СП
О 4
О
сл
фиг. 2
Изобретение относится к машиностроению и предназначено для использования в промышленных роботах, применяемых для выполнения под ьемно-транспортных, мон- тажно-сборочных операци;, а также в дистан ционных мапипу.чяторах, работаюихих в зонах )адиоактивного из.тучения, в космосе,
He. ib изобретенияснижение : нер1Ч)затрат за счет уменьшения фиводо.
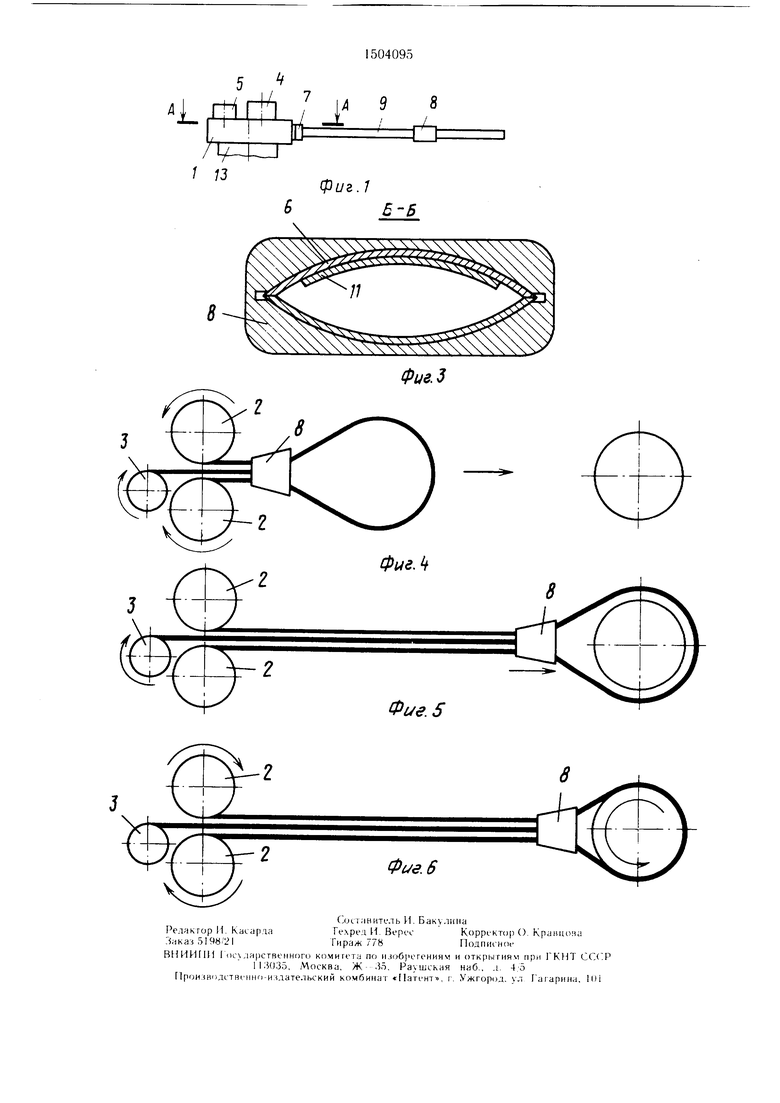
На фи1 . 1 изображен исполнительный орган промьниленного робота, общий вид; на фиг. 2 разрез А -А на фиг. 1; на фиг. 3 сечение Б Б на фиг. 2; на фиг. 4 схема исполнительного органа промышленно- 10 робота при выд и1жении уд.тините.ля; на фиг. 5 то же, при захвате детали; на фиг. 6 то же, нри вращении детали.
Иснолнительный орган промы1пленного робота содержи кориус 1, внутри которого размеш ены основные барабаньл 2 и дополнительный барабан 3, связанные с ий- дивидуальными приводами 4 и 5. На основных барабанах 2 закрен;1ена своими концами основная упругая лента 6, например, стальная. Основная унругая лента 6, нроходя ветвями через направляющий механизм 7, закрепленный на корпусе 1, нреобретает корытообразную форму, образуя на участке между нанравляюн|им механизмом 7 и нанрав. 1яюнхей втулкой 8, сквозь которую также проходит упругая лента 6, удлинитель 9, имеюший в сечении замкн ты11 контур. На участке за направляюшей ыул- кой 8 образуется петля 10. Направляю- П1ая втулка и связана с гягой 11, пределав- . |яюш,ей собой упругую ленту, проходящую внутрн за.мкнутмю ко 1тура удлинителя 9, через дополиительпую направляющую втулку 12 и связанную другим концом с дополнительным барабаном 3. Дополнительная нанравляюн1ая втулка 12 жестко связана с корпусом 1, Исполнительный орган рас- но,|1Ожен на промьпиленном роботе 13. Нанравляюнхий механизм 7, направляющая вту. жа 8 и дополнительная направляющая вту.лка 12 изготавливаются из материала с малым коэффипиен гом трения, например, из фтороп, 1аста.
Исполнительный орган промышленного робота работает следующим образом.
В исходном состоянии основная упругая лента Г) намотана на основные барабаны 2, петля 10 располагается вб, 1изи корпуса 1, тяга 11 намотана на дополнительный барабан 3. При в)ашении основ
ных барабанов 2 от приводов 4 основная упругая лента Н сматывается и выгалкивает- ся из корпуса 1, пpoxoJ я через нанрав.ляю- щий механизм 7, образуя удлинитель 9. При этом одновременно сматывается и тя
5
Q 5
20 25 0
5
35
0
га 11 с врашаюнгегося дополнительного барабана 3 от привода 5. Петля К) таким образом выдвигается на уд.линителе 9 на требуемую длину и раснолаг ается над деталью. Затем промышленный робот 13 опускает весь исполнительный орган, петля И) надевается на деталь.
Затем при заторможенных основных барабанах 2 начинает вращаться дополнительный бараба)1 3, сматывая закрепленную на нем одним концом тягу 11, тем еамы.м нере- мещая нанрав.1яюн1,ую втулку 8 и затягивая петлю 10. Деталь затягивается петлей 10. Иснолнительный орган с зажатой деталью можно перемещать в пространстве с одновременным удалением или приближением петли 10 с деталью к корпусу 1 путем одновременного сматывания или наматывания основной упругой ленты 6 и тяги 1 1 на основные барабаны 2 и донолнитель- ный барабан il
Также дета„ 1ь можно врапшть путем наматывания одного конца основной упругой лепты 6 и сматывания другого ее конца па основные барабаны 2 при заторможенном дополнительном барабане 3.
После установки детали в нужную позицию и осуществления ее поворота петля 10 отпускает деталь путем наматывания тяги 11 на дополпительный барабан 3, неремещая направляющую втулку 8 к корпусу 1. Про- МЫП1 лепным 1М)богом 13 исполнительный орган поднимается над дета.тью. Одновременным наматыванием основной угфугой ленты 6 и тяги 1 I на основные барабаны 2 и допол- ните:1ьный барабан ii псмля К) П|)ини.мает исходпое положение у K(jj)nyca I.
Формула изобретени.ч
Исполнительный орган гфомышленного робота, содержащий корпус, установленные в нем основные и дополните,:1ьный барабаны с индивндуа,1ьными приводами, направляющий механизм, закрепленш ш на корнусе, основную упрукю ленту, нроходя- нхую через на1фавляющий механизм и на- прав, 1яющую втулку, образующую петлю и своими концами жестко связанную с соответствующими основными барабанами, и 1 иб- кую тягу, связанную своими концами с до- гю;1ните,П)Ным барабаном и с нагфав, 1яю- шей втулкой, отличающийся тем, что, с це.чью снижения энергозатрат за счет уменьшения приводов, он снабжен дополнительной направляющей втулкой, закрепленной на корнусе, а 1 ибкая тя1 а выполнена в виде упругой ленты, проходящей через дополннтель- ную на1фавлию1цую втулку и к лость, образованную ветвями основной упругой ленты.
5
9 8
J-,
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган промышленного робота | 1987 |
|
SU1440711A1 |
| Промышленный робот | 1986 |
|
SU1400883A1 |
| Исполнительный орган промышленного робота | 1988 |
|
SU1530442A1 |
| Исполнительный орган промышленного робота | 1988 |
|
SU1530441A1 |
| Исполнительный орган промышленного робота | 1987 |
|
SU1493462A1 |
| Исполнительный орган промышленного робота | 1988 |
|
SU1521589A1 |
| Исполнительный орган промышленного робота | 1987 |
|
SU1437220A1 |
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ОБЪЕКТА | 2012 |
|
RU2530585C2 |
| Механизм позиционирования исполнительного органа | 1983 |
|
SU1114548A2 |
| Манипулятор | 1988 |
|
SU1576314A1 |
Изобретение относится к машиностроению и предназначено для использования в промышленных роботах, применяемых для выполнения подъемно-транспортных, монтажносборочных и технологических манипуляторах, работающих в зонах радиоактивного излучения в космосе. Целью изобретения является снижение энергозатрат за счет уменьшения приводов. Для этого в корпусе 1 размещены основные барабаны 2 и дополнительный барабан 3, связанные с индивидуальными приводами. На основных барабанах 2 закреплена своими концами основная упругая лента 6, например стальная. Основная упругая лента 6, проходя ветвями через направляющий механизм 7, закрепленный на корпусе 1, преображает корытообразную форму, образуя на участке между направляющим механизмом 7 и направляющей втулкой 8 удлинитель 9, имеющий в сечении замкнутый контур. А на участке за направляющей втулкой 8 образуется петля 10. Направляющая втулка 8 связана с тягой 11, представляющей собой упругую ленту, проходящую внутри замкнутого контура удлинителя 9, через дополнительную направляющую втулку 12 и связанную другим концом с дополнительным барабаном 3. Дополнительная направляющая втулка 12 жестко связана с корпусом 1. 6 ил.
/ ;з
(pi/a. 7
5 В-В
A SJ
Фие.5
Фие.6
| Исполнительный орган промышленного робота | 1987 |
|
SU1440711A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
