Изобретение относится к погрузочно-разгрузочным машинам и устройствам и может найти применение при механизации штамповочных работ, например, при изготовлении деталей из листовых заготовок методом холоднолистовой штамповки.
Известен манипулятор для захвата и переноса листовых заготовок, включаюп;ий в себя раму, перемещаемую относительно несуш;ей балки, с установленными на пей транспортными катками и механизм фиксации с приводом. Манипулятор перемещается на тележке относительно рабочего проема пресса и стопорится относительно последнего в рабочем положенин. Однако в таком манипуляторе не обеспечивается достаточная жесткость фиксации. С целью устранения указанного недостатка ь предлагаемом.манипуляторе механизм фиксации выполнен в виде жестко укрепленных па верхней части рамы крюков с обращенными вниз трапецеидальными зевами, охватывающими клиновые направляющие несущей балки, а также имеющихся в нижней части рамы U-образных захватов, каждый из которых снабжен распорным клином, подпружиненным относительно рамы и контактирующим с предусмотреннымн па балке наклонными направляющими, причем транспортные катки подвижны относительно рамы от привода.
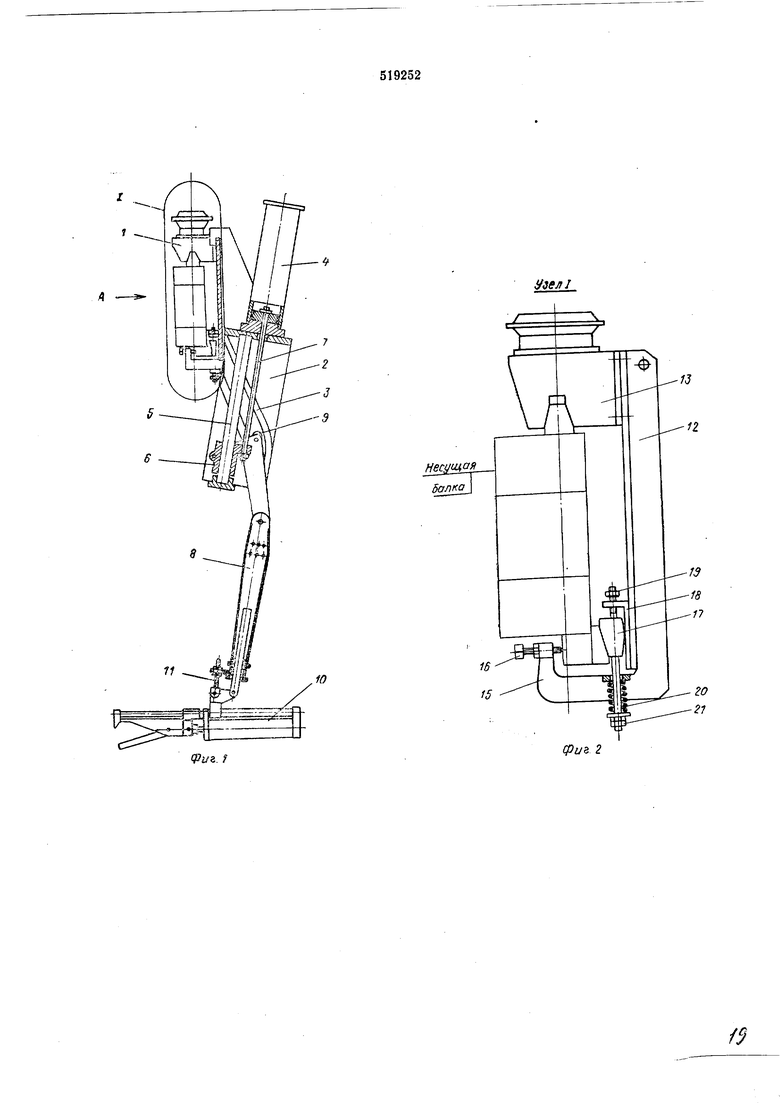
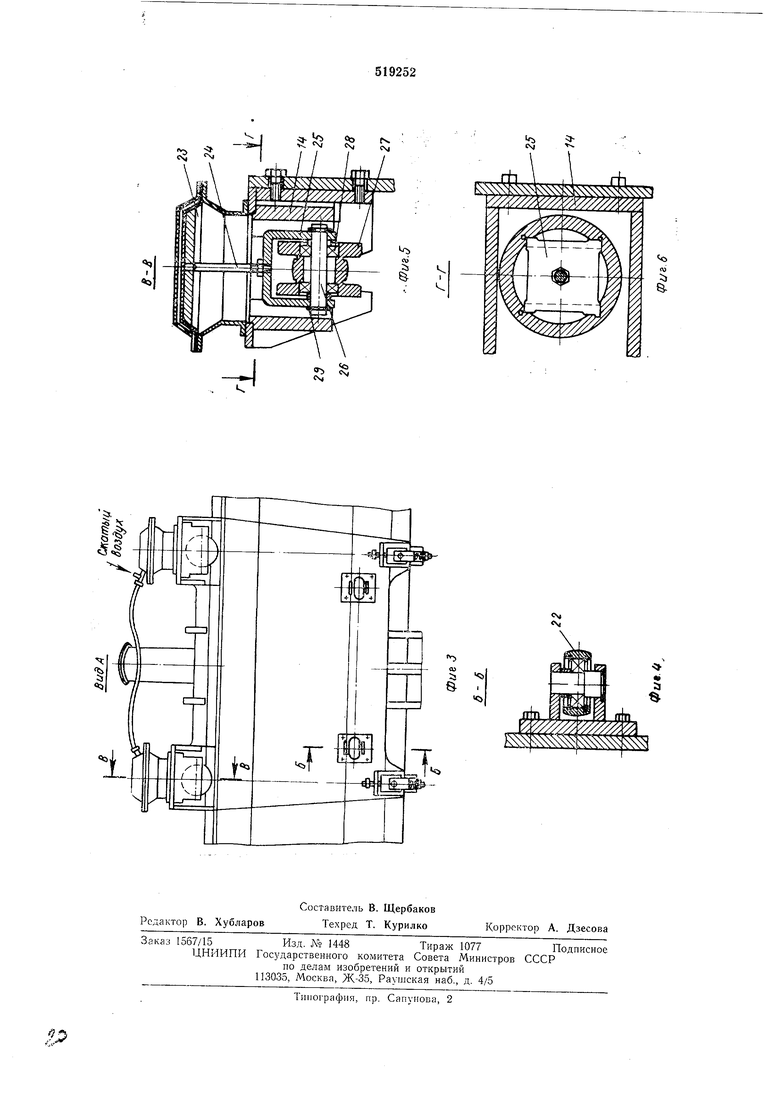
На фиг. 1 схематично изображен предлааемый манипулятор для захвата и переноса листовых заготовок, общий вид, разрез; па фиг. 2 - узел I на фиг. 1; на фиг. 3 - вид по стрелке А на фиг. 1; па фиг. 4 - сечение по Б-Б на фиг. 3; на фиг. 5 - сечение по В-В на фиг. 3; на фиг. 6 - разрез по Г-Г на фиг. 5.
Манипулятор включает в себя тележку 1 с жестко укрепленным па ней корпусом 2, на котором неподвижно укреплены направляющие 3, приводпой пневмоцилиндр 4 и П1танга 5. По штанге 5 перемещается ползун 6, жестко связанный со штоком 7 пневмоцилиидра 4. С ползуном 6 шарпирно соединена рычажная система 8, снабженная двумя роликами 9, которые перемещаются по направляющим 3. К рь1чажной системе 8 шарнирно прикреплены ппевмоклеп1,и 10, изменяющие свой наклон относительно горизонтали с помощью винта 11. Манипулятор имеет также тележку, состоящую из рамы 12 (фиг. 2), к которой крепятся два крюка 3 с трапецеидальными зевами. Крюки выполнены зацело с направляющими 14 (фиг. 6). В нижней части рамы 12 укреплены два U-образных захвата 15, кахедый из которых снабжен регулировочным упорным винтом 16, распорпым клином 17, укрепленпым в отверстии корпуса 18 при помощи гайки 19. Корпус 18 неподБИЖпо закреплен па раме. На штоке клппа 17 установлена нажимная пружина 20, закрепляемая при помощи регулировочных гаек 21.
Кроме этого, тележка снабжена двумя опорными катками 22 (фиг. 4). На направляющих 14 сверху установлены пневмокамеры 23, на щтоках 24 которых укреплены корпуса 25. В корпусах 25 на осях 26 укреплены транспортные катки 27. Катки вращаются на подщипниках 28. Ось 26 стопорят кольцами 29. Корпуса 25 вместе с катками 27 перемещаются в вертикальном направлении в пазах направляющих 14 с помощью пневмокамеры 23.
Манипулятор может находиться в двух положениях: в транспортном и рабочем.
В транспортном положении сжатый воздух подают в верхние полости пневмокамер 23, вследствие чего штоки 24 перемещаются вниз корпусом 25 совместно с транспортными катками 27 по направляющим 14. Транспортные катки 27, опираясь на трапециевидный рельс несущей балки, приподнимают тележку манипулятора относительно несущей балки. При этом между зевами крюков 13, винтами 16 U-образных захватов 15, клиньями 17 и несущей балкой образуются зазоры. Клинья под действием пружин 20 садятся гайками 19 на корпуса 18, а нижняя часть тележки опирается опорными катками 22 на несущую балку. В этом положении «рука манипулятора посредством транспортных и опорных катков перемещается по несущей балке относительно проема пресса в ту или другую сторону.
В рабочем положении манипулятор стопорится относительно несущей балки (а значит, и пресса) под действием собственного веса. Для этого верхние полости пневмокамер соединяют с атмосферой.
Под действием собственного веса тележка перемещается вниз относительно транспортных катков 27, при этом крюки 13 с трапецеидальными зевами опускаются на рельс несущей балки. Клинья 17 с определенной силой входят между несущей балкой и корпусом 18, осуществляя выбор зазоров между винтами 16 и несущей балкой. К моменту полного выбора зазоров в U-образных захватах осуществляется плотная посадка крюков 13 на рельс несущей балки. Манипулятор оказывается прочно закрепленным относительно несущей балки (и пресса) в четырех точках. После стопорения манипулятор может осуществлять рабочий цикл по захвату и перемещению деталей.
Рабочий цикл происходит в следующей поел едов ательности.
По соответствующей команде пневмоклещи 10 захватывают деталь. Затем подают сжатый воздух в пневмоцилиндр 4. Шток 7, втягиваясь в пневмоцилиндр, перемещает ползун 6 по щтанге 5. Вместе с ползуном перемещается вверх рычажная система 8, одновременно поворачиваясь на щарнире относительно ползуна 6 вследствие того, что ролики 9 перемещаются по направляющим 3. Таким образом пневмоклещи перемещают деталь в нужное положение. Затем подается команда на разжим пневмоклещей, и деталь освобождается. Далее осуществляют реверсирование движения што1ка 7 пневмоцилиндра, и всю рычажную систему вместе с пневмоклещами возвращают в исходное положение.
Формула изобретения
Л1анипулятор для захвата и переноса листовых заготовок, содержащий раму, перемещаемую относительно несущей балки, с установленными на ней транспортными катками и механизм фиксации с приводом, отличающийся тем, что, с целью повьинения жесткости фиксации, механизм фиксации выполнен в виде жестко укрепленных на верхней части рамы крюков с обращенными вниз трапецеидальными зевами, охватывающими клиновые направляющие несущей балки, а также имеющпхся в части, рамы U-образных захватов, каждый из которых снабжен распорным клином, подпружиненным относительно рамы и контактирующим с предусмотренными на балке наклонными направляющими,
причем транспортные катки подвижны относительно рамы от привода.
10
. /
Узел I
13
п
Cpuz 2
k
I
k
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ремонта регенератора металлургической печи | 1983 |
|
SU1121568A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ГОРЯЧЕЙ ОБЪЕМНОЙ ШТАМПОВКИ ПРЕИМУЩЕСТВЕННО ЗВЕНЬЕВ ГУСЕНИЧНОЙ ЦЕПИ | 1992 |
|
RU2035254C1 |
| Устройство для сборки,вальцовки и сварки кузовов шахтных вагонеток | 1985 |
|
SU1306676A1 |
| Станок для заплетки канатов | 1976 |
|
SU614144A1 |
| УСТАНОВКА ДЛЯ ЛОМКИ ПРУТКОВЫХ И ТРУБЧАТЫХ МАТЕРИАЛОВ | 1990 |
|
RU2025231C1 |
| Устройство для сборки и сварки кузовов легковых автомобилей | 1978 |
|
SU763056A1 |
| СПОСОБ ЗАБИВАНИЯ И ИЗВЛЕЧЕНИЯ ИЗ ГРУНТА МЕТАЛЛИЧЕСКИХ СТОЛБИКОВ ПРЕИМУЩЕСТВЕННО ПРИ ВОЗВЕДЕНИИ И РЕМОНТЕ БАРЬЕРНЫХ ОГРАЖДЕНИЙ АВТОМОБИЛЬНЫХ ДОРОГ И КОПРОВЫЙ МАНИПУЛЯТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2211895C2 |
| Устройство для пакетирования штучных изделий | 1987 |
|
SU1654179A1 |
| Устройство для перегрузки подвесок с траверс подвесного конвейера | 1981 |
|
SU1004227A1 |
| Пильно-обрабатывающее устройство для обработки пластикового профиля | 2019 |
|
RU2710702C1 |