35
«
/)«15
t
1 H- ; м Ц
оо
со СП
оо оо
Изобретение относится к хо.юдкой обработке металлов давлением н может быть использовано для перемещения и ориентирования 1нтучных заготовок.
Целью изобретения является новьпление производительности нроцесса перемещения и ; ориентирования н надежности работы. На фиг. изображено устройство для нере.мешения и ориентирования итучных заготовок; на фиг. 2 - вид А .-la фиг. ; на
фиг. 3 -- вид Б на фиг. 1; на фиг. 4 вмд В
на фиг. 1; на фиг. 5 - сечение ГГ на фиг. 1;
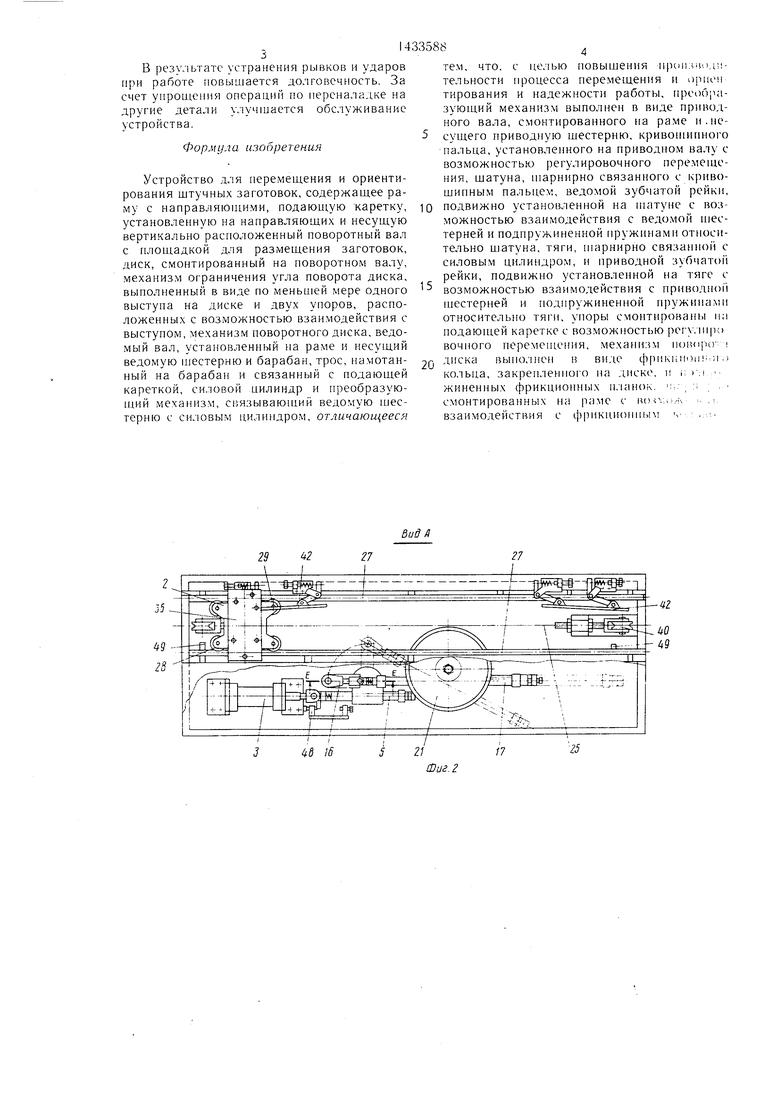
: на фиг. 6 - сечение Д--Д на фиг. 1; на ; фиг. 7 -- сечение Н--Е на фиг. 2. ; Устройство содержит раму 1, подаюн1ую каретку 2, силовой цилиндр 3 со HITOKOM 4, приводную зубчатую рейку 5, палец 6, уста- новлегшый на штоке 4, тягу 7, птрнирно :связанную с пальцем 6. Приводная зубча- ; тая рейка 5 подвижно установлена на тяге 7, i подпружинена относительно нее нружи1;ами is и входит в зацепление с нриводной 1нес- I терней 9. Поеледняя расположена н KOpiiy- ; се 10 и смонтирована на нриводиом ва- i лу П. Вал 11 установлен в корнусе i(i на : подшипниках 12. На валу 11 закреплен кри- : вошйп 13, на котором установлен ползун 14 с ; возможностью регулировочного неремеще- I кия от винта 15. Ползун 14 гларнирно гвя- ; зан с шатуном 16, на котором подвижно уетановлена ведомая зубчатая 17. Нол- ;зун 14 связан с шатуном 16 через криво- ; шинный палец 18. Зубчатая рейка 17 зхо- ;дит.в зацепление с ведомой шестерней 19, I установленной на ведомом валу 20, несущего барабан 21. Зубчатая рейка 17 установлена в корпусе 22, свободно смонтированным па I валу 20 при по.моши подшипников 23. Бара- I бан 21 связан с валом 20 при помощи вин- I та 24. На барабан намотан трос 25 и : закреплеп планками 26. На раме 1 смон- ;тированы направляюпше 27, по которым при помощи роликов 28 и 29 перемещается по- дающая каретка 2. Подающая каретка 2 содержит корпус 30, оси 31 для установки ро- :ликов 28, вал 32, установленный вертикаль- но в корпусе 30 на подщипниках 33. На ва- :лу 32 с.монтированы диск 34 и площадка 35 ic ограничителями 36 для заготовки (не по- указана). В корпусе 30 установлены с возможностью регулировочного перемещения упоры 37, а на диске 34 закреплен высгуп, выполненный в виде упора 38. Трос 25 при помощи зажимов 39 связан с подающей кареткой 2. На раме. установлен блоки 40, через -которые перекинут трос 25.
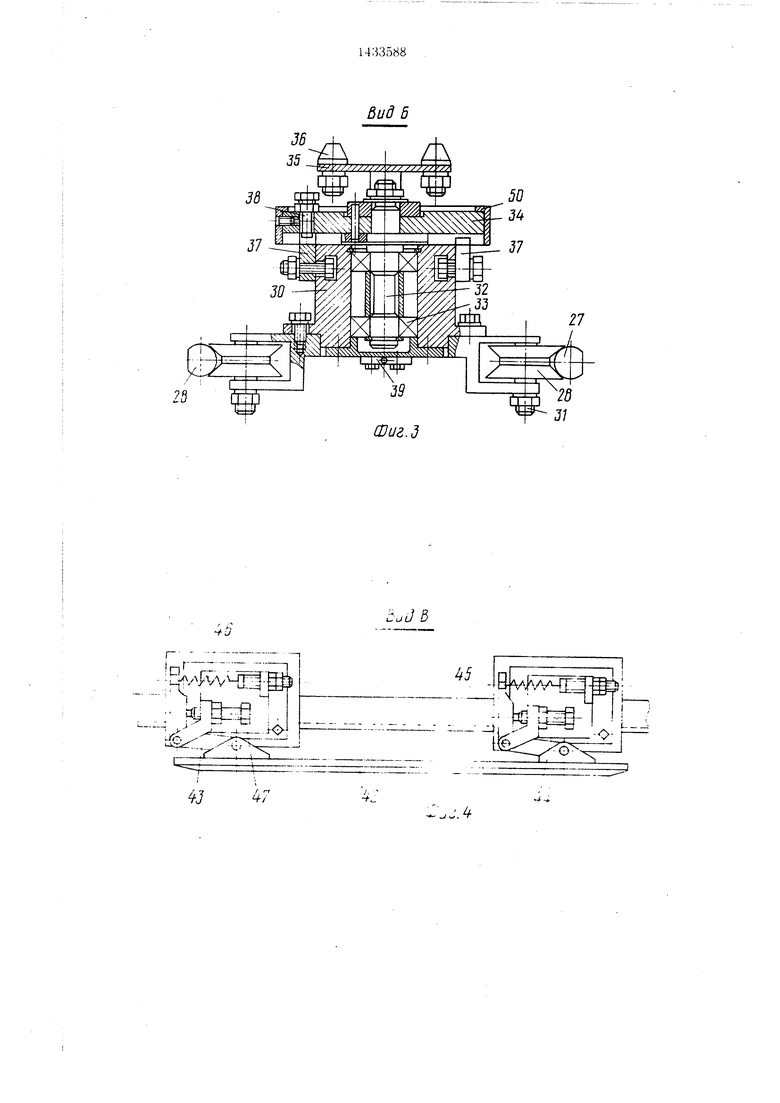
На плите 4 рамы 1 уста110влены фэик- ционные планки 42. Последние шарнирно установлены на двуплечих рычагах 43, которые установлены на кронштейнах 44 при помощи пальцев 45, Рычаги 43 подпружинены пружинами 46 и Е заимодействугОт с регулировочными винтами 47. На ра.ме 1 смонтированы регулируемые по длине упоры 48
5
и датчики 49. На диске 34 закреплено фрикционное кольцо 50.
Устройство работает следующим образом. Отпускают винт 24 и поворото.м барабана 21 устанавливают каретку 2 с заготовкой против захватов робота (не показан). Закрепляют барабан 21 винтом 24. Затем перемещают каретку 2 в другое положение и регулировкой хода штока 4 цилиндра 3 или величиной плеча крив ощипа 13, пере0 мещая ползун 14, устанавливают длину перемещения каретки 2. Затем выставляют датчики 49. Укладывают заготовку в приемное гпездо каретки 2.
Датчики 49 включают электромагнит
пневмораспределителя (не показан) и линдр 3 перемещает обе рейки 5 и 17 с кривошипом 13 в другое положение. Скорость неремец,ения рейки 17 и, соответственно, вращение барабан 21 происходит плавно, нарастая до максимальной величины в центре
0 хода, затем плавно снижается за счет того, что кривошип 13 делает половину оборота с одной мертвой точки в другую. Каретка 2 поэтому плавно трогается с места и плавно останавливается без ударов и рывков. Так как реечные зацепления выполнены безлюф5 товыми, рейки 5 и 17 подпружипены пру- жина.ми, каретка 2 останавливается точно в конечных положениях без дополнительных упоров и демпферов.
Забирают заготовку, датчики 49 дают ко- .манду электромагниту пневмораспределителя и каретка 2 перемещается в исходное положение. Скорость перемещения каретки 2 ре1Л лируется с по.мощью пневмодросселей (не показан).
Ориентация приемной площадки 35 каретки 2 происходит таким образом. Фрикционные планки 42 с помощью регулировочных винтов 47 устанавливают на угол наклона планок 42 и соответственно на длину контакта фрикционных планок 42 с фрикционным кольцом 50 диска 34.
0 При перемещении каретки 2 фрикционное кольцо 50 контактирует с фрикционной планкой 42 и за счет сил трения вращается, поворачивая приемную площадку 35 с заготовкой на необходимый угол. При подходе каретки к другому положению фрикционное
кольцо 50 входит в контакт с другой фрикционной планкой 42, доворачивается до соприкосновения подвижного упора 37 с неподвижным упором 38. Угол поворота диска 34 регулируется передвижением подвижных
упоров 37 в каретке 2.
Предлагаемое устройство обеспечивает транспортировку и ориентацию заготовок .между технологическими машинами с высокой скоростью и точностью позиционирования и позволяет ориентировать детали на
5 . угол. Быстрая переналадка на другую заготовку и простая регулировка позволяет расширить технологические возможности устройства.
0
5
В результате уетранеиия рывков и ударов при работе повышается долговечпоеть. За счет упрощения операции по переналадке на другие детали yлyчпJaeтcя обслуживание устройства.
Формула изобретения
Устройство для перемещения и ориентирования щтучных заготовок, содержащее раму с направля1ОП1ими, подающую каретку, установленную на направляющих и несущую вертикально расположенный поворотный вал с площадкой для размещения заготовок, диск, смонтированный на поворотном валу, механизм ограничения угла поворота диска, выполненный в виде по меньшей мере одного выступа на диске и двух упоров, расположенных с возможностью взаимодействия с выступом, механизм поворотного диска, ведомый вал, установленный на раме и несущий ведомую П1естерню и барабан, трос, намотанный на барабан и связанный с подающей кареткой, силовой цилиндр и преобразую- пдий механизм, связываюпшй ведомую шестерню с силовым цилиндром, отличающееся
тем, что, с целью повышения npcuiivv.i. тельности процесса перемещения п орпоп тирования и надежности работы, преобра- зую1ций механизм выполнен в виде приводного вала, смонтированного на раме и.несущего приводную щестерню, кривон1ипного пальца, установленного на приводном валу с возможностью регулировочного перемещения, шатуна, 1парнирно связанного е кривошипным пальцем, ведомой зубчатой рейки, подвижно установленной на П1атуне с возможностью взаимодействия с ведомой njec- терней и подпружиненной пружинами относительно щатуна, тяги, П1арнирно связанной с силовым цилиндром, и приводной зубчатой рейки, подвижпо установленной на тяге с возможностью взаимодействия с приводной шестерней и подпружиненной пружипамп относительно тяги, упоры смонтированы па подающей каретке с возможностью регулпро вочного перемещения, механизм i диска выполнен п виде фрикипош;и.) ко,1ьца, закрецлеьпюго на дпске, и г. жиненных фрикционных планок, --i,: , : : . смонтированных на раме с .: . - .: взаимодействия с фрикциопп1.м ч , -,.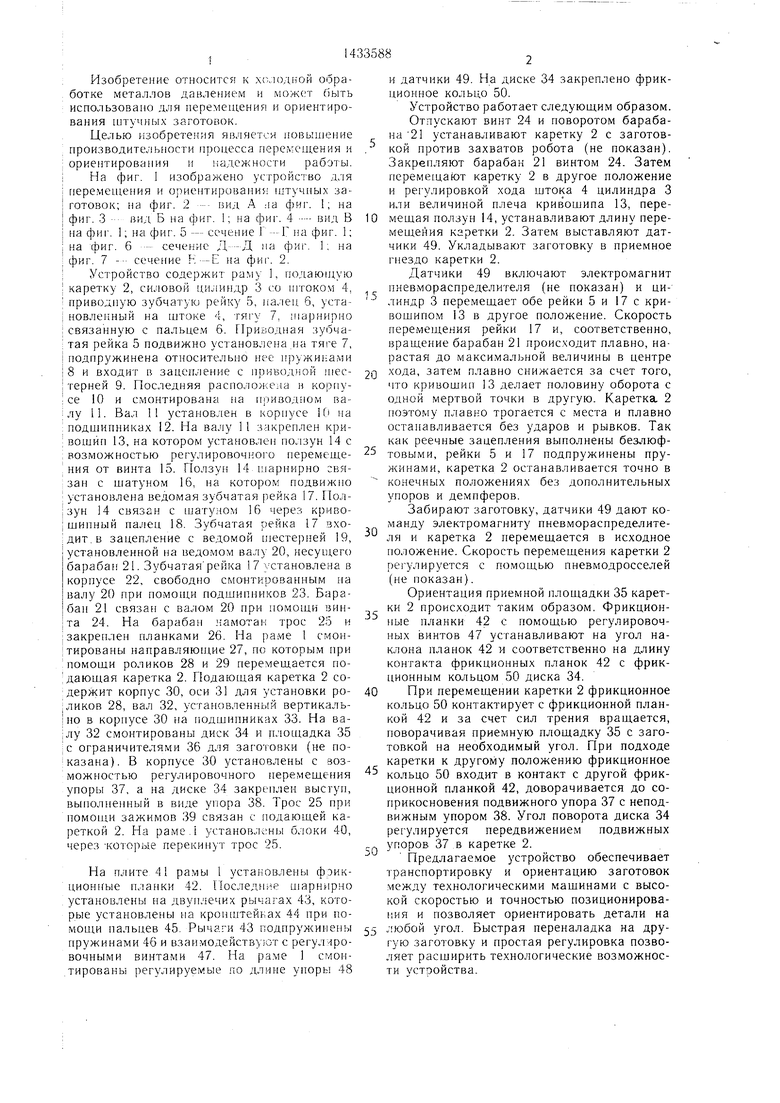
| название | год | авторы | номер документа |
|---|---|---|---|
| Линия для многопереходной штамповки деталей из листового материала | 1987 |
|
SU1433587A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Устройство для подачи материала в рабочую зону пресса | 1987 |
|
SU1488075A1 |
| Устройство для перемещения и контования штучных заготовок | 1987 |
|
SU1479180A1 |
| Устройство для перемещения и ориентирования штучных заготовок | 1984 |
|
SU1224063A1 |
| Устройство для отделения листовых заготовок от стопы | 1980 |
|
SU978987A1 |
| Автоматическое загрузочное устройство | 1984 |
|
SU1220783A1 |
| Устройство для поштучной выдачи выполнен с толкателем для деталей,отличающейся тем,что,с целью расширения технологических возможностей и снижения металлоемкости,механизм поштучной | 1984 |
|
SU1292882A1 |
| Устройство для подачи полосового материала в рабочую зону пресса | 1980 |
|
SU869919A1 |
| Устройство для перемещения штучных заготовок типа тел вращения | 1988 |
|
SU1516197A1 |

Изобретение относится к обработке металлов давлением, в частности к устройствам для перемещения и ориентирования Н1тучных заготовок. Целью изобретения является новышение производительности процесса перемещения и ориентирования и надежности работы. Заготовки перемешаются и ориентируются площадкой 35, подвижной в горизонтальном направлении и поворотной вокруг вертикальной оси. Площадка закреплена на вертикальном валу, установленном в подающей каретке 2. Поворот вертикального (поворотного) вала осуществляется при взаимодействии фрикционного кольца с подпружиненными фрикционными планками 42, и арнирно закрепленными на раме. Поворот вертикального вала с площадкой ограничивается механизмом ограничения поворота. Механизм ограничения поворота содержит выступ, расположенный на диске, и упоры, установленные на подающей каретке с возможностью регулировочного перемещения и взаи.модействия с выступо1М. Подающая каретка приводится в движение тросом, намотанным на барабан 21. Барабан установлен на ведомом валу, несущем ведомую щестер- ню. Ведомая щестерня через преобразующий механизм связана с силовым цилиндром 3. Устройство обеспечивает транспортировку и ориентацию заготовок между технологическими машинами с высокой скоростью и точностью позиционирования, позволяет ориентировать детали под любой yro.i 7 ил.
J5
27
21
7
25
3d
г
IP, г™ г 1 i
:,
Ф tps
--1 Jl.--....tO
J
47
Вид 5
t- u
i}b
ч5
7
Фиг. 7
| Устройство для перемещения и ориентирования штучных заготовок | 1984 |
|
SU1224063A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
