Изобретение относится к машиностроению, в частности к средствам гидроавтоматики, и может быть использовано в блокирующих устройствах промышленных роботов, где требуется быстрое и точное позиционирование нагруженных исполнительных рабочих органов в лю- бом положении. .
Цель изобретения - повышение точности позиционирования путем обеспечения оптимального по быстродействию закона торможения.
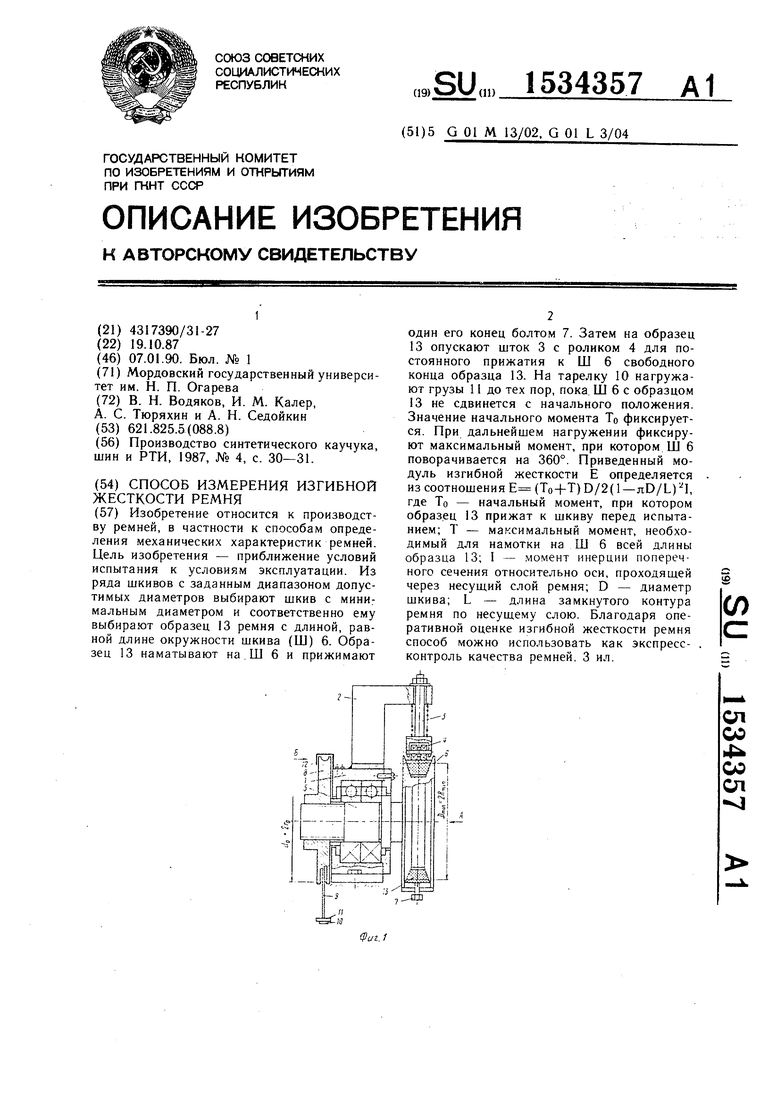
На фиг.1 представлена принципиальная пневмоэлектрическая схема привода; на фиг. 2 - осцилограммы напряжений и скорости штока.
Позиционный пневмопривод (фиг. 1) содержит пневмоцилиндр 1, установленный в нем с образованием рабочих полостей 2 и 3 поршень 4 со штоком 5, тормозное устройство, выполненное в виде пьезокерамического преобразовате ля 6, внешний электрод 7 которого заземлен, а внутренний электрод 8 разделен на три симметричные кольца 9-11 два из которых подключены к двухполяр но му источнику 12 питания, а третье - к генератору 13 высокочастотных ко- , лебаний через коммутирующее устройство 14, связанное с блоком 15 управления. Для уменьшения износа пьезокерамического преобразователя 6 в зоне контакта с пневмоцилиндром 1 на нем прикреплено металлическое кольцо 16.
Пневмопривод работает следующим образом.
При подаче рабочей среды под дав- лением в одну из рабочих полостей 2 или 3 шток 5 остается неподвижным, поскольку сила трения между поршнем 4 и пневмоцилиндром 1 больше силы, развиваемой поршнем 4 под действием перепада давлений в рабочих полостях 2 и 3. Величина силы трения между пневмоцилиндром 1 и металлическим кольцом 16 регулируется путем изменения напряжения на выходе источника 12 питания. Величина напряжения подбирает блок 15 управления в зависимости от нагрузки на штоке 5, при котором он остается неподвижным при подаче заданного давления рабочей среды в одну из полостей 2 или 3. Это достигается следующим образом. При подаче напряжения из источника 12 на кольца 9 и 10 электрода 8 часть преобразователя 6 под кольцом 9 сжимается, а под кольцом 10 расширяется. Таким образом, создается требуемый натяг, а следовательно, и сила трения между иневмоцилиндром 1 и металлическим кольцом 16.
Для получения перемещения штока 5 на заданную величину из блока 15 на рКОммутирующее устройство 14 подается управляющий сигнал в виде прямоугольного импульса U} определенной продолжительности по времени. Под действием управляющего импульса коммутирующее устройство 14 пропускает на кольцо 11 пакет высокочастотных электрических колебаний, продолжительность которого зависит от управляющего импульса. Под действием колебаний пьезокерамического преобразователя 6 в зоне контакта металлического кольца 16 и иневмоцилиндра уменьшается сила трения и шток 5 начинает перемещаться . При отсутствии управляющего импульса Uч на коммутирующее устройство 14 шток 5 вновь неподвижен. Таким образом, можно получить перемещения штока 5 с шагом до 0,001 мм, так как при снятии высокочастотных колебаний время торможения составляет миллисекунды.
Формула изобретения
Позиционный пневмопривод, содержащий пневмоцилиндр, установленный в нем с образованием рабочих полостей Ъоршень со штоком, электроуправляе- мое тормозное устройство, подключенное к блоку управления и установленное в поршне с возможностью взаимодействия с пневмоцилиндром, о т л и- чающийся тем, что, с целью повышения точности позиционирования путем обеспечения оптимального по быстродействию закона торможения, тормозное устройство выполнено в виде пьезокерамического преобразователя с радиальной поляризацией, внешний относительно поршня электрод которого заземлен, а внутренний электрод разделен на три симметричных кольца, два из
которых подключены к двухполярному источнику питания, а третье - к генератору высокочастотных колебаний через коммутирующее устройство, связанное с блоком управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный пневматический привод | 2018 |
|
RU2689662C1 |
| Позиционный пневмопривод | 1989 |
|
SU1642100A1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД | 2009 |
|
RU2450174C2 |
| Позиционный пневмопривод | 1986 |
|
SU1359503A1 |
| Позиционный пневмоцилиндр | 1989 |
|
SU1707295A1 |
| Устройство управления пневматическим приводом вагонного замедлителя | 2017 |
|
RU2689468C2 |
| Способ управления позиционным пневмоприводом и позиционный пневмопривод для его осуществления | 1988 |
|
SU1596143A1 |
| Позиционный пневматический привод | 1988 |
|
SU1508015A1 |
| Позиционный пневмопривод | 1986 |
|
SU1418511A1 |
| Пневмопривод вагонного замедлителя | 1990 |
|
SU1729873A1 |
Изобретение относится к позиционным пневмоприводам и может быть использовано в блокирующих устройствах промышленных роботов. Цель изобретения - повышение точности позиционирования путем обеспечения оптимального по быстродействию закона торможения. В начале подается рабочая среда под давлением в одну из полостей 2 или 3, подбирается напряжение питания колец 9, 10 путем подачи управляющего сигнала из блока 15 на источник 12, при котором шток 5 неподвижен. Далее для получения перемещения штока 5 подается прямоугольный импульс на коммутирующее устройство 14, которое пропускает пакет высокочастотных электрических колебаний на кольцо 11. Сила трения между металлическим кольцом 16 и пневмоцилиндром уменьшается, и поршень 4 со штоком 5 перемещается до тех пор, пока на кольцо 11 поступают высокочастотные колебания. Таким образом достигается перемещение с шагом до 0,001 мм. 2 ил.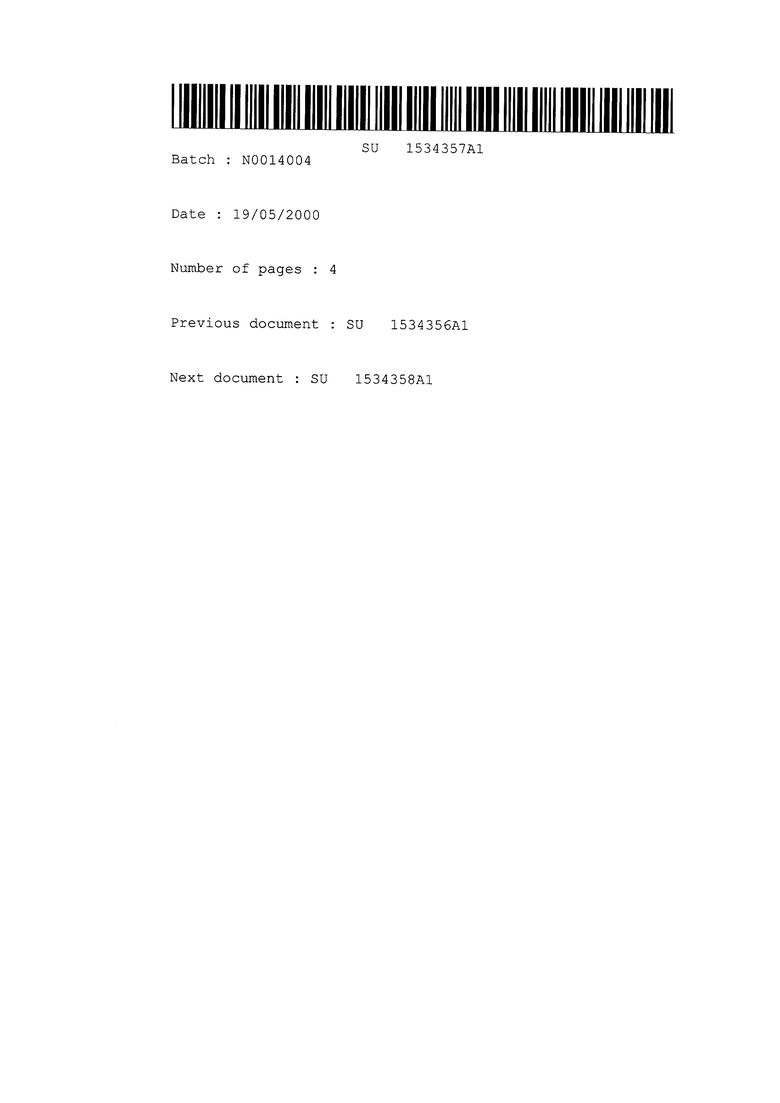
dxldt (dxldtimax
г
Щи г. 2
