я
Ui1
ж«
рования, а также охладить фрикционное тормочное устройство 10, что
улучшает эксплуатационные характеристики привода в целом. 1 з.п.ф-лы,3 ил,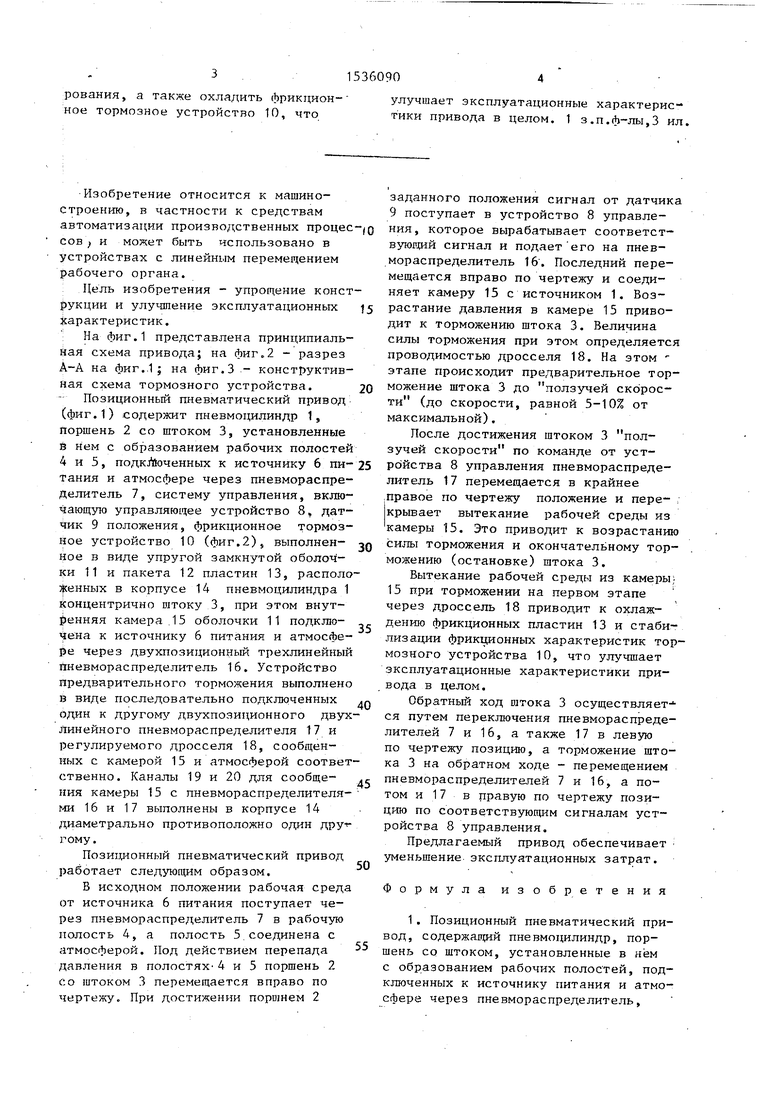
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмогидравлический привод | 1989 |
|
SU1649127A1 |
| Позиционный пневмопривод | 1989 |
|
SU1642100A1 |
| Пневматический привод | 1988 |
|
SU1596142A1 |
| Пневмопривод | 1988 |
|
SU1583670A1 |
| Комбинированный тормозной пневмопривод тягача | 1985 |
|
SU1281460A1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД | 1992 |
|
RU2041405C1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД | 2009 |
|
RU2450174C2 |
| Устройство управления предохранительным тормозом подъемной машины | 1984 |
|
SU1549891A2 |
| Пневмонасос | 1990 |
|
SU1753026A1 |
| Реверсивный позиционный пневмогидропривод перемещения инерционных объектов | 1975 |
|
SU532507A1 |
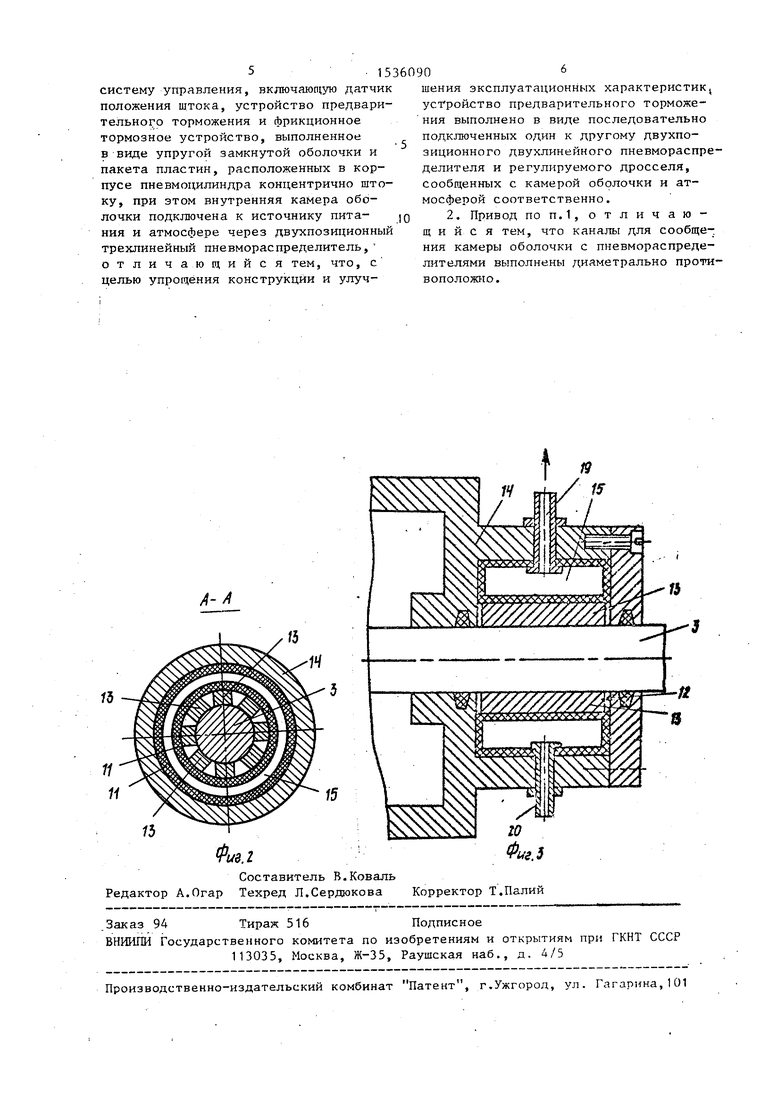
Изобретение предназначено для робототехники. Цель изобретения - упрощение конструкции и улучшение эксплуатационных характеристик. Позиционный пневматический привод содержит пневмоцилиндр 1, поршень 2 со штоком 3, установленные в нем с образованием рабочих полостей 4 и 5, систему управления, включающую управляющее устройство 8, датчик 9 положения и фрикционное тормозное устройство 10, выполненное в виде упругой замкнутой оболочки и пакета пластин, расположенных концентрично штоку 3. Внутренняя камера оболочки подключена к источнику 6 питания и атмосфере через пневмораспределитель 16, а также через пневмораспределитель 17 и регулируемый дроссель 18 к атмосфере. Подключением камеры оболочки к источнику 6 питания при одновременном сбросе рабочей среды в атмосферу через дроссель 18 обеспечивается предварительное торможение штока 3. При позиционировании штока 3 камера оболочки сообщается только с источником 6 питания через пневмораспределитель 16. Выполнение устройства предварительного торможения в виде последовательно подключенных один к другому двухпозиционного и регулируемого дросселей позволяет простыми средствами уменьшить скорость перемещения штока 3 при подходе к точке позиционирования, а также охладить фрикционное тормозное устройство 10, что улучшает эксплуатационные характеристики привода в целом. 1 з.п. ф-лы, 3 ил.
Изобретение относится к машиностроению, в частности к средствам автоматизации производственных процессов ) и может быть использовано в устройствах с линейным перемещением рабочего органа.
Цель изобретения - упрощение конструкции и улучшение эксплуатационных характеристик.
На фиг.1 представлена принципиальная схема привода; на фиг.2 - разрез А-А на фиг.1; на фиг.З - конструктивная схема тормозного устройства.
Позиционный пневматический привод (фиг.1) содержит пневмоцилиндр 1, поршень 2 со штоком 3, установленные в нем с образованием рабочих полостей 4 и 5, подключенных к источнику 6 питания и атмосфере через пневмораспре- делитель 7, систему управления, включающую управляющее устройство 8. датчик 9 положения, фрикционное тормозное УСТРОЙСТВО 10 (фИГ.2), ВЫПОЛНеН-
ное в виде упругой замкнутой оболочки 1 1 и пакета 12 пластин 13, расположенных в корпусе 14 пневмоцилиндра 1 концентрично штоку 3, при этом внутренняя камера 15 оболочки 11 подклю- чена к источнику 6 питания и атмосфере через двухпозиционный трехлинейный пневмораспределитель 16. Устройство предварительного торможения выполнено в виде последовательно подключенных один к другому двухпозиционного двухлинейного пневмораспределителя 17 и регулируемого дросселя 18, сообщенных с камерой 15 и атмосферой соответственно. Каналы 19 и 20 для сообще- ния камеры 15 с пневмораспределителя- ми 16 и 17 выполнены в корпусе 14 диаметрально противоположно один дру тому.
Позиционный пневматический привод работает следующим образом.
В исходном положении рабочая среда от источника 6 питания поступает через пневмораспределитель 7 в рабочую полость 4, а полость 5 соединена с атмосферой. Под действием перепада давления в полостях-4 и 5 поршень 2 со штоком 3 перемещается вправо по чертежу. При достижении поршнем 2
Q
Q
0
заданного положения сигнал от датчика 9 поступает в устройство 8 управления, которое вырабатывает соответствующий сигнал и подает его на пневмораспределитель 16. Последний перемещается вправо по чертежу и соединяет камеру 15 с источником 1. Возрастание давления в камере 15 приводит к торможению штока 3. Величина силы торможения при этом определяется проводимостью дросселя 18. На этом - этапе происходит предварительное торможение штока 3 до ползучей скорости (до скорости, равной 5-10% от максимальной).
После достижения штоком 3 ползучей скорости по команде от устройства 8 управления пневмораспределитель 17 перемещается в крайнее правое по чертежу положение и пере- крывает вытекание рабочей среды из камеры 15. Это приводит к возрастанию силы торможения и окончательному торможению (остановке) штока 3.
Вытекание рабочей среды из камеры 15 при торможении на первом этапе через дроссель 18 приводит к охлаждению фрикционных пластин 13 и стабилизации фрикционных характеристик тормозного устройства 10, что улучшает эксплуатационные характеристики привода в целом.
Обратный ход штока 3 осуществляет-1- ся путем переключения пневмораспреде- лителей 7 и 16, а также 17 в левую по чертежу позицию, а торможение штока 3 на обратном ходе - перемещением пневмораспределителей 7 и 16, а потом и 17 в правую по чертежу позицию по соответствующим сигналам устройства 8 управления.
Предлагаемый привод обеспечивает уменьшение эксплуатационных затрат.
Формула изобретения
515360
систему управления, включающую датчик положения штока, устройство предварительного торможения и фрикционное тормозное устройство, выполненное в виде упругой замкнутой оболочки и
5
пакета пластин, расположенных в корпусе пневмоцилиндра концентрично штоку, при этом внутренняя камера оболочки подключена к источнику пита- JQ ния и атмосфере через двухпозиционный трехлинейный пневмораспределитель, отличающийся тем, что, с целью упрощения конструкции и улучА-А
11
11
60
5
Q
906
шения эксплуатационных характеристик, устройство предварительного торможения выполнено в виде последовательно подключенных один к другому двухпо- зиционного двухлинейного пневмораспре- делителя и регулируемого дросселя, сообщенных с камерой оболочки и атмосферой соответственно.
