i (j6pei та (иное niv/i t 11 i. in ,ранс nopiHo i маширюе трое ни о и може i быть ис по ib ювано в качест BI пре юхраните ibnoi о Устройства в гр шпо i ,e н .ix машинах преимч икпвенно i :ч uipinj фиксации в аварийной CHI nun
Цель июбреченчяповышение на
дежности работы
На фи1 покажи i ы 1ь мя i.oz hUMatMoro ip i,i на фп pa фез
А на фн i на |ч i разре з
Ь Ь на фиг I На фи 4R i I на фш
на |)нг 5i I фш I ча фиг Ь
v к ч III на фш I
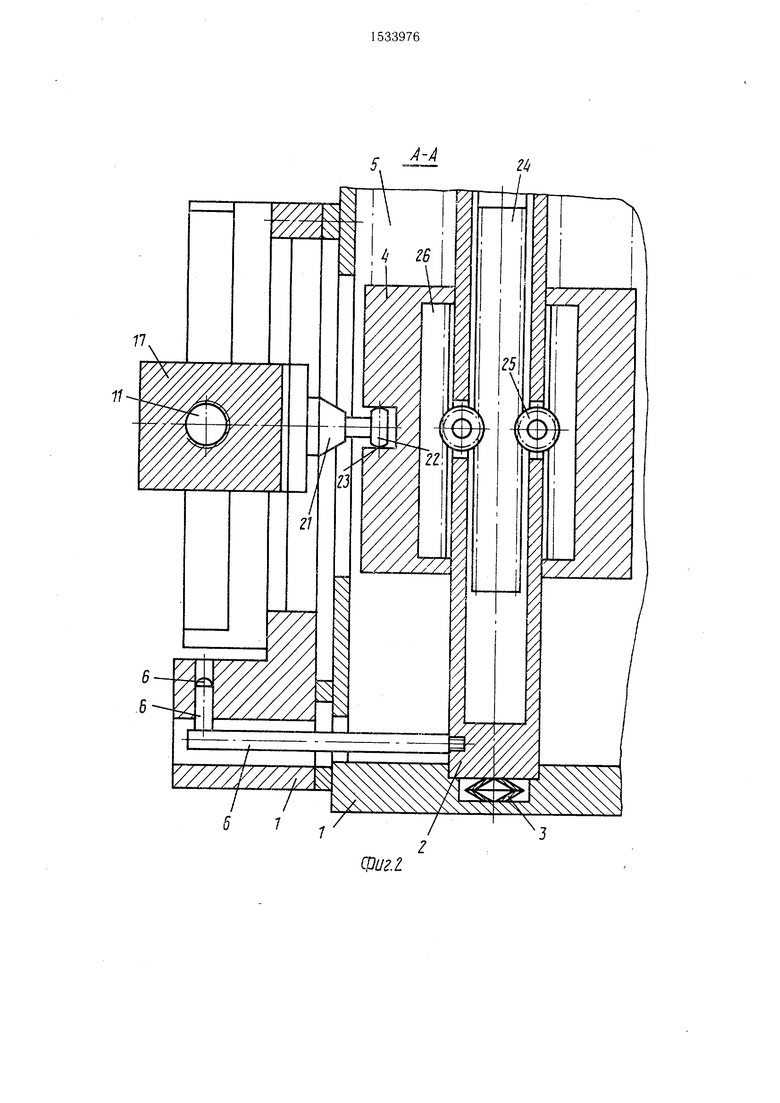
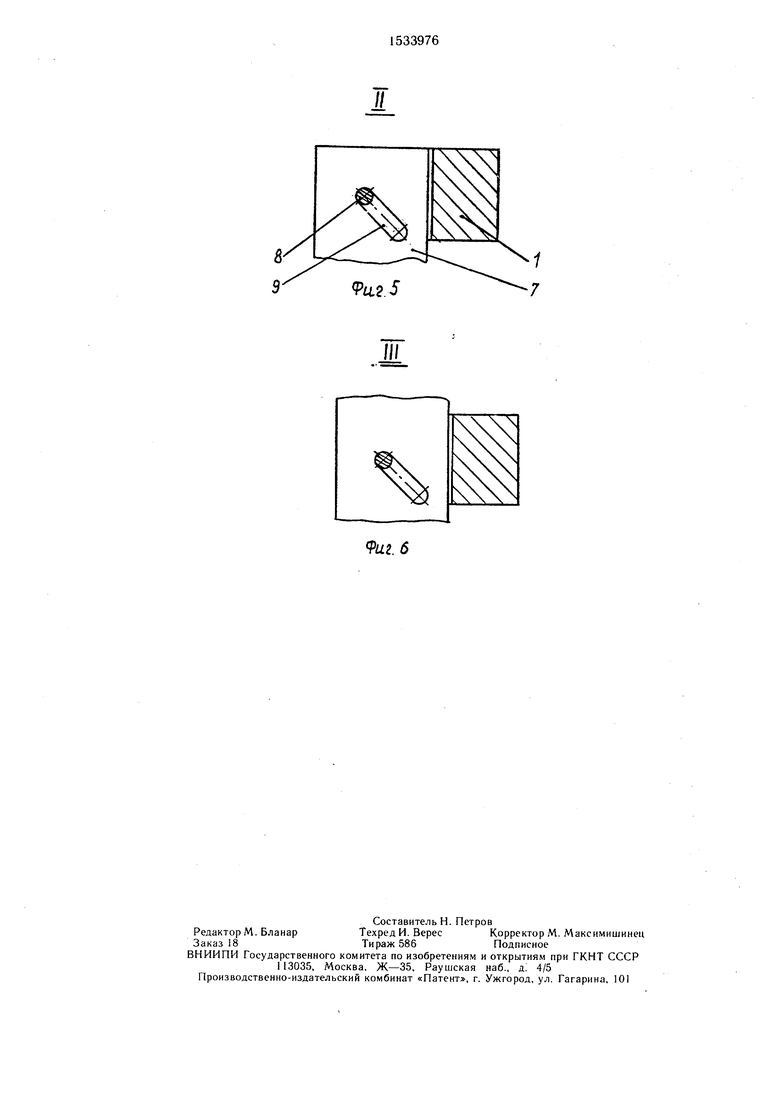
Повик i со UY/KI i ()iii i i (аправ лрющей J п анпв it иной в нем на пр кине } Рабо1 ая п юшати i } е КОР ie образным i р юм г ( oh к ча с чо мо/кностью вертнла ibH i перемешен. 1Я io н«прав 1ЯЮ1ШИ 2
Направ 1яюш )я 2 IKAJKK вом клиновых топка ie 1еи fi свя г на с ii 1анл и 7 которая е i юв ien, в к) 1 ia iiiTucp
rax 8 ьходяших в пазы Ч выношенные в п MI ке 7 казанны па :ы Ч выпотнены fio i vi юм к вертика 1ьнои оси корима 1
Ва i 10 с закрещенной на нем шее становленнои внчтри винта II на м|)жнш 12 е возможностью перемещения в ш 1ь прочотьной оси nocneiHero гержи от поворота шпонкой 13 входящей в па i 14 выпотненный в ва ie 10 Кроме тою последний своим коническим концом 15 в аимот.ейетв ет с планкой 7 а также вхо шт в зацеп имше с рейкой 16 (акреп R н ной на корт се I
Винт II имеющий самотормозящ ю peii.6 нахотитея в зацеп iennn с пи но 1ью 17 чстановтенной в карегке 18 е возможностью горизонта тьно: о перемете ния Пос1ет.няя мтанов iena на корпме 1 е во(можностью вертика ьною перемещения по направ яющеи 14
К типовой пор 20 закрои ни на I с возможностью взаимо ЮИ1ТВИЯ с пино 17 На каремке 18 закрепки пани 21 со
сл
оо со со 1
О5
сферической головкой 22, входящей в паз 23, выполненный в рабочей площадке 4
Внутри направляющей 2 смонтирована приводная рейка 24, которая через шестерни 25 и рейки 26 взаимодействует с рабочей площадкой 4
Угол наклона рабочей поверхности клинового упора к вертикали я связан с шагом резьбы винта 1 I H, числом Z и модулем т зубьев вала шестерни 10 соотношением H imZtga
Ловитель для поднимаемого груза работает следующим образом
При нормальной работе грузоподъемного механизма каретка 18 перемещается вместе с рабочей площадкой 4 и грузом 5 При этом шестерня вала 10 обкатывается по рейке 16 и через шпонку 13 приводит во вращение винт I 1 Последний перемещает находящеюся с ним в зацеплении пиноль 17, которая отслеживает форму клинового пора 20, межд ними при этом выдер живается зазор
При аварии грузоподъемного механизма сила тяжести рабочей площадки 4 и груза 5 перестает действовать на направляющую 2 Под ;ействием пружины 3 направляющая 2 перемещается вверх и через систему клиновых толкателей 6 приводит в движение планку 7
Последняя перемещаясь под углом к оси корпуса 1, с шигает вал 10 и выводит шестерню ш ацеп юния с рейкой 16 В то же время рабочая площадка 4 с грузом э, а вместе с ними и каретка 18 с пи но 1ью 17 смещаются вниз to касания пос
0
ледней поверхности клинового упора 20. Таким образом, рабочая площадка 4 с грузом 5 фиксируется
Формула изобретения
Ловитель подъемника, содержащий установленный на грузонесущем органе подъемника корпус, внутри которого смонтирован вал с закрепленной на нем шестерней, находящейся в зацеплении с зубчатой направляющей, и подпружиненную кинематическую связь шестерни с фиксирующим элементом, отличающийся тем, что, с целью повышения надежности, он снабжен привод5 ным узлом, включающим в себя установленные в корпусе с возможностью вертикального перемещения рабочую площадку и каретку с закрепленным на ней пальцем со сферической головкой, входящей в паз, выполненный в рабочей площадке, установленную в каретке с возможностью горизонтального перемещения и взаимодействия с фиксирующим элементом, выполненным в виде клинового упора, пиноль, связанную посредством резьбового соединения с вин
5 том, установленным шарнирно в каретке, и планку, установленную в корпусе с возможностью перемещения под углом к вертикальной оси, при этом внутри винта выполнена полость, в которой смонтирован с во шожностью осевого перемещения у помя- нутый вал, выполненный подпружиненным, один конец вала выполнен коническим и на хо1итея в контакте с планкой, а направ 1яющая подпружинена относительно корпу с а

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ФИКСАЦИИ ШТОКА | 1990 |
|
RU2020546C1 |
| Грузоподъемная площадка крана-штабелера | 1979 |
|
SU918219A1 |
| Грузоподъемная площадка крана-штабелера | 1986 |
|
SU1384503A2 |
| Фиксирующее устройство | 1988 |
|
SU1638381A1 |
| Устройство для перемещения и ориентирования штучных заготовок | 1987 |
|
SU1433588A1 |
| Многопозиционный станок для двусторонней обработки концов трубчатых электронагревателей | 1985 |
|
SU1344518A1 |
| Устройство для сборки и дуговой сварки | 1978 |
|
SU740461A1 |
| Автоматическая транспортная установка для передачи изделий с одного конвейера на другой | 1974 |
|
SU557014A1 |
| Стенд для слесарно-доводочных работ | 1989 |
|
SU1660804A1 |
| Консольно-поворотный кран | 1985 |
|
SU1403549A1 |

Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в качестве предохранительного устройства в грузоподъемных машинах, преимущественно для безударной фиксации грузов в аварийной ситуации. Цель изобретения - повышение надежности работы. Устройство содержит корпус с направляющей, на которой с возможностью вертикального перемещения установлена рабочая площадка. Клиновый упор закреплен на корпусе. Ловитель снабжен механизмом, обеспечивающим перемещение рабочей площадки по мере подъема (опускания) вдоль рабочей поверхности клинового упора. При аварии грузоподъемного механизма направляющая под действием пружины перемещается вверх и через систему клиновых толкателей приводит в движение планку, которая, перемещаясь под углом к оси корпуса, выводит шестерню из зацепления с рейкой. При этом рабочая площадка с грузом смещается вниз и фиксируется клиновым упором. 6 ил.
iO r
CT CO CO Ю
to
to
20
Id 11 К
Фиг. t
Фиг. б
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
