ющим, которые входят в продольные пазыю новения со ступенчатой поверхностью
одной из лапок 16 и 17. Затем в рабо чую полость силового цилиндра 25 под ется рабочее тело, например сжатый
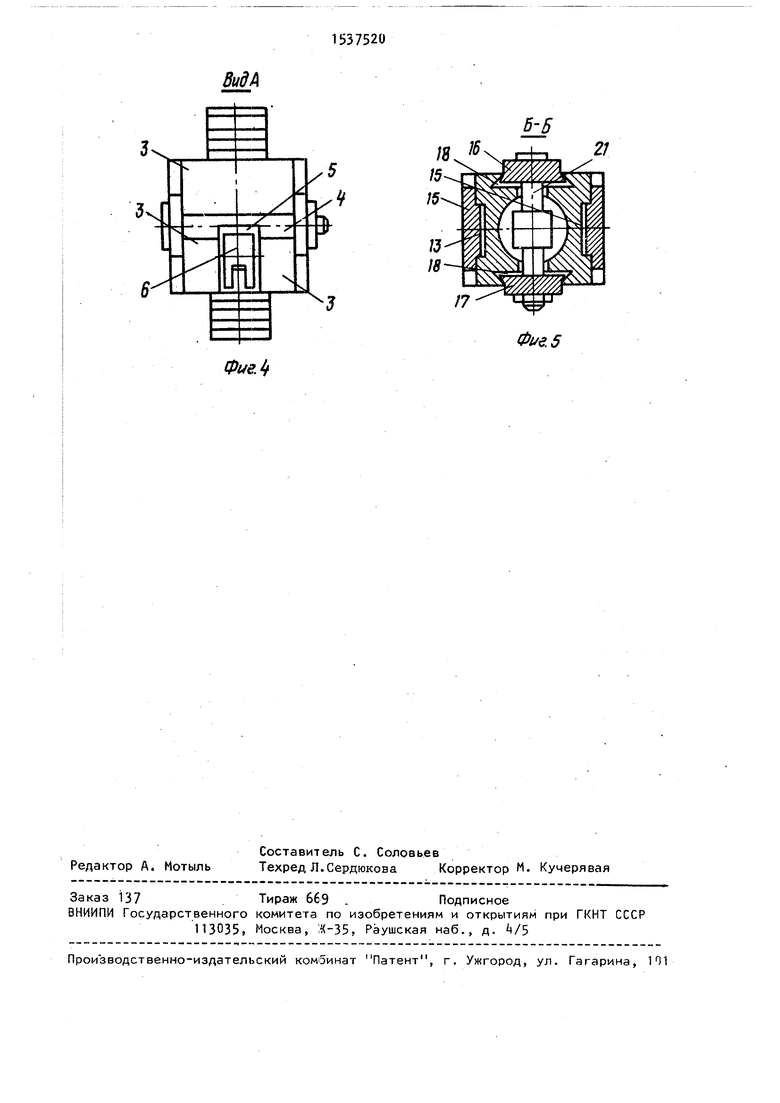
15, выполненные на боковых стенках корпуса 1.
Захват снабжен лапками 16 и 17 выодной из лапок 16 и 17. Затем в рабочую полость силового цилиндра 25 подается рабочее тело, например сжатый
полненными в виде двух фигурных пружин- воздух. Шток 24, сжимая пружину 23, ных пластин, установленных в продоль- 45 перемещает палец 21 и закрепленные на
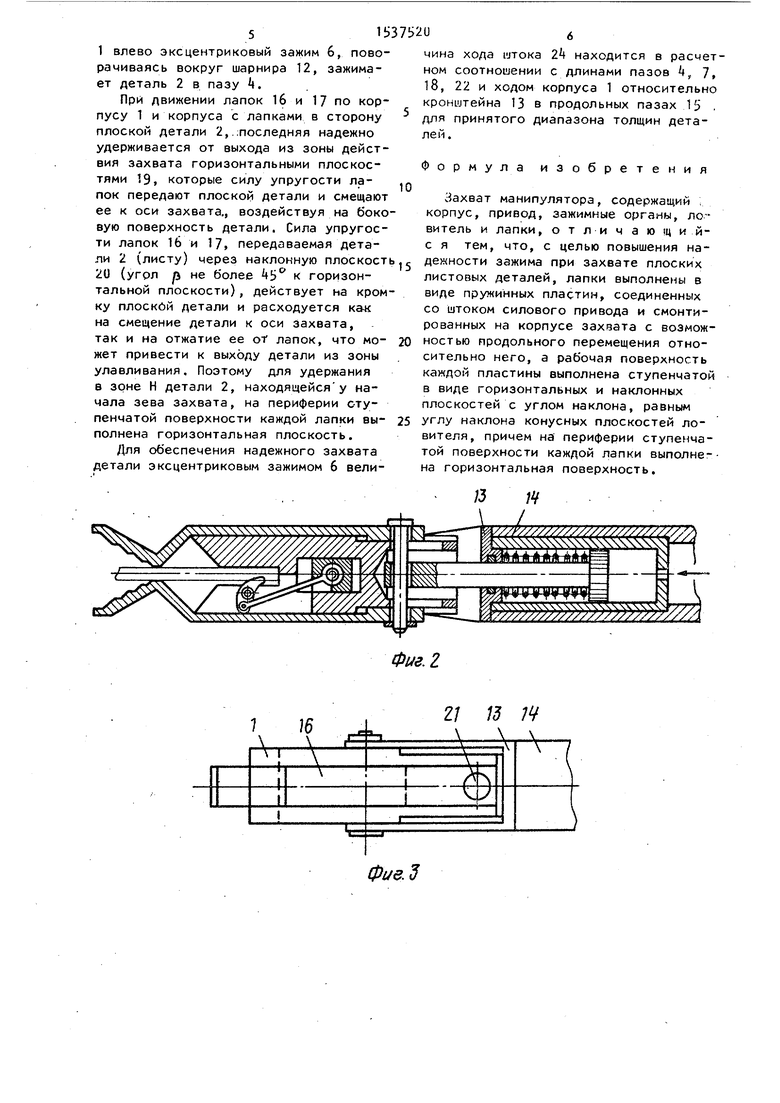
ные пазы 18 нижней и верхней стенок корпуса 1 захвата. Форма пазов 18 обеспечивает возможность лапкам 16 и Г/ перемещаться вдоль корпуса 1, не выходя из пазов. Рабочая поверхность лапок 16 и 17 выполнена ступенчатой из горизонтальных 1S и наклонных 20 плоскостей с углом наклона, равным углу наклона конусных плоскостей ловителя 3.
Лапки 16 и 17 при помощи пальца 21, размещенного в пазах 22 корпуса 1, соединены с подпружиненным пружиной 23 штоком 24 силового цилиндра
50
нем лапки 16 и 17 по корпусу 1 в направлении схватываемой детали 2. Улавливающая ступенчатая поверхность лапок 16 и 17, воздействуя на деталь 2 своими горизонтальными 15 и наклонными 20 плоскостями, за счет упругости пластин смещается вместе с деталью к осевой линии и направляет деталь в зев корпуса захвата. При дальнейшем 55 движении штока 24 палец 21 упирается в терец пазов 22 и перемещает корпус 1 захвата влево по направляющим кронштейна 13 манипулятора и направляющим ползуна 8, При перемещении корпуса
новения со ступенчатой поверхностью
одной из лапок 16 и 17. Затем в рабочую полость силового цилиндра 25 подается рабочее тело, например сжатый
воздух. Шток 24, сжимая пружину 23, перемещает палец 21 и закрепленные на
нем лапки 16 и 17 по корпусу 1 в направлении схватываемой детали 2. Улавливающая ступенчатая поверхность лапок 16 и 17, воздействуя на деталь 2 своими горизонтальными 15 и наклонными 20 плоскостями, за счет упругости пластин смещается вместе с деталью к осевой линии и направляет деталь в зев корпуса захвата. При дальнейшем движении штока 24 палец 21 упирается в терец пазов 22 и перемещает корпус 1 захвата влево по направляющим кронштейна 13 манипулятора и направляющим ползуна 8, При перемещении корпуса
г//Г/7///////////////У/7////.
УчУ
и
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1977 |
|
SU662341A1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ КОРПУСОВ АМПУЛ С ПУЧКАМИ ОТРАБОТАВШИХ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ | 2014 |
|
RU2553277C1 |
| Манипулятор для захвата и переноса листовых заготовок | 1972 |
|
SU519252A1 |
| Буровая машина | 1985 |
|
SU1262033A1 |
| Установка для упаковывания кип волокнистого материала | 1987 |
|
SU1521664A1 |
| Манипулятор | 1981 |
|
SU1050860A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| Схват | 1989 |
|
SU1701516A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
Изобретение относится к машиностроению и может быть использовано в автоматических станочных линиях. Цель изобретения - повышение надежности при захвате плоских листовых деталей. Для этого захват снабжен лапками 16, 17, рабочая поверхность которых выполнена ступенчатой из горизонтальных 19 и наклонных 20 плоскостей. Лапки установлены в пазах 18 корпуса 1 захвата с возможностью перемещения вдоль корпуса, который смонтирован на руке манипулятора с возможностью продольного перемещения относительно кронштейна 13. В пазу 7 корпуса захвата размещен ползун 8, связанный с эксцентриковым зажимом 6, установленным в корпусе захвата. При подаче в полость цилиндра 25 сжатого воздуха шток 24 перемещает палец 21 и закрепленные на нем лапки 16, 17 по корпусу 1. Ступенчатые поверхности лапок воздействуют на деталь 2 и смещаются вместе с ней к осевой линии захвата, направляя деталь в зев захвата. При дальнейшем движении штока палец 21 упирается в торец пазов 22 и перемещает корпус захвата по направляющим кронштейна 13 и ползуна 8. При этом эксцентриковый зажим 6, поворачиваясь, зажимает деталь 2 в пазу 4. 5 ил.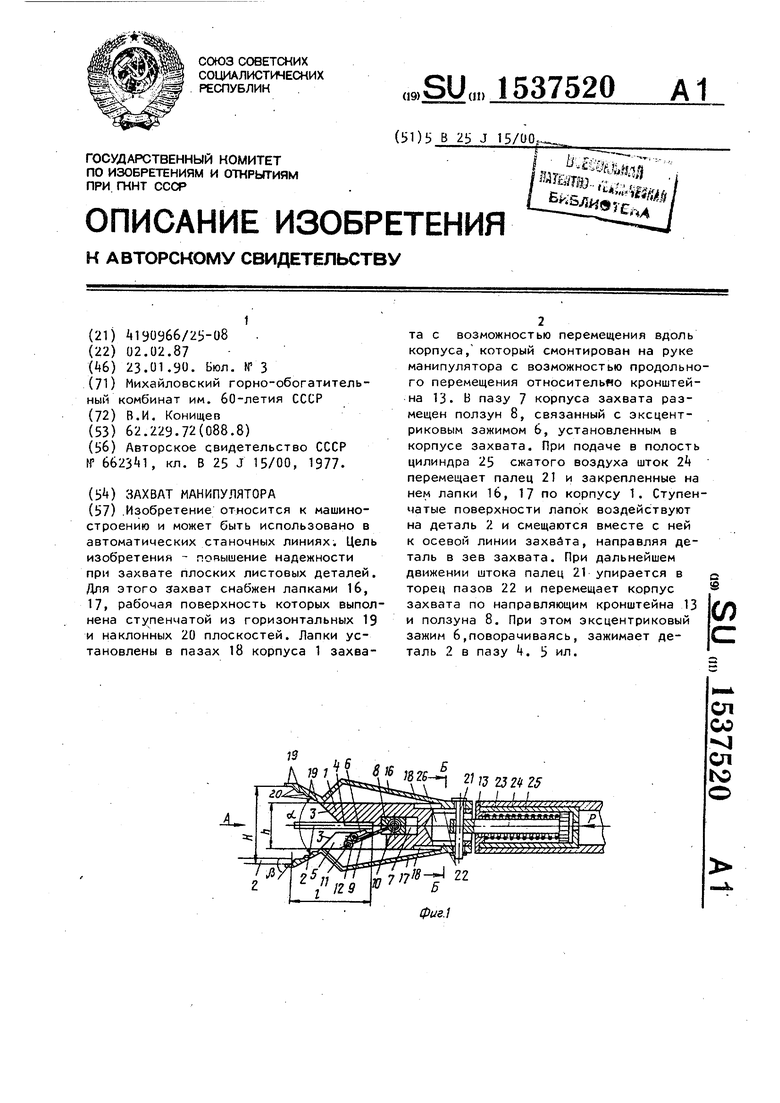
Фиг.1
фие.З
Фие.$
21
17
Фие.5
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
