Изобретение относится к машиностроению и предназначено для использования в промытаеиных роботах, применяемых для выполнения подъемно- транспортных, монтажно-сборочных и технологических операций, а также в дистанционных манипуляторах.
Цель изобретения - расширение технологических возможностей за счет одновременного манипулирования двумя деталями.
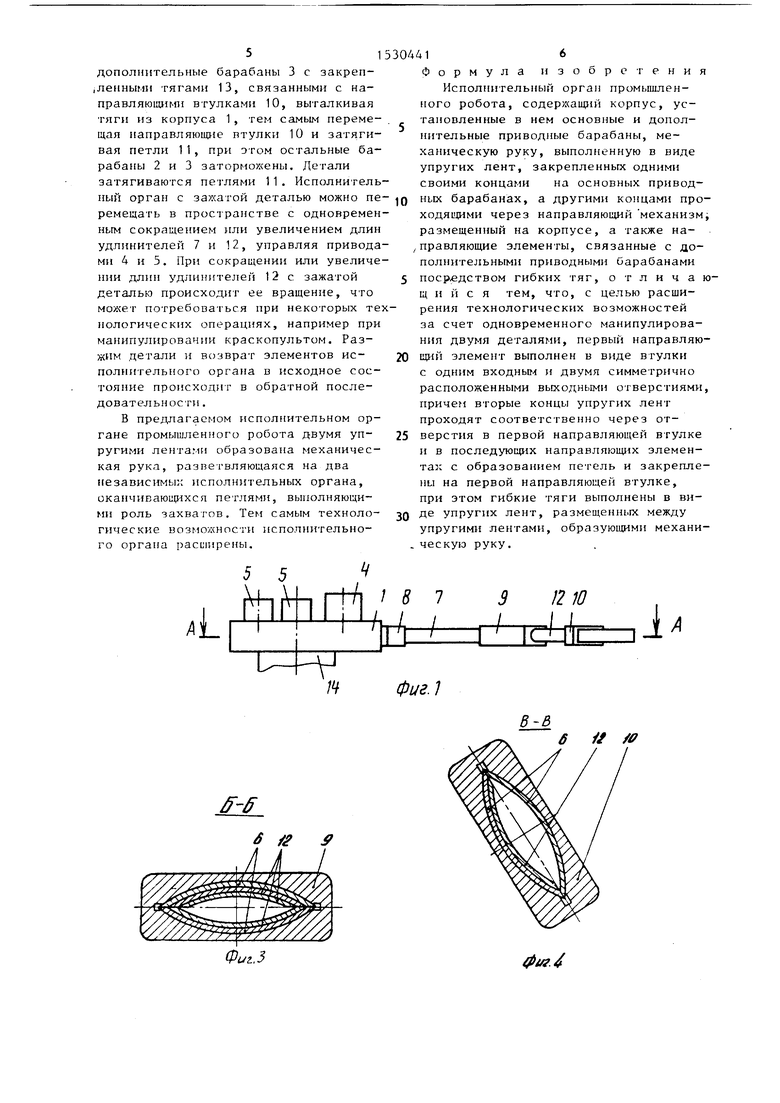
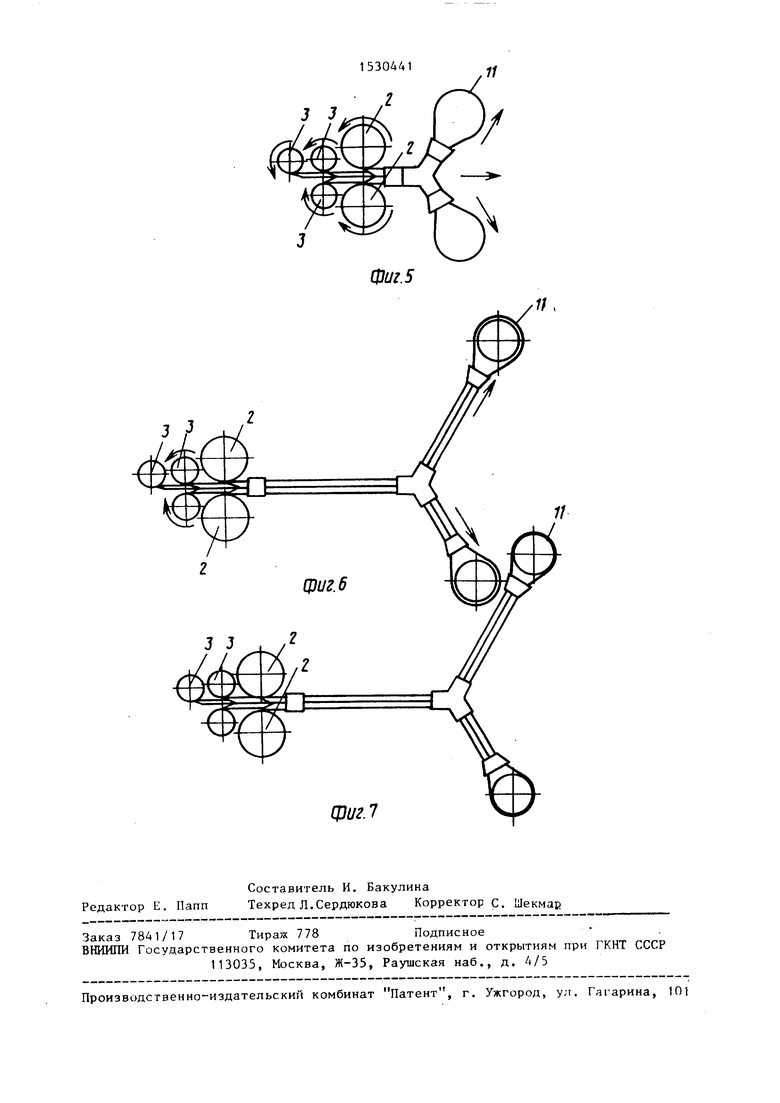
На фиг.1 изображен исполнительный орган промышленного робота, общий вид на фиг.2 - разрез А-А на фиг.1, на фиг.З - сечение Б-Б на фиг.2; на фиг. А - сечение В-В на фиг. 2, на фиг.З - схема исполнительного органа промьшленного робота в сложенном виде; на фиг.6 - то же, при захвате де тали; )ia фиг. 7 - то же, с зажатой деталью.
Исполнительный орган промышленного робота содержит корпус 1, внутри которого размещены основные барабаны 2 и дополнительные барабаны 3, связанные с приводами 4 и 5, например электродвигателями.
На основных барабанах 2 закреплены упругие ленты 6, представляющие собой сгальные корытообразные ленты и образуюи91е меха.;ическую руку (удлинитель) 7, имеющую в сечении замкнутый контур.
Упругие ленты 6 ооходят сквозь направляющий механизм 8, установленный на корпусе 1, первый направляющий элемент 9, выполненный в виде втулки с одним входным и двумя симметрично расположенными выходными отверстиями, в которой упругие ленты направлены по разнонаправленным отверстиям, образующие поверхности которых выполнены криволине.йными и проходят через последующие направляющие элементы 10, например направляющие втулки, образуя петли 11. Вторыми концами упругие ленты 6 закреплен в первом направляющем элементе 9. Тем самым между первым направляющим элементом 9 и направляющими втулками 10 образованы дополнительные удлинители 12. Направляющие втулки 10 и первый направляющий элемент 9 связан с упругими тягами 13, представляющими собой стальн яе корытообразные ленты, проходящие внутри замкнутого контура удлинителей 7 и 12.
0
5
о
5
0
5
0
5
0
5
Другие концы упругих тяг.13 закреплены на дополнительных барабанах 3. Исполнительный орган расположен на промьшшенном роботе 14.
Исполнительный орган промышленного робота работает следующим образом.
В исходном состоянии упругие ленты 6 намотаны на основные барабаны 2, тяги 13 намотаны на дополнительные барабаны 3, при этом направляюш 1й механизм 8, первый направляющий элемент 9 и направляющие втулки 10 располагаются вплотную друг к другу. При вращении основных барабанов 2 от приводов 4 упругие ленты 6 сматываются и выталкиваются из корпуса 1 через направляющий механизм 8 при одновременном сматывании тяг 13 при вращении дополнительных барабанов 3 от приводов 5, образуя механическую руку (удлинитель) 7. Удлинитель 7 выдвигается, при этом первый направляющий элемент 9 и направляющие втулки 10 располагаются вплотную друг к другу и выдвигаются вместе с удлинителем. Это движение происходит до тех пор, пока дополнительный барабан 3 с закрепленной тягой 13, связанной с первым направляющим элементом 9, не остановит свое вращение посредством тормоза в приводе 5 при достижении первым направляющим элементом 9 требуемой координаты. После того, как первьй направляющий элемент 9 перестанет двигаться, начинается выдвижение удлинителей 12 при одновременном вращении основных барабанов 2 и дополнительных барабанов 3 с закрепленными тягами 13, связанными с направляющими втулками 10. При этом скорость выдвижения упругих лент 6 должна быть в два раза больше скорости выдвижения соответствующих тяг 13. Это движение совершается до тех пор, пока основные барабаны 2 и дополнительные барабаны 3 не остано- сят свое вращение посредством тормозов в приводах 4 и 5 при достижении петлями 11 требуемых координат. Управляя приводами 4 и 5, удлинители 12 могут выдвигаться с разными скоростями и на разные длины, а также одновременно с вьщвижением удлинителя 7, а также в любой последовательности.
После того, как объекты манипули- ;рования, например детали, окажутся внутри петель 11, начинают вращаться
дополнительные барабаны 3 с закреп- (Ленными тягами 13, связанными с на- правляющигп втулками 10, выталкивая тяги из корпуса 1, тем самым перемещая направляющие втулки 10 и затягивая петли 11, при этом остальные барабаны 2 и 3 заторможены. Детали затягиваются петлями 11. ИсполнительФормула изобретения
Исполнительный орган промышленного робота, содержащий корпус, установленные в нем основные и дополнительные приводные барабаньг, механическую руку, выполненную в виде упругих лент, закрепленных одними своими концами на основных привод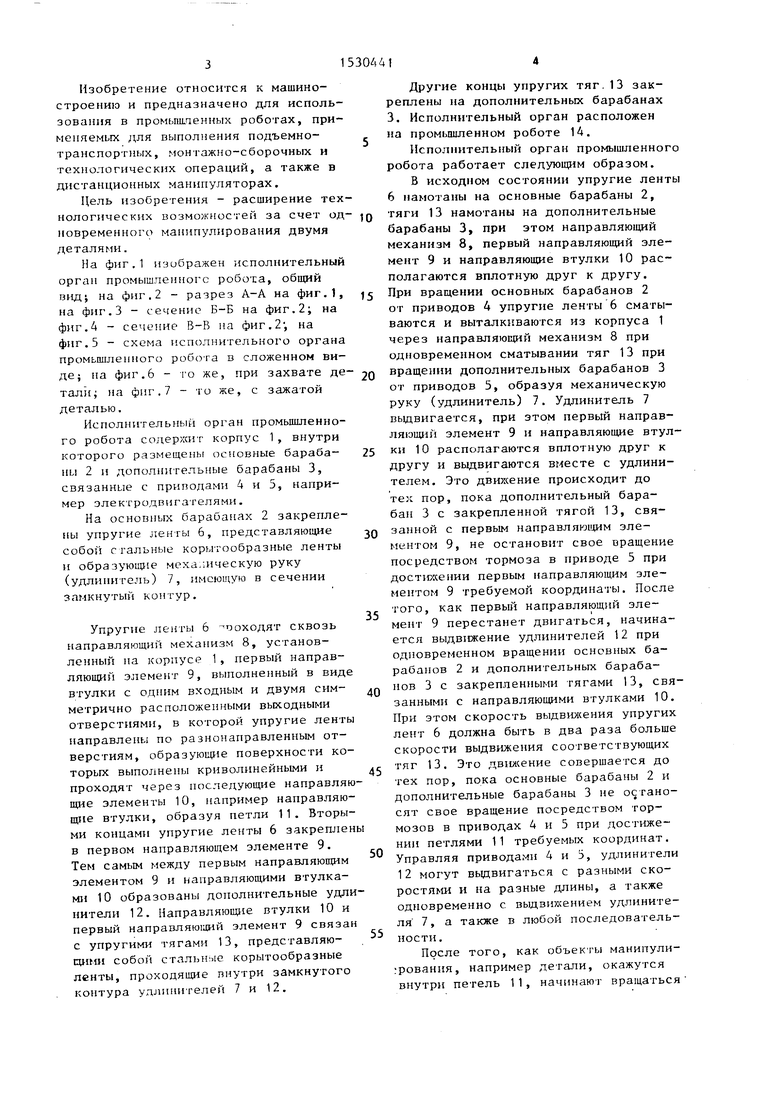
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган промышленного робота | 1988 |
|
SU1530442A1 |
| Исполнительный орган промышленного робота | 1987 |
|
SU1440711A1 |
| Исполнительный орган промышленного робота | 1987 |
|
SU1504095A1 |
| Исполнительный орган промышленного робота | 1988 |
|
SU1521589A1 |
| Исполнительный орган промышленного робота | 1987 |
|
SU1493462A1 |
| Промышленный робот | 1986 |
|
SU1400883A1 |
| Исполнительный орган промышленного робота | 1987 |
|
SU1437220A1 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| Исполнительный орган | 2020 |
|
RU2774238C2 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2774113C2 |
Изобретение относится к машиностроению и предназначено для использования в промышленных работах, применяемых для выполнения подъемно-транспортных, монтажно-сборочных и технологических операций, а также в дистанционных манипуляторах. Целью изобретения является расширение технологических возможностей исполнительного органа за счет одновременного манипулирования двумя деталями. Для этого упругие ленты 6 проходят сквозь направляющий механизм 8, установленный на корпусе 1, и первый направляющий элемент 9. Поскольку направляющий элемент выполнен в виде втулки с одним входным и двумя симметрично расположенными выходными отверстиями, упругие ленты 6 направляются по этим разнонаправленным отверстиям, а далее проходят через последующие направляющие элементы 10, например направляющие втулки, образуя петли 11. Вторыми концами упругие ленты 6 закреплены в первом направляющем элементе 9. Направляющие втулки 10 и первый направляющий элемент 9 связаны с упругими тягами 13, представляющими собой стальные корытообразные ленты, проходящие внутри замкнутого контура удлинителей. 7 ил.
ный орган с зажатой деталью можно пе- Q ных барабанах, а другими концами про- ремещать в пространстве с одновремен- ходящими через направляющий механизму HLtM сокращением или увеличением длин размещенный на корпусе, а также на- удлинителей 7 и 12, управляя привода- правляющие элементы, связанные с дополнительными приводными барабанами
ми 4 и 5. При сокращении или увеличении длин удлинителей 12 с зажатой деталью происходит ее вращение, что может потребоваться при некоторых технологических операциях, например при манипулировании краскопультом. Разжим детали и возврат элементов исполнительного органа в исходное состояние происходит в обратной последовательности .
В предлагаемом исполнительном органе промышленного робота двумя упругими лентами образована механическая рука, разветвляющаяся на два независимых исполнительных органа, оканчивающ 1хся петлями, выполняющипоср дством гибких тяг, отличаю- щ и и с я тем, что, с целью расширения технологических возможностей за счет одновременного манипулирования двумя деталями, первый направляю20 щий элемент выполнен в виде втулки с одним входньо и двумя симметрично расположенными выходными отверстиями, причем вторые концы упругих лент проходят соответственно через от-
25 верстия в первой направляющей втулке и в последующих направляющих элемен- тазс с образованием петель и закреплены на первой направляющей втулке, при этом гибкие тяги выполнены в ними роль захватов. Тем самым техноло- зО упругих лент, размещенных между
гические возмоиности исполнительного органа расширены.
Фиг.З
поср дством гибких тяг, отличаю- щ и и с я тем, что, с целью расширения технологических возможностей за счет одновременного манипулирования двумя деталями, первый направляющий элемент выполнен в виде втулки с одним входньо и двумя симметрично расположенными выходными отверстиями, причем вторые концы упругих лент проходят соответственно через от-
верстия в первой направляющей втулке и в последующих направляющих элемен- тазс с образованием петель и закреплены на первой направляющей втулке, при этом гибкие тяги выполнены в ниупругими лентами, образующими механи- . ческую руку.
ipi/eJ
м.4
фиг. 6
3 J
фиг. 7
1530441
фиг. 5
| Исполнительный орган промышленного робота | 1987 |
|
SU1437220A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
