Изобретение относится к пневмоавтоматике и может быть использовано в конструкциях станков и промышленных роботов.
Известен пневматический позиционный привод, содержащий пневмоцилиндр, установленный на основании, и связанный со штоком пневмоцилиндра тормозной пассивный гидроцилиндр, полости которого соединены между собой через дроссель.
Техническими недостатками этого привода являются низкое быстродействие и большие продольные габариты.
Из известных устройств наиболее близким по совокупности признаков является пневматический позиционный привод, содержащий силовой пневмоцилиндр, установленный на основании, два тормозных устройства фрикционного типа для взаимодействия с линейками тормозных устройств, соединенными со штоком пневмоцилиндра, микроЭВМ, подключенную к двухпозиционным электромагнитным клапанам, связанным с полостями тормозных устройств и полостями пневмоцилиндра, а также датчик обратной связи и тормозной пассивный гидроцилиндр, полости которого соединены между собой через дроссель, а поршень подпружинен с двух сторон пружинами, размещенными в его полостях.
Техническими недостатками этого привода являются низкая точность перехода при изменении координат и низкое быстродействие.
Технической задачей изобретения является создание пневматического позиционного привода с повышенными точностью и быстродействием при одновременном уменьшении габаритов.
Сущность изобретения заключается в том, что в пневматическом позиционном приводе, содержащем силовой пневмоцилиндр, установленный на основании, два тормозных устройства фрикционного типа для взаимодействия с линейками тормозных устройств, соединенными со штоком пневмоцилиндра, микроЭВМ, подключенную к двухпозиционным электромагнитным клапанам, связанным с полостями тормозных устройств и полостями пневмоцилиндра, а также датчик обратной связи и тормозной пассивный гидроцилиндр, полости которого соединены между собой через дроссель, а поршень подпружинен с двух сторон пружинами, размещенными в его полостях, шток указанного гидроцилиндра размещен между одним из тормозных устройств и соответствующей линейкой, снабженной роликами качения, оси которых неподвижно закреплены на основании, а корпус гидроцилиндра снабжен роликовыми опорами и установлен с возможностью поперечного перемещения в направлении сжимающего усилия от фрикционного тормозного устройства.
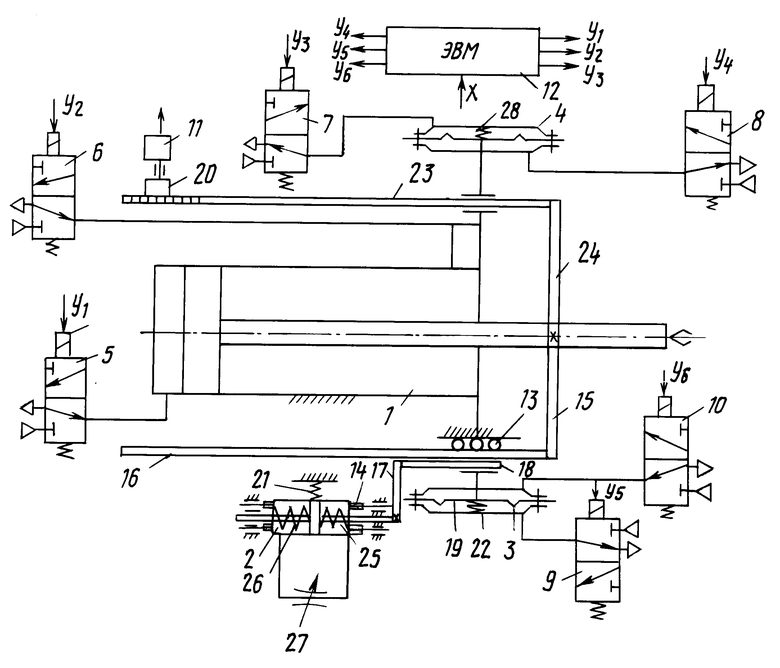
На чертеже изображена принципиальная схема пневматического позиционного привода. Привод содержит силовой пневмоцилиндр 1, тормозной пассивный гидроцилиндр 2, тормозные устройства 3, 4 фрикционного типа, корпуса которых (не обозначено) связаны через основание (не изображено) с корпусом пневмоцилиндра 1, двухпозиционные электромагнитные клапаны 5, 6, 7, 8, 9, 10, датчик 11 обратный связи, управляющую микроЭВМ 12, ролики 13 качения линейки 16 и роликовые опоры 14 гидроцилиндра 2. Шток силового пневмоцилиндра 1 связан серьгой 15 с подвижной линейкой 16, а шток гидроцилиндра 2 связан серьгой 17 с линейкой 18 предварительного тормозного устройства 3, рабочим элементом которого является мембрана 19. Линейка 16 соприкасается с роликами 13 качения. Гидроцилиндр 2 снабжен роликовыми опорами 14 и установлен в неподвижном корпусе, при этом гидроцилиндр 2 неподвижен в направлении перемещения штоков пневмоцилиндра 1 и гидроцилиндра 2, и имеет возможность поперечного перемещения в направлении сжимающего усилия от фрикционного тормозного устройства 3. В исходное положение гидроцилиндр 2 устанавливается с помощью пружины 21. Жесткие центры мембран тормозных устройств 3 и 4 поджаты пружинами 22, 28. Линейка 23 тормозного устройства 4 соединена серьгой 24 со штоком пневмоцилиндра 1. Управляющая микроЭВМ 12 соединена цепями, передающими сигналы х, y1. y6, с датчиком 11 обратной связи и электромагнитными клапанами 5-10. Датчик 11 связан с линейкой 23 шестерней 20. Поршень гидроцилиндра 2 подпружинен пружинами 25, 26, размещенными в полостях, соединенных между собой через дроссель 27.
Пневматический позиционный привод работает следующим образом.
В исходном положении поршень пневмоцилиндра 1 находится в крайнем левом положении, т. е. бесштоковая полость через электромагнитный клапан 5 соединена с атмосферой, а в штоковую полость через клапан 6 подается сжатый воздух под магистральным давлением. Тормозные устройства 3 и 4 расторможены, т. е. через клапаны 8 и 10 подводится магистральное давление, а через 7 и 9 атмосферное. Гидроцилиндр 2 находится в нейтральном положении за счет пружин 25 и 26.
Управляющие сигналы с микроЭВМ 12 подаются на электромагнитные клапаны 5-10, следовательно в исходном состоянии на клапан 5 сигнал не подан y1=0, на клапан 6 подан y2=1, на клапан 7 сигнал не подан y3=0, на клапан 8 сигнал подан y4=1, на клапан 9 сигнал не подан y5=0, на клапан 10 сигнал подан y6= 1, следовательно система управления выдает сигнал:010010 для приведения привода в исходное положение.
Точки позиционирования определяются технологическим процессом и записаны в памяти микроЭВМ 12.
Система управления работает в двух режимах: "обучение" и "работа". В режиме "обучения" производится обучение привода выходу на координату позиционирования. Алгоритм обучения основан на коррекции точки включения тормозного устройства 4, а следовательно, второго тормозного пути. Торможение привода осуществляется в два этапа: первая ступень торможения включение тормозного устройства 3, вторая включение тормозного устройства 4. В момент начала перемещения микроЭВМ 12 передает на клапаны 5-10 сигнал 100101, т.е. происходит соединение бесштоковой полости пневмоцилиндра 1 с магистральным давлением, штоковой с атмосферой. В зависимости от координаты позиционирования выбирается точка включения первой ступени торможения. Точка включения тормозного устройства 4 назначается для каждой позиции в начале работы, а затем корректируется. Информация по координате х непрерывно передается в микроЭВМ 12 и сравнивается с заданной координатой. При достижении точки хт1 (хт1 точка включения тормозного устройства 3) включается первая ступень торможения, при достижении точки хт2 вторая ступень торможения.
Если заданная и фактическая координаты не совпадают, то точка хт2 корректируется на величину несовпадения и производится следующий такт обучения. Выбор точки хт2 производится в режиме "обучения" до тех пор, пока заданная координата не будет совпадать с действительной в пределах допуска (примерно за 2-4 попытки обучения). Точка включения первой ступени торможения не корректируется. При включении тормозного устройства 3 на клапан 9 подается сигнал 101001. В результате чего линейки 16 и 18 соединяются между собой и прижимаются к роликам 13 качения. Под действием силы со стороны движущего поршня пневмоцилиндра 1 ролик 13 качения, находясь в соединении с линейками 16, 18 тормозного устройства, вращается, при этом шток пневмоцилиндра 1 соединяется со штоком пассивного тормозного гидроцилиндра 2 и продолжает движение, но скорость его уменьшается за счет перекачки жидкости (масла) из одной полости гидроцилиндра 2 в другую и падает до "ползучей скорости" примерно 0,1 м/с.
Чтобы избежать действия изгибающего момента на шток гидроцилиндра 2 при срабатывании тормозного устройства, его корпус снабжен роликовыми опорами 14 и установлен с возможностью поперечного перемещения в направлении сжимающего усилия от фрикционного тормозного устройства 3 в пределах хода жесткого центра мембраны 19 порядка 1.2 мм. Окончательное торможение привода осуществляется тормозным устройством 4, линейка 23 которого жестко связана со штоком пневмоцилиндра 1.
Время срабатывания тормозных устройств 3, 4 составляет ≈ 0,01, с. диаметр поршня гидроцилиндра 2 равен 45 мм, ход пружин 25, 26 примерно 20 мм при диаметре поршня пневмоцилиндра 80 мм. В момент срабатывания тормозного устройства 4 на клапаны 5-10 подается сигнал 101010, в результате чего привод останавливается. В режиме "работа" аналогично осуществляется позиционирование привода из одной точки в другую.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД | 2009 |
|
RU2450174C2 |
| Позиционный пневматический привод | 1988 |
|
SU1508015A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ДЛИННОМЕРНОГО ПРОКАТА В ЗОНУ ОБРАБОТКИ | 1994 |
|
RU2104115C1 |
| Позиционный пневматический привод | 1988 |
|
SU1536090A1 |
| Струйная позиционная пневматическая система привода длинноходовых установочных координатных перемещений | 2023 |
|
RU2802568C1 |
| Система и способ управления пневматическим приводом вагонного замедлителя | 2020 |
|
RU2750559C1 |
| Модуль манипулятора | 1991 |
|
SU1776556A1 |
| Система управления пневматическим приводом вагонного замедлителя | 2021 |
|
RU2773117C1 |
| ПОЗИЦИОННЫЙ ПНЕВМОГИДРАВЛИЧЕСКИЙ ПРИВОД | 1993 |
|
RU2074329C1 |
| Устройство для управления тормозами транспортного средства при испытаниях на роликовом стенде | 1983 |
|
SU1147625A1 |
Использование: в приводах автоматов, автооператоров и промышленных роботов. Сущность: пневматический позиционный привод содержит силовой пневмоцилиндр, демпфирующий гидроцилиндр, два фрикционных тормозных устройства, двухпозиционные электромагнитные клапаны, управляющую микроЭВМ, датчик обратной связи, ролики; при этом для повышения быстродействия и точности и уменьшения габаритов штоки пневмоцилиндра и пассивного гидроцилиндра соединяются фрикционным тормозным устройством, в момент включения 1 ступени торможения, и прижимается к роликам. Гидроцилиндр имеет возможность перемещаться в пределах хода тормозного устройства в направлении действия сжимающего усилия. 1 ил.
ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД, содержащий силовой пневмоцилиндр, установленный на основании, два тормозных устройства фрикционного типа для взаимодействия с линейками тормозных устройств, соединенными со штоком пневмоцилиндра, микроЭВМ, подключенную к двухпозиционным электромагнитным клапанам, связанным с полостями тормозных устройств и полостями пневмоцилиндра, а также датчик обратной связи и тормозной пассивный гидроцилиндр, полости которого соединены между собой через дроссель, а поршень подпружинен с двух сторон пружинами, размещенными в его полостях, отличающийся тем, что шток указанного гидроцилиндра размещен между одним из тормозных устройств и соответствующей линейкой, снабженной роликами качения, оси которых неподвижно закреплены на основании, а корпус гидроцилиндра снабжен роликовыми опорами и установлен с возможностью поперечного перемещения в направлении сжимающего усилия от фрикционного тормозного устройства.
| Позиционный пневматический привод | 1988 |
|
SU1508015A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
