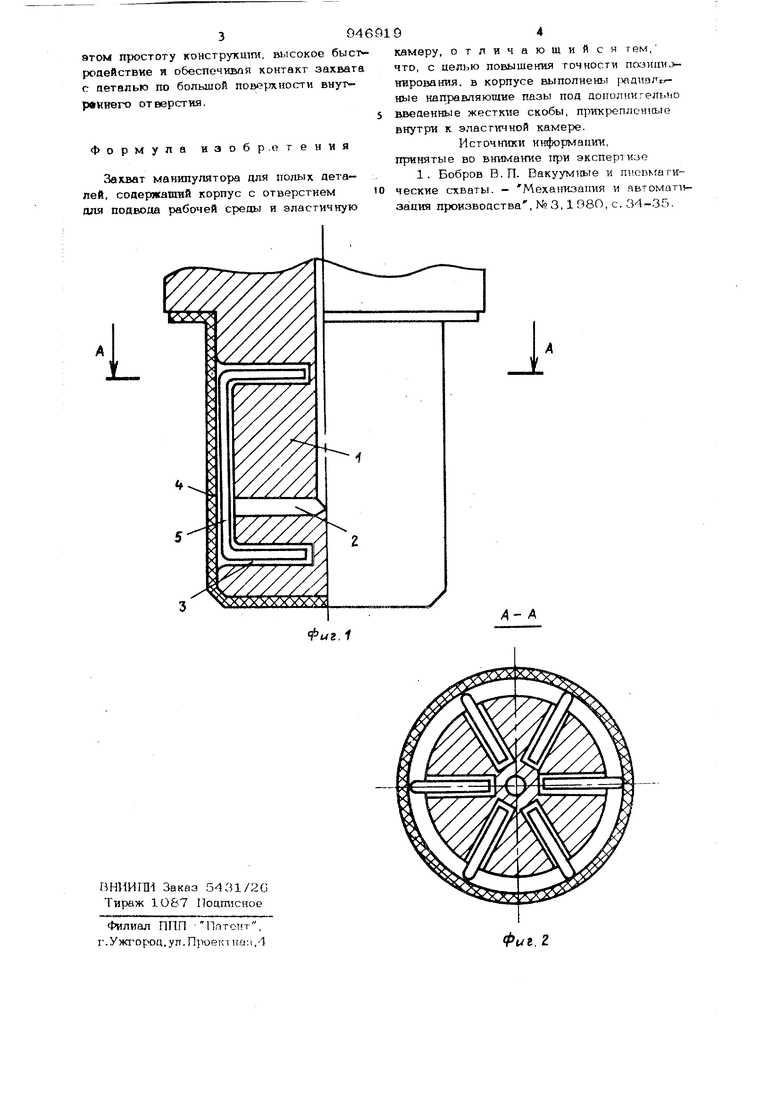
H3o6perotrae относится к робототехнике, более коикрегыо, к захватам ро бот ов-ма нипуля т оров. Извег:еп захват, содержащий корпус, с OTBepCTVieM аля подвода рабочей сре ды и эластичную камеру Г1 Недостатком известного захвата является т1зкая го-: ость позиционирования Цепь изобрегекия - ycTpaHetme указанного недостатка, т, е. повышение точ ности позиционироватш. Указанная цель достигается тем, что в корпусе выполнены радиальные напра&ляюпие пазь( под дополнительно введенны жесткие скобы, прикрепленные внутри к эластичной камере. fia ф;1г. 1 схематично изображен захв разрез; на фиг. 2 - разрез А-А на фиг. Устройсшо состоит из корпуса 1 с отверг гием 2 для подвода воздуха и на- правляющикти пазами 3, эластичной каме ры 4, и жестких скоб 5. Усгройстпо fi,a6oTaeT следующи 1 образом. В исходном положении э,пастичная камера 4 облегает корпус 1, скобы 5 np tлегаюг к корпусу 1 за счет воздействия упругих сил со стороны камеры 4, При подаче рабочего давления по отверстиям 2 для подвода воздуха внутрь камеры 4, последняя раздувается до диаметра отверстия в захплть1ваемой детали, что приводит к выдвижению скоб 5 но направляющим пазам 3 на соответствующую величину. Таким образом, между захватываемой деталью и корпусом 1 . .захвата образует ся жесткая связь, за счет которой значительно увеличивается точность позиииошьрования и, BNfecre с тем, не воз1шкает локальных нагрузок на захватываемую деталь. При снятии рабочего давлеши ка- мера 4 за счет упругих сил возвращает ся в исходное cocToamfe, придвигая скобы 5 вплотну-ч к корпусу 1 . П жменетю пpeдлaгae oгo устройства позволяет знаП повысить точность позииионировлння летали, сохгаияя при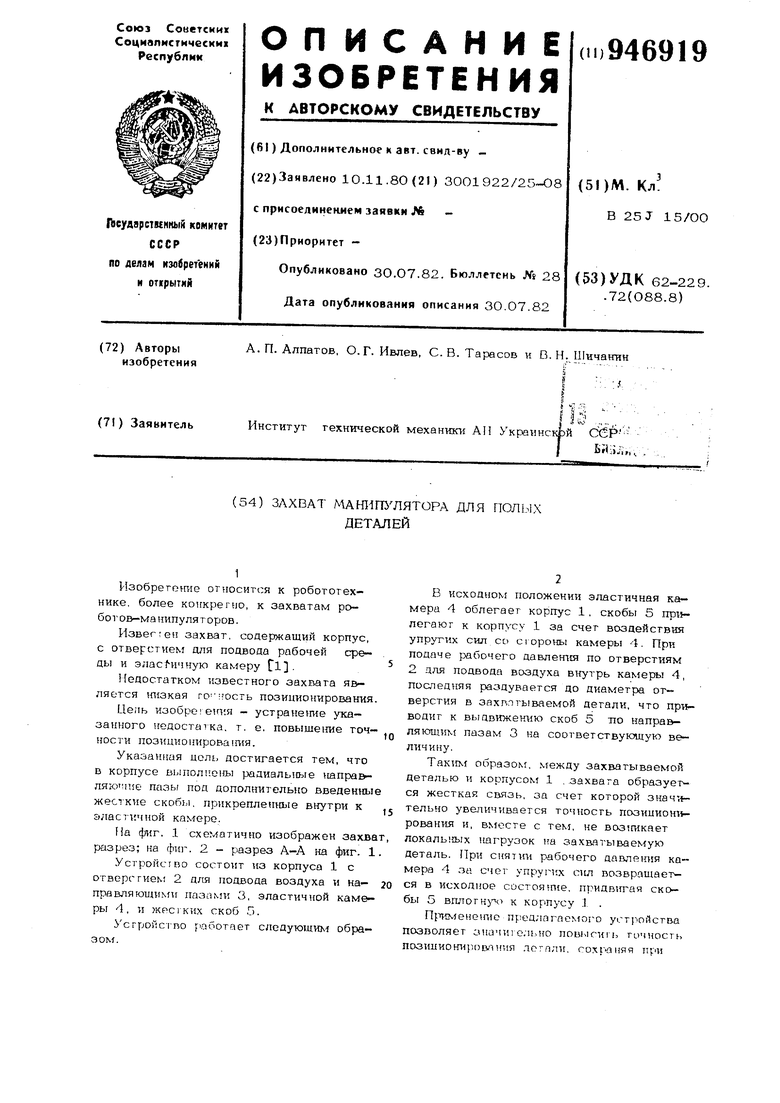
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора для полых деталей | 1987 |
|
SU1530439A1 |
| Схват манипулятора | 1985 |
|
SU1315304A1 |
| Захват | 1977 |
|
SU737206A1 |
| Многопозиционное захватное устройство | 1981 |
|
SU994254A1 |
| ВАКУУМНЫЙ ЗАХВАТ | 1990 |
|
RU2091208C1 |
| Схват промышленного робота | 1981 |
|
SU1006210A1 |
| Захват промышленного робота | 1987 |
|
SU1465308A1 |
| Схват манипулятора | 1985 |
|
SU1585149A1 |
| Автоматизированный комплекс для штамповки деталей | 1987 |
|
SU1581436A1 |
| Способ извлечения деталей из кассеты и устройство для его осуществления | 1989 |
|
SU1773680A1 |
