Изобретение относится к робототехнике, более конкретно к захватам роботов-манипуляторов.
Цель изобретения - повышение надежности устройства.
На фиг.1 схематично изображен захват, разрез; на фиг.2 - разрез А-А на фиг.1; на фиг.З - узел I на фиг.2 в положении, когда отсутствует давление рабочей среды; на фиг.А - то же в положении при подаче давления рабочей среды.
Захват состоит из корпуса 1 с каналом 2 для подвода воздуха, который j сил возвращаться в исходное положе20
30
посредством шту ;еров 3 соединен с эластичными камерами 4 трубчатого сечения. Камеры 4 размещены в пазах 5 корпуса 1, в которых расположены также жесткие скобы 6 П-образного сечения, oxвaтывaю I Ie эластичные камеры 4. Выступы 7 скоб 6 имеют возможность перемещаться в радиальных направляю- 1 ШХ пазах 8 корпуса 1 .
Корпус 1 облегает эластичная обо- 25 лочка 9, которая крепится к корпусу 1 хомутом 10 и наконечником 11, выполненным в виде усеченного конуса. Последний закрепляется с помощью болта 12.
Захват работает следующим образом .
В ИСХОДНОМ положении эластичная оболочка 9 облегает корпус 1, скобы 6 за счет воздействия упругих сил со стороны оболочкг - заглублены в пазах 5. Эластичные трубчатые камеры 4 свободно деформируются под действием жестких скоб 6, так как в камере отсутствует давление воздуха. .Q
В таком состоянии захват вставляется в отверстие полой детали. Для лучшего центрирования при этом служит наконечник 11, выполненный в виде усеченного конуса,.,
Затем подается рабочее давление по каналу 2 и через штуцеры 3 в эластичные камеры 4, последние раздувают35
ние, заглубляя скобы 6 в пазах 5.
Итак, контакт захвата с деталью осуществляется через оболочку 9, которая непосредственно не воспринимае давление рабочей среды, поэтому нет необходимости обеспечивать герметичность самой оболочки 9 и мест закреп ления ее к корпусу 1. В то же время эластичные трубчатые камеры 4 защище ны от повреждений оболочкой 9 и скобами 6, которые охватывают камеры 4.
Формула Изобретения
1.Захват манипулятора для полых деталей, содержаш;ий корпус с коничес кой заходной частью и с каналом под вода рабочей среды, эластичную оболо ку, облегающую корпус, и скобы, расположенные в выполненных в корпусе радиальных направляющих пазах, о т- личающийся тем, что, с цел повышения надежности устройства, в корпусе выполнены пазы, в которых размещены дополнительные эластичные
камеры, сообщенные с каналом подвода рабочей среды, а каждая скоба раз мещена между эластичной оболочкой и дополнительными эластичными камерами и охватывает последнюю.
2.Захват поп.1, отличающийся тем, что скобы выпoJ нe- ны П-образного сечения.
ся и вытесняют скобы 6 (фиг .4) из- пазов 5 корпуса 1. Выступы 7 скоб перемещаются при этом по направляющим пазам 8,
Скобы 6 растягивают эластичную оболочку 9 до контакта ее с захватываемой деталью.
Таким образом, между захватываемой деталью и корпусом 1 захвата образуется жесткая связь.
При снятии рабочего давления эластичные камеры 4 теряют жесткость, что позволяет оболочке 9 за счет упругих
0
0
5
Q
,
5
ние, заглубляя скобы 6 в пазах 5.
Итак, контакт захвата с деталью осуществляется через оболочку 9, которая непосредственно не воспринимает давление рабочей среды, поэтому нет необходимости обеспечивать герметичность самой оболочки 9 и мест закрепления ее к корпусу 1. В то же время эластичные трубчатые камеры 4 защищены от повреждений оболочкой 9 и скобами 6, которые охватывают камеры 4.
Формула Изобретения
1.Захват манипулятора для полых деталей, содержаш;ий корпус с конической заходной частью и с каналом подвода рабочей среды, эластичную оболочку, облегающую корпус, и скобы, расположенные в выполненных в корпусе радиальных направляющих пазах, о т- личающийся тем, что, с целью повышения надежности устройства, в корпусе выполнены пазы, в которых размещены дополнительные эластичные
камеры, сообщенные с каналом подвода рабочей среды, а каждая скоба размещена между эластичной оболочкой и дополнительными эластичными камерами и охватывает последнюю.
2.Захват поп.1, отличающийся тем, что скобы выпoJ нe- ны П-образного сечения.
li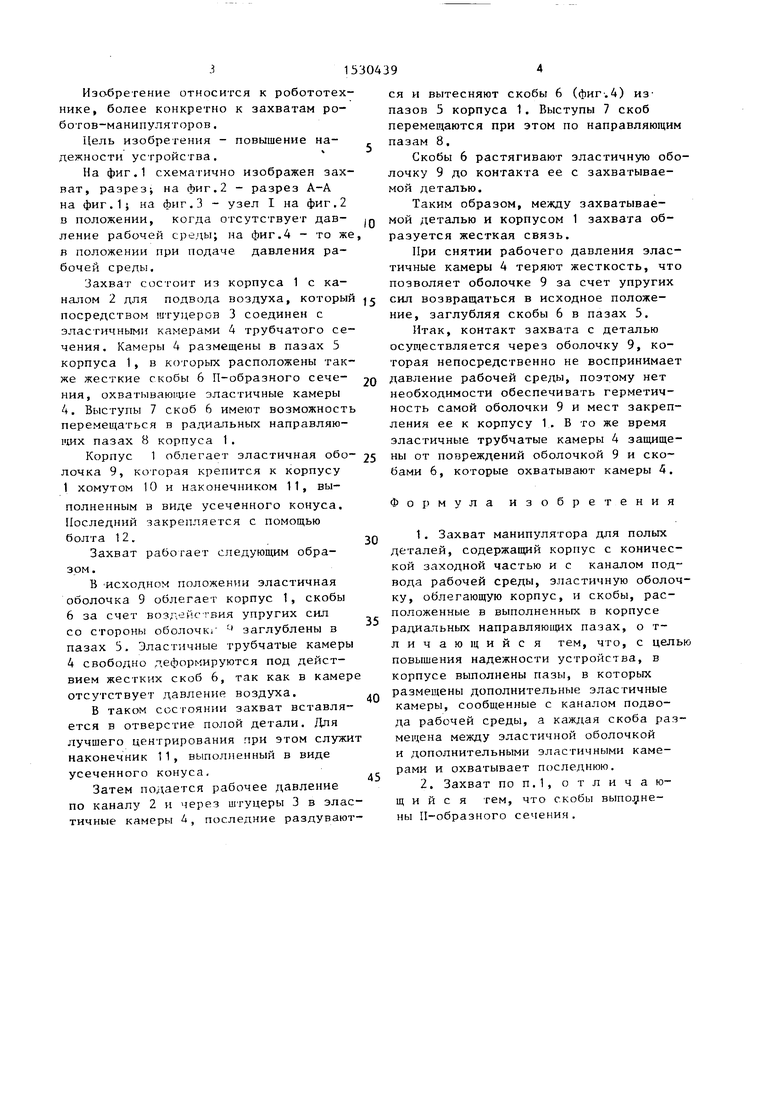
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора для полых деталей | 1980 |
|
SU946919A1 |
| Захват манипулятора | 1985 |
|
SU1281405A1 |
| Захват | 1988 |
|
SU1808698A1 |
| Схват манипулятора | 1991 |
|
SU1811479A3 |
| Захват промышленного робота | 1985 |
|
SU1299781A1 |
| ЭЛЕКТРОТЕРМИЧЕСКОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 1992 |
|
RU2043918C1 |
| Пневматический захват | 1989 |
|
SU1785893A1 |
| Бесштоковый силовой цилиндр | 1987 |
|
SU1498985A1 |
| Устройство для захвата полых деталей | 1982 |
|
SU1090525A1 |
| МОДУЛЬ МАНИПУЛЯТОРА | 1991 |
|
RU2022773C1 |

Изобретение относится к робототехнике, а именно к захватам роботов-манипуляторов. Цель изобретения состоит в повышении надежности устройства. Захват манипулятора для полых деталей содержит корпус 1 с каналом 2 для подвода воздуха, который посредством штуцеров 3 соединен с эластичными камерами 4 трубчатого сечения. Камеры размещены в пазах корпуса, в которых расположены также жесткие скобы П-образного сечения, охватывающие эластичные камеры 4. Скобы имеют выступы, которые могут перемещаться в радиальных направляющих пазах корпуса. Корпус 1 охватывает эластичная оболочка 9. В нижней части корпуса жестко закреплен конусообразный наконечник 11, улучшающий центрирование захвата и захватываемой детали. 1 з.п. ф-лы, 4 ил.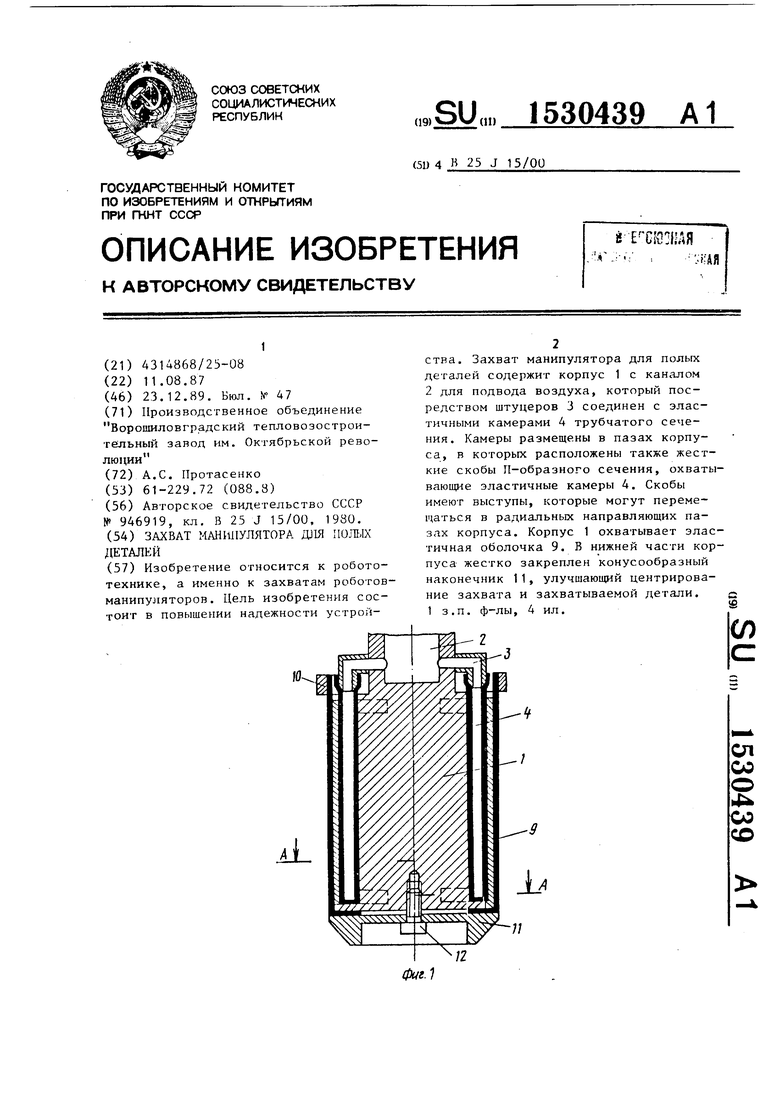
.
| Захват манипулятора для полых деталей | 1980 |
|
SU946919A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
