гч
25
Изобретение относится к оборудованию складов, в частности к грузоподъемным площадкам кранов-штабелеров, и является дополнительным к авт. св. с № 916219,
Целью изобретения является улучшение эксплуатационных характеристик путем обеспечения захвата поддонов
без продольных захватных пазов. 10
I
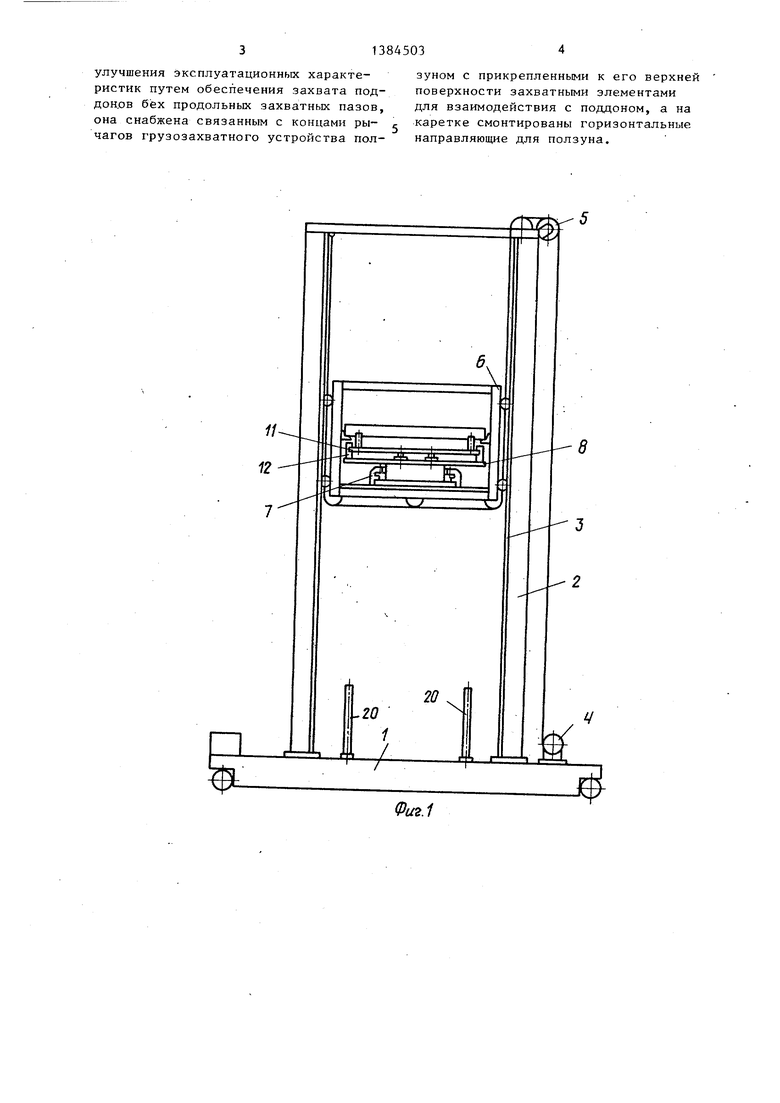
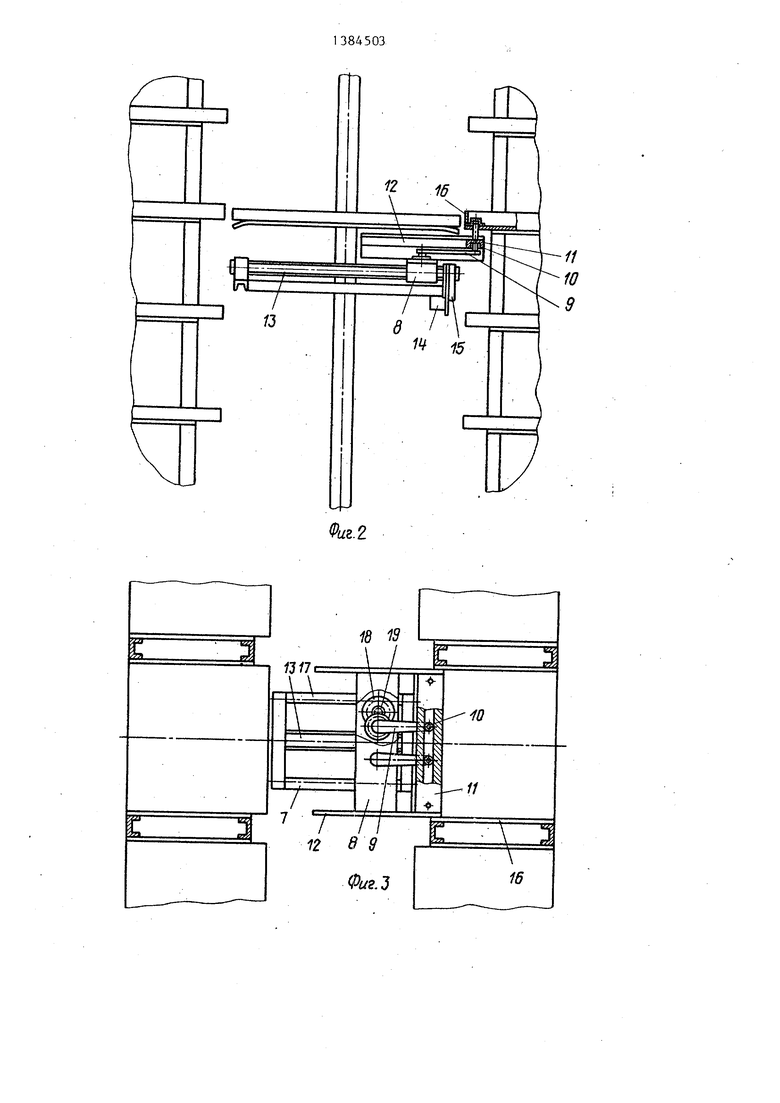
На фиг,1 изображен кран-штабелер с грузоподъемной площадкой, общий вид; на фиг.2 - грузоподъемная площадка, вид сбоку; на фиг.З и 4 - гру- 5 зозахватное устройство в работе,
Кран-штабелер, обслуживающий многоярусные стеллажи и входящий в состав склада, содержит тележку 1, На тележке 1 жестко установлена рама 2, 20 к которой прикреплены вертикальные направляющие 3, по которым при помощи привода 4 подъема и системы блоков 5 может перемещаться грузоподъемная площадка, 6. На площадке 6 смонтированы горизонтальные направляющие 7, расположенные перпендикулярно движению крана-штабелера, в которых установлено с возможностью перемещения
чп
по ним грузозахватное устройство. -
Грузозахватное устройство выполнено в виде подвижной каретки 8 с установленными на ней двумя поворотно-подвижными рычагами 9 с роликом 10 на конце каждого. Ролики 10 подвижно 35 установлены в пазу захвата 11, который может перемещаться по дополни- тельньм направляющим 12, закрепленным на каретке 8. Каретка 8 приводится в движение при помощи ходового 40 винта 13, электродвигателя 14 и редуктора Т5. Захват 11 в крайнем положении каретки 8 выходит за габариты грузоподъемной площадки 6 в сторону стеллажей и обеспечивает зацепление 45 поддона 16.
С Горизонтальными направляющими 7 грузоподъемной площадки 6 за одно целое выполнены зубчатые рейки 17, кинематически связанные через блоч- Q ные шестерни 18 и ведомые шестерни 19 с поворотно-подвижными рычагами 9. Д.ЧЛ освобождения каретки 8 от поддо- 16 в нижней части рамы 2 на тележке 1 крана-штабелера имеются упоры 20.
Кран-щтабелер |)аботает следующим образом.
При цикле взять груз (фиг.З) кран- штабелер с грузоподъемной площадкой
5
0
5
0
п
5 0 5
Q
6 перемещается к заданной ячейке. Для того, чтобы зацепить поддон 16, включают электродвигатель 14, и каретка 8 выдвигается по ходовому винту 13 в крайнее положение-. При этом блочные шестерни 18, обкатываясь по зубчатым рейкам 17, вращают ведомые шестерни 19. Рычаги 9, закрепленные на валу каждой из щестерен 16, совершают сложное движение: поступательное вместе с кареткой 8 от ходового винта 13 и вращательное вокруг своей оси, В результате ролики 10 рычагов 9, перемещаясь в пазу захвата 11, приводят его в поступательное движение по направляющим 12 и он оказывается под захватными элементами поддона 16, например отверстиями.
При вертикальном перемещении грузоподъемной площадки 6 вверх захват 11 захватывает поддон 16. Включают электродвигатель 14, и каретка 8 перемещается по ходовому винту 13 в обратном направлении, вытаскивая поддон 16 из ячейки.
Для извлечения поддона 16 из ячейки стеллажа и дальнейшей его транспортировки к месту разгрузки каретку 8 останавливают в промежуточном положении (фиг.4). Величина перемещения поддона 16 при полном ходе каретки 8 равна величине хода каретки 8 плюс две длины рычага 9 (при полном ходе каретки рычаги поворачиваются на 180°).
Извлечение поддона из левого стеллажа производится аналогичным образом.
При необходимости переставить ni .4- дон с одной стороны стеллажей (с правого стеллажа в левый) на другую грузоподъемную площадку 6 с извлеченным из стеллажа поддоном 16 опускают в нижнее положение. В этом положении поддон 16 опирается на специальные упоры 20. Каретка 8 с захватом 11, находясь ниже поддона 16, перемещается под поддоном в крайнее правое положение, а захват 11, упираясь в правый край вытащенного поддона, перемещает поддон в левый стеллаж посредством перемещения каретки 8 влево.
Формула изобретения
Грузоподъемная площадка крана-штабелера по авт.св. № 918219, о т л и - чающаяся тем, что, с целью
улучшения эксплуатационных характеристик путем обеспечения захвата под- ДОН.ОВ бёх продольных захватных пазов, она снабжена связанным с концами ры чагов грузозахватного устройства ползуном с прикрепленными к его верхней поверхности захватными элементами для взаимодействия с поддоном, а на каретке смонтированы горизонтальные направляющие для ползуна.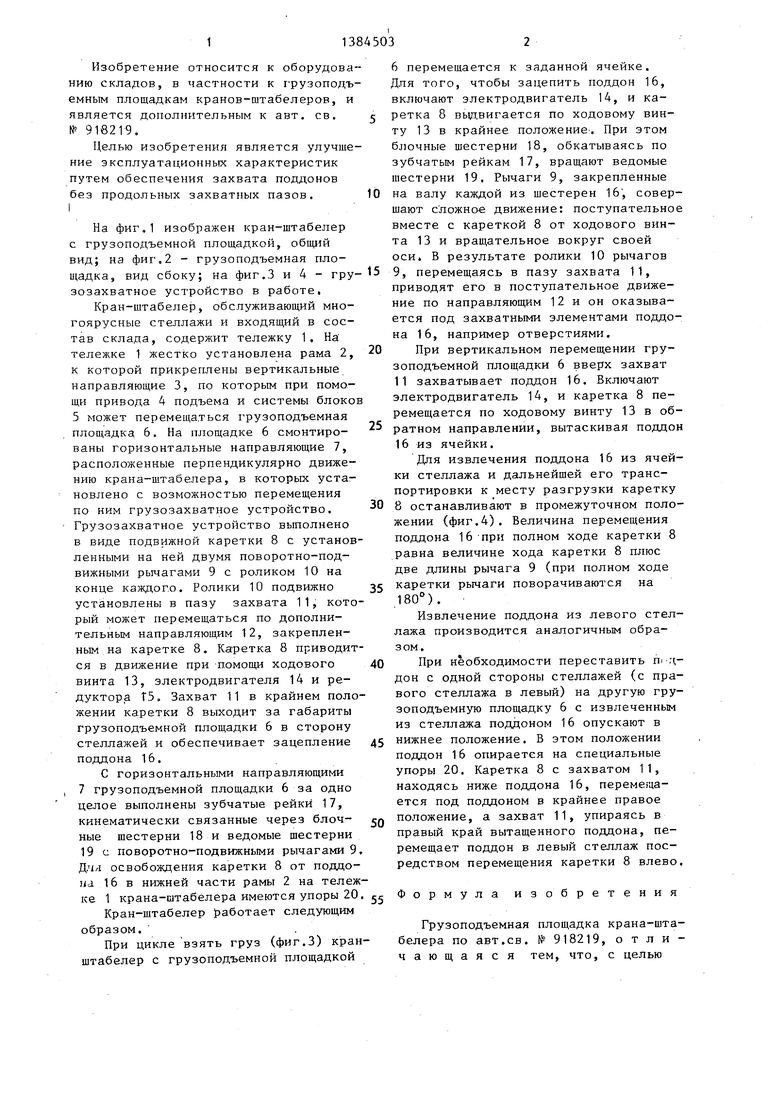
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемная площадка крана-штабелера | 1979 |
|
SU918219A1 |
| Грузоподъемная площадка крана- шТАбЕлЕРА | 1978 |
|
SU796128A1 |
| Грузоподъемная площадка крана-штабелера | 1988 |
|
SU1569289A1 |
| Грузоподъемная площадка крана-штабелера | 1985 |
|
SU1283199A1 |
| Грузоподъемная площадка крана-штабелера | 1978 |
|
SU887389A1 |
| Грузоподъемная площадка крана- штабелера | 1978 |
|
SU740660A1 |
| Грузоподъемная площадка крана-штабелера | 1981 |
|
SU1014788A1 |
| Грузозахватное устройство стеллажного крана-штабелера | 1990 |
|
SU1773813A1 |
| Грузоподъемная площадка крана-штабелера | 1980 |
|
SU981126A1 |
| Гибкий производственный комплекс | 1985 |
|
SU1349970A1 |
Изобретение относится к оборудованию складов. Цель изобретения - улучшение эксплуата1Д1онных характеристик путем обеспечения захвата поддонов без продольных захватных пазов. Площадка содержит грузозахватное устройство, выполненное в виде каретки, которая при включении привода, посредством ходового, винта перемещается по горизонтальным направляющим, расположеннь1м на площадке перпендикулярно движению крана-штабелера. При перемещении каретки установленные на ней блочные шестерни, обкатываясь по зубчатым рейкам, выполненным за одно целое с направляющими, вращают ведомые шестерни, смон тированные на каретке. Рычаги, закрепленные на валу каждой из шестерен, совершают сложное движение: поступательное вместе с кареткой и вращательное вокруг своей оси. В результате этого ролики рычагов, перемещаясь в пазу захвата, приводят его в поступательное движение по направляющим, закрепленным на каретке, и оказываются под захватываемыми элементами поддона. Введение в конструкцию грузозахватного устройства захвата и направляющих позволяет отказаться от металлоемких захватных пазов с поверхностями дона и использовать в качестве захватываемых элементов, например, отверстия. При вертикальном перемещении площадки вверх захват захватывает поддон. При включении привода каретка перемещается по ходовому винту в обратном направлении, вытаскивая поддон из ячейки. 4 ил из (Л 00 а 4 СП О со
Фиг.2
18 19
/ Е
J
| Грузоподъемная площадка крана-штабелера | 1979 |
|
SU918219A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
