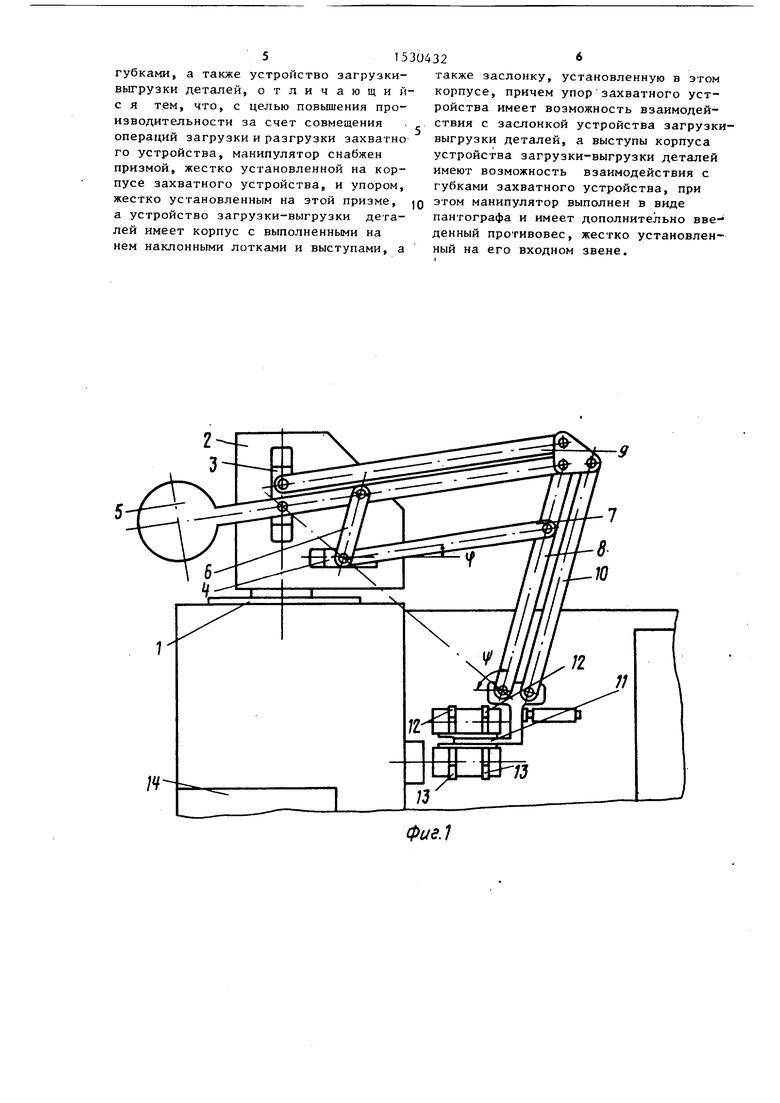
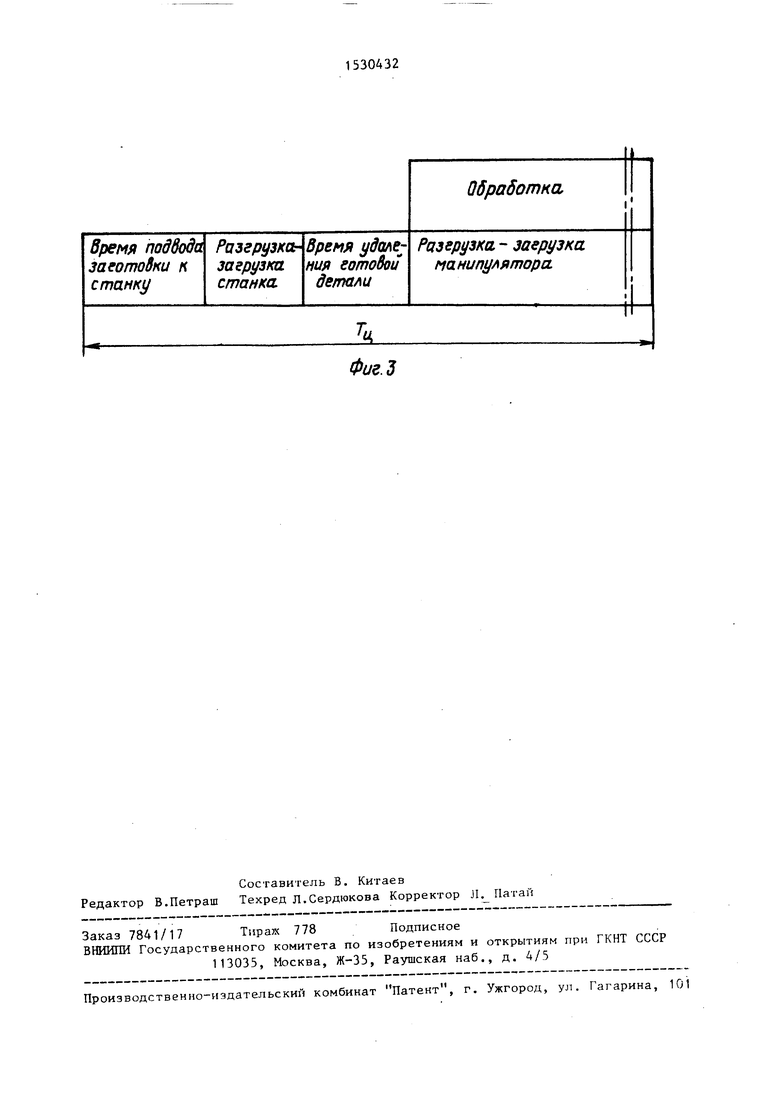
На фиг.1 представлен роботизированный технологический комплекс, общий вид; на фиг.2 - кинематическая схема устройства подачи заготовок и приема готовых деталейJ на фиг.З - циклограмма работы комплекса.
Роботизированный технологический комплекс содержит технологическое оборудование 1, манипулятор, имеющий опорно-поворотное устройство 2 с каретками 3 и 4 вертикального и горизонтального перемещения, стрелу, выполненную в виде пентографа,состоящего из входного звена 5, звеньев 6 и 7, грузового звена 8, штанги 9 и тяги 10. Выходное вено 11 несет на себе корпус захватного устройства с призмой 12 для захвата заготовки и губки 13 для захвата готовой детали.
Устройство 14 загрузки-выгрузки деталей состоит из наклонных лотков 15 и 16 соответственно для подачи заготовки и приема готовой детали и заслонки 17 поштучной подачи заготов ки. Захватное устройство снабжено упором 18, а устройство подачи и приема деталей - выступами 19.
Комплекс работает cлeдyюш м образом.
После завершения процесса обработки деталей на технологическом оборудовании опускают захватное устройств с заготовкой и губками 13 снимают обработанную деталь с патрона. При этом вследствие совместного действия весов заготовки и детали манипулятор становится неуравновешенным и опускается до положения, фиксируемого ограничителем, установленным в пазу ветикального перемещения (не показан), при котором ось призмы совмещена с осью патрона технологического оборудования .
В этом положении оператор устанавливает заготовку в патрон, вследствие чего восстанавливается уравновешенное состояние манипулятора, и оператор вручную подводит стрелу к устройству 14 загрузки-выгрузки деталей. Подвод стрелы к устройству 14 осуществляется ее поворотом на 90 и опусканием захватного устройства. Пр опускании упор 18 смещает заслонку 17, и заготовка по наклонному лотку попадает в призму. При этом вследствие действия суммарного веса заготовки и детали стрела становится неуравновешенной, захватное устройство опускается до контакта подпружиненных губок 13 с выступами 19,разжимающими губки, освобождая деталь на небольшой высоте от лотка 16 и восстанавливая уравновешенное состояние манипулятора.
После этого оператор вручную поднимает захватное устройство и устанавливает его над патроном. По завершении обработки цикл повторяется. Циклограмма работы станка с манипулятором комплекса представлена на фиг.3.
При опускании манипулятора с готовой деталью так же, как и при подъеме с заготовкой, помимо трения,преодолевается разница весов реального (деталь или заготовка) и условного манипулируемого объекта, т.е. половина разности весов заготовки и детали .
Формула изобретения
Роботизированный технологический комплекс, содержа11Д1й технологическое оборудование, манипулятор с захватным устройством, имеющим корпус с
губками, а также устройство загрузки- выгрузки деталей, отличающий- с я тем, что, с целью повышения производительности за счет совмещения операций загрузки и разгрузки эахватно го устройства, манипулятор снабжен призмой, жестко установленной на корпусе захватного устройства, и упором, жестко установленным на этой призме, а устройство загрузки-выгрузки деталей имеет корпус с выполненными на нем наклонными лотками и выступами, а
/V-
также заслонку, установленную в этом корпусе, причем упор захватного устройства имеет возможность взаимодействия с заслонкой устройства загрузки- выгрузки деталей, а выступы корпуса устройства загрузки-выгрузки деталей имеют возможность взаимодействия с губками захватного устройства, при этом манипулятор выполнен в виде пантографа и имеет дополнительно вве- денный противовес, жестко установленный на его входном звене.
РазгрузкаАВремя удале- загрузка ния еотовои станка детали
Обработка,
Разгрузка - заерузка манипулятора.
Фиг.З
| Козырев Ю.Г | |||
| Промьшшенные роботы | |||
| Справочник | |||
| - М.: Машиностроение, 1983, с | |||
| ПАРОПЕРЕГРЕВАТЕЛЬ ДЛЯ ТРУБЧАТЫХ ПАРОВЫХ КОТЛОВ С ЭЛЕМЕНТАМИ, СОСТОЯЩИМИ ИЗ ДВУХ ПЕТЕЛЬ, ВВОДИМЫХ В ПРОГАРНЫЕ ТРУБЫ КОТЛА | 1916 |
|
SU281A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
