Ё
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный пневматический привод | 1988 |
|
SU1536090A1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД | 1992 |
|
RU2041405C1 |
| Пневмоцилиндр | 1985 |
|
SU1375868A1 |
| Модуль манипулятора | 1991 |
|
SU1776556A1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД | 2009 |
|
RU2450174C2 |
| Позиционный пневматический привод | 1988 |
|
SU1508015A1 |
| УСТРОЙСТВО СНАРЯЖЕНИЯ ТЕПЛОВЫДЕЛЯЮЩЕГО ЭЛЕМЕНТА | 2019 |
|
RU2713220C1 |
| Пневмоцилиндр с линейным тормозным устройством | 1989 |
|
SU1795156A1 |
| ПОЗИЦИОННЫЙ ПНЕВМОГИДРАВЛИЧЕСКИЙ ПРИВОД | 1993 |
|
RU2074329C1 |
| ПОЗИЦИОННЫЙ ПНЕВМОГИДРАВЛИЧЕСКИЙ ПРИВОД | 1993 |
|
RU2065092C1 |
Изобретение относится к машиностроению и может быть использовано в промышленных работах и автооператорах. Цель изобретения - уменьшение габаритов, увеличение плавности хода и точности позиционирования. Пневмоцилиндр 1 содержит пакет линейных пластин 3-7 фрикционного тормозного устройства 2, которые расположены в полых штоке 8 и гильзе 10 и через пробки 11, 12 связаны с последними. В качестве сервопривода устройства 2 использованы замкнутые оболочкч 15, 16, электромагнит 19, который установлен в пазах 17. Внутри штока 8 и гильзы 10 расположен датчик обратной связи по положению, выполненный ь виде катушки 28 индуктивности и чередования выступов 29 и впадин 30 в гильзе 10. Точность предлагремого пневмоцилиндра порядка 0,05-0,2 мм. 4 э.п. ф-лы, 2 ил. /
Изобретение относится к машиностроению, в частности к пневмоприводам средств автоматизации и механизации, и может быть использовано в промышленных работах и автооператорах.
Цель изобретения - уменьшение габаритов, увеличение плавности хода и точности позиционирования.
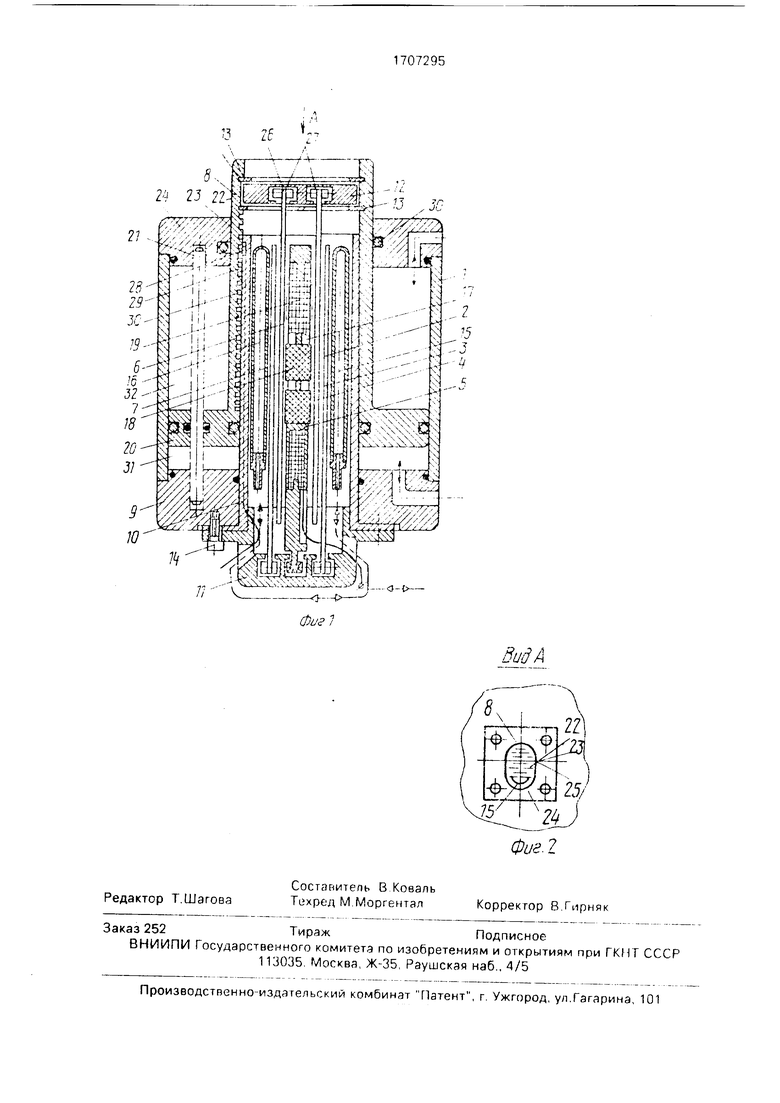
На фиг. 1 представлена принципиальная схема пневмоцилиндра; на фиг.1 вид по стрелке А на фиг.2.
Позиционный пневмоцилиндр содержит силовой пневмоцилиндр 1, фрикционное тормозное устройство 2, имеющее пакет линейных пластин 3-7, связанных со штоком 8 и корпусом 9 пневмоцилиндра 1. Пластины 3-7 расположены в полых штоке 8 и гильзе 10, связанной с корпусом 9, а через пробки 11. 12 разрезными шайбами 13 и винтами 14 (на чертеже показан один
винт) скреплены со штоком 3 и корпусом 9. Сервопривод фрикционного устройства 2 может быть выполнен в виде двух замкнутых оболочек 15, 16, установленных между внутренней поверхностью полой гильзы 10 и пакетом пластин 3-7 с возможностью взаимодействия с ними. Кроме того, в продольных пазах 17 пластин 3-7 могут быть установлены фрикционные прокладки 18 или электромагнит 19 (постоянного тока, или катушка с якорем переменного тока, или хатушка с якорем). Поворот поршня 20 относительно оси предотвращается штангой 21 или выполнением (без штанги) поперечных сечений 22 штока 8 и отверстия 23 в крышке 24 в виде сопряженных деформированных окружностей 25, например в виде эллипсов. Т-образные концы 26 пластин 3-7 вставлены Т-образные отверстия 27 в пробках 11, 12. Внутри полого штока 8 и полой гильзы
J
О
s|
ю ю ел
10 установлен датчик обратной связи по положению, выполненный в виде катушки 28 индуктивности и чередования выступов 29 и впадин 30 в гильзе 10. Поршень 20 со штоком 8 установлены в пневмоцилиндре 1 с образованием рабочих полостей 31, 32.
Позиционный пневмоцилиндр работает следукж1им образом.
В одну из полостей например в полость 31, подается рабочая среда, при этом полость 32 сообщается с атмосферой. Под действием перепада давления поршень 20 со штоком 8 перемещается вверх по чертежу, преодолевая нагрузку (на чертеже не показана). Рабочая среда в оболочки 15, 16 не подается и пластины 3-7 свободно проскальзывают друг относительно друга при незначительной силе трения. При достижении штоком 8 заданной координаты по сигналу с датчика обратной связи по положению система управления (на чертеже не показана) подает рабочую среду в оболочки 15, 16. Вследствие этого пакет пластин 3-7 сжимается, а сила трения между последними возрастает, при этом шток 8 останавливается. Во время торможения подается также напряжение на электромагнит 19, который притягивает к себе соседние пластины б, 7, дополнительно увеличивая силу трения между ними. В случае применения магнитострикционного привода нет необходимости использования оболочек 15, 16, при этом пластины 3-7 не сжимаются в пакет, а расширяются от пластины 5 к полой гильзе 10, После технологической паузы оболочки 15, 16 сообщаются с атмосферой и шток 8 перемещается в другую координату (по программе), в которой вновь останавливается тормозным устройством 2. При смене изношенных пластин 3-7 они с пробками 11, 12 выдвигаются из штока 8, гильзы 10 заменяются, а пробки 11, 12 с новыми пластинами 3-7 вновь вдвигаются в полый шток 8 и гильзу 10 и крепятся винтами 14 и кольцами 13. Рабочая среда в оболочки может подаваться через пневмогидромультипли- катор.
Предложенный пневмоцилиндр ком- пактен, имеет высокую плавность хода и точность позиционирования, требует меньшее время для смены изношенных пластин 3-7. Плавность хода и высокая точность позиционирования обусловлены соосностью силы торможения и движущей силы.
Формула изобретения
фрикционное тормозное устройство, имеющее сервопривод и пакет линейных пластин с продольными пазами, связанных со штоком и корпусом пневмоцилиндра, отличающийся тем, что, с целью уменьшения
габаритов, увеличения плавности хода и точности позиционирования, шток пневмоцилиндра выполнен полым и снабжен полой гильзой жестко связанной с корпусом и расположенной в расточке штока, при этом пластины размещены в полых штоке и гильзе и связаны с последними.
К
и
с
L4
Вид А
| Пневмоцилиндр | 1985 |
|
SU1375868A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
