Изобретение относится к грузоподъемным устройствам и может быть использовано при производстве строительных и монтажных работ,, в частности работ, проводимых в стесненных условиях, например в боксах реакторного отделения и спецкорпуса АЭС.
Цель изобретения - расширение функциональных возможностей путем обеспечения самозагрузки-разгрузки подъемной площадки одновременно с ее подъемом-опусканием.
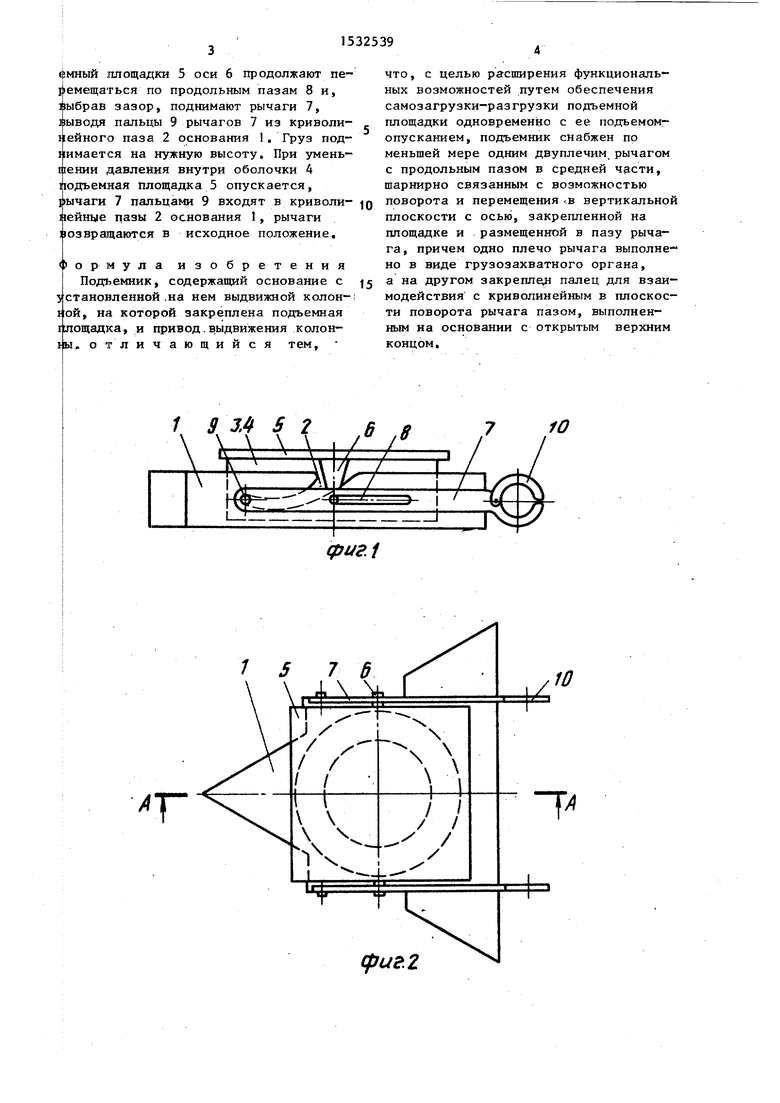
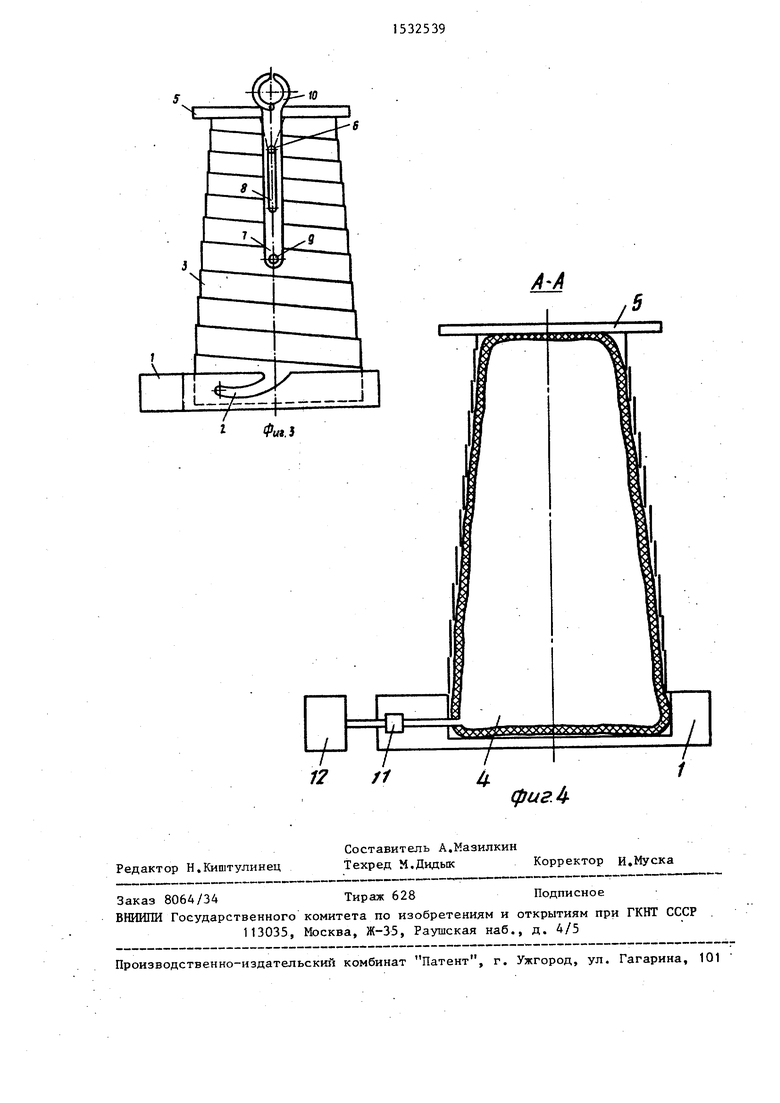
На фиг.1 изображено устройство в исходном положении, общий вид; на фиг.2 - то же, вид сверху; на фиг.З- устройство в рабочем положении; на фиг.4 - разрез А-А на фиг.2.
Подъемник содержит основание 1 с криволинейными пазами 2, колонну 3 из ппоской пружинной ленты с оболочкой 4 из эластичного материала, подьемную площадку 5 с осями 6, двуплечие рычаги 7 с продольными пазами 8 и пальцами 9, грузозахватными органами 10, арматурой 11, соединенной с приводом 12.
Подъемник работает следующим образом.,
В органах 10 двуплечих рычагов 7 закрепляется груз. Через арматуру 11 сжатый воздух подается в эластичную оболочку 4, заставляя подниматься подъемную .площадку 5, которая своими осями 6 воздействует йа рычаги 7 и груз поднимается. Груз перемещается по дуге окружности, центром которой является палец 9 рычага 7, находящийся в нижней точке криволинейного паза 2. Одновременно с перемещением подъемной площадки 5 цз основания поднимается плоская пружинная лента, образующая колонну 3, которая воет принимает усилия от избыточного давления, внутри оболочки 4. Груз перемещается рычагами 7 на подъемную площадку 5. При дальнейшем подъеме подъ(Л
ел
00 1x0 СП
ОР
(мный ;гшощадки 5 оси 6 продолжают перемещаться по продольным пазам 8 и, пыбрав зазор, поднимают рычаги 7, лыводя пальцы 9 рычагов 7 из криволинейного паза 2 основания 1, Груз поднимается на нужную высоту. При уменьшении давления внутри оболочки 4 подъемная Площадка 5 опускается, рычаги 7 пальцами 9 входят в криволи- нейные пазы 2 основания 1, рычаги возвращаются в исходное положение,
«Формула изобретения
Подъемник, содержащий основание с установленной.на нем выдвижной колон1 ой, на которой закреплена подъемная площадка, и привод.выдвижения колонны, о т л ичающийся тем.
что, с целью расширения функциональных возможностей путем обеспечения самозагрузки-разгрузки подъемной площадки одновременно с ее подъемом- опусканием, подъемник снабжен по меньшей мере одним двуплечим рычагом с продольным пазом в средней части, шарнирно связанным с возможностью поворота и перемещения -в вертикальной плоскости с осью, закрепленной на площадке и размещенной в пазу рычага, причем одно плечо рычага выполнено в виде грузозахватного органа, а на другом закрепле,н палец для взаимодействия с криволинейным в плоскости поворота рычага пазом, выполненным на основании с открытым верхним концом.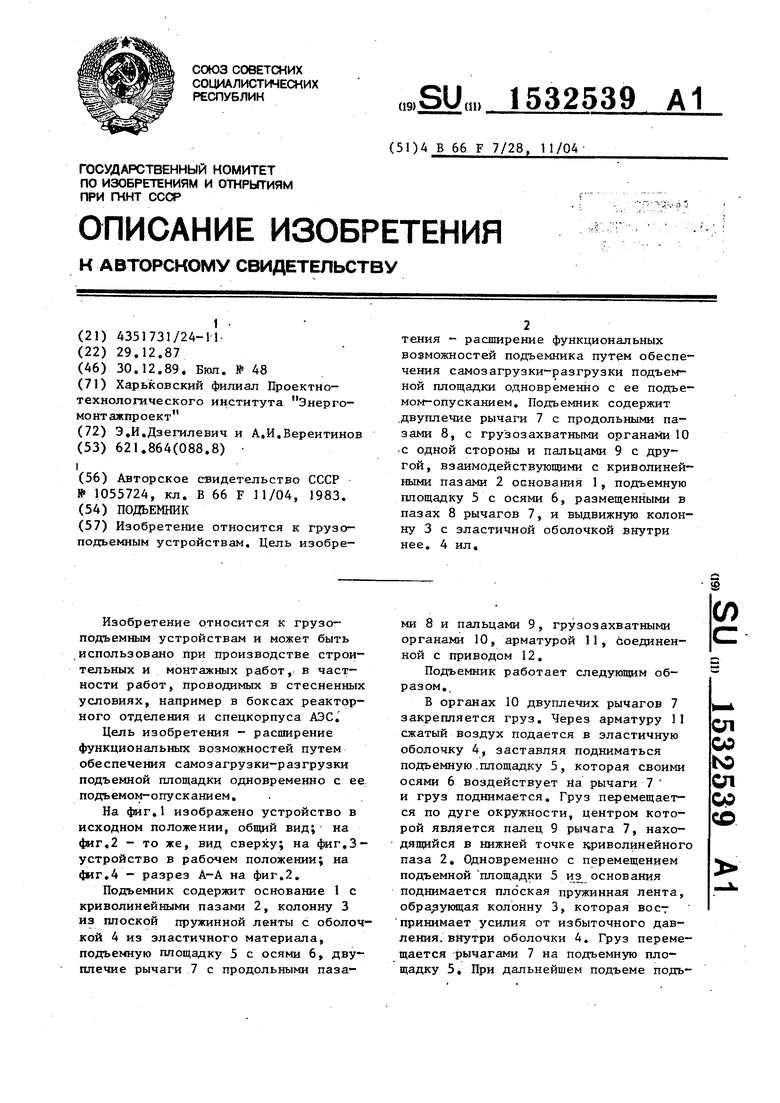
| название | год | авторы | номер документа |
|---|---|---|---|
| Телескопический подъемник | 1990 |
|
SU1754641A1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| Грузоподъемная площадка крана-штабелера | 1980 |
|
SU981126A1 |
| Вилочный захват для штучных грузов | 1987 |
|
SU1418259A1 |
| Грузозахватное устройство | 1988 |
|
SU1504197A1 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
| ПОДЪЕМНИК ГИДРАВЛИЧЕСКИЙ | 2011 |
|
RU2458849C1 |
| Грузозахватное устройство | 1987 |
|
SU1437340A1 |
Изобретение относится к грузоподъемным устройствам. Цель изобретения - расширение функциональных возможностей подъемника путем обеспечения самозагрузки-разгрузки подъемной площадки одновременно с ее подъемом-опусканием. Подъемник содержит двуплечие рычаги 7 с продольными пазами 8, с грузозахватными органами 10 с одной стороны и пальцами 9 с другой, взаимодействующими с криволинейными пазами 2 основания 1, подъемную площадку 5 с осями 6, размещенными в пазах 8 рычагов 7, и выдвижную колонну 3 с эластичной оболочкой внутри нее. 4 ил.
S2
.В
I /
tr/
Л.КТ
Г
.ВЦ
W
ери г. 2
12 //
,
фагЛ
| Подъемник | 1982 |
|
SU1055724A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
