Л Д л ,/4
W 5
2 J6
;;
сл
о
Isd
tc
со
сх
Ю //
31
Изобретение относится к машиностроению, а именно к конструкциям манипуляторов.
Целью изобретения является расши- рение технологических возможностей.
На чертеже изображено захватное устройство.
Устройство содержит корпус 1 силового цилиндра, в котором размещен поршень 2 со штоком 3 и пружиной 4. Конец штока 3 выполнен в виде кулачка 5 и установлен с возможностью взаимодействия с зажимными губками 6 Последние размещены внутри фланца 7, подпружинены и закреплены в корпусе силового цилиндра. Фланец 7 расположен на передней части корпуса 1 и снабжен направляющими пальцами 8. Причем количество пальцев 8 зависит от количества граней подаваемой F. станок детали и равно 1/2 их количества, но не менее трех. На концах направляющих пальцев 8 для уменьшени трения подвижно закреплены шарики 9.
Корпус 1 силового цилиндра выполнен с цапфой 10, расположенной во внутреннем кольце обгонной муфты 11. При этом цапфа 10 и внутреннее кольцо обгонной муфты 1 1 образуют шарико- вую пару винт - гайка. Обгонная муфт 11 жестко закреплена на основании 12 предназначенном для установки на руке манипулятора.
Средняя часть корпуса 1 выполнена с кольцевым выступом 13, размещенным с возможностью йращения в опоре 14. Опора 14 установлена с возможностью возвратно-поступательного перемеще
отверстия для размещения в. них пальцев 8 захватного устройства.
Каретка манипулятора перемещает устройство по направлению к зажимному устройству станка. С момента, когда направляющие пальцы 8 упрутся во фланец шпинделя станка, прекращается горизонтальное перемещение корпуса 1. Основание 12 с обгонной муфтой 11 продолжает перемещаться влево и благодаря наличию шариковой пары винт - гайка заставляет вращаться корпус 1. При этом опора 14 в . направляющих 15 занимает правое положение, пружина 16 сжимается, а направляющие пальцы 8 шариком 9 скользят по фланцу.
При совмещении направляющих пальцев 8 с отверстиями на фланце пружина 16 перемещает опору 14 с корпусом I по направляющим 15 влеро, а деталь 18 занимает фиксированное положение относительно произвольно установившегося зажимного устройства станка (например, двухкулачкового патрона). После захвата детали 18 зажимным уст ройством правая полость цилиндра соединяется с атмосферой. Пружина 4 возвращает поршень 2 в исходное положение и зажимные губки 6 освобождают деталь 18. Устройсто перемещаетг ся вправо.
Формула изобретения
Захватное устройство, включающее основание, на котором установлен в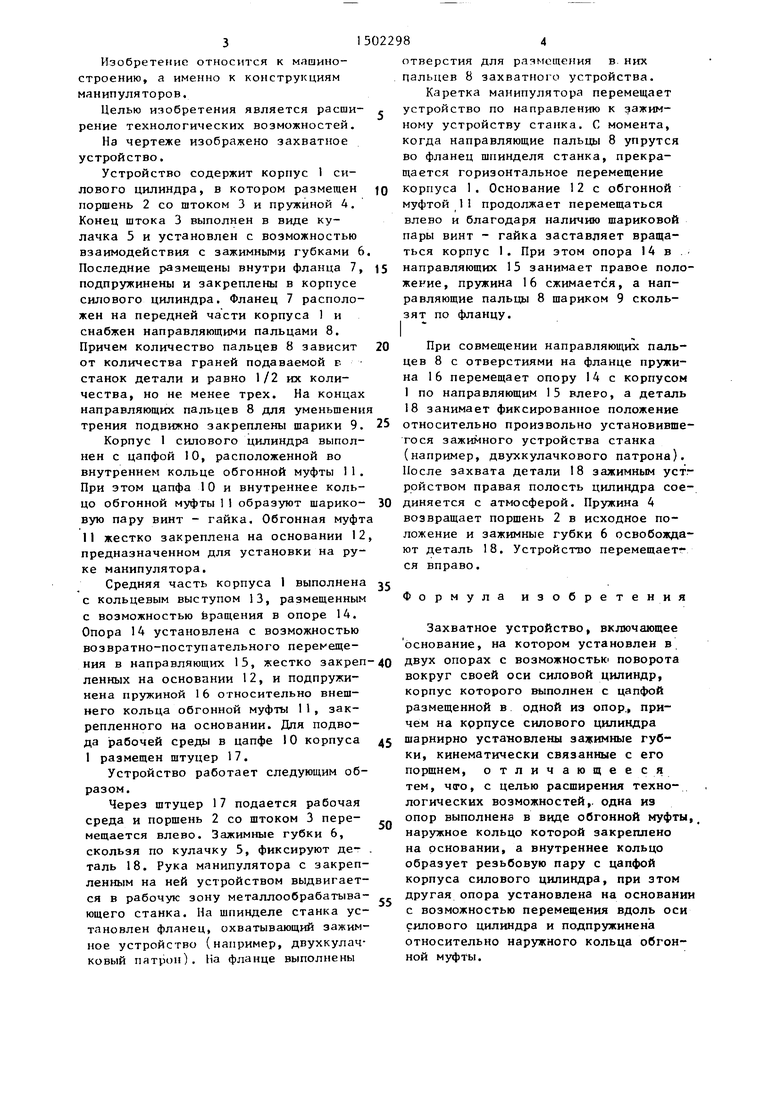
| название | год | авторы | номер документа |
|---|---|---|---|
| Зажимное устройство и станок, оборудованный таким устройством | 2020 |
|
RU2759352C1 |
| Устройство для автоматической смены инструмента | 1982 |
|
SU1074700A1 |
| Привод зажимного устройства | 1988 |
|
SU1585091A1 |
| Установка для центробежной биметаллизации втулок | 1984 |
|
SU1260110A1 |
| Манипулятор | 1982 |
|
SU1018774A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Устройство для обработки ленточного материала | 1988 |
|
SU1516199A1 |
| Двухкулачковый поворотный патрон | 1978 |
|
SU780977A1 |
| Устройство к протяжным станкам для закрепления нежестких деталей | 1985 |
|
SU1329925A1 |
| Автоматизированная линия для многопереходной штамповки | 1986 |
|
SU1344471A1 |
Изобретение относится к машиностроению, а именно к конструкциям манипуляторов. Целью изобретения является расширение технологических возможностей. Зажимные губки 6, скользя по кулачку 5, фиксируют деталь 18. Направляющие пальцы 8 упираются в шпиндель станка, и перемещение корпуса 1 прекращается. Основание 12 продолжает перемещение и благодаря наличию пары винт-гайка заставляет вращаться корпус 1. При этом опора 14 перемещается вправо, пружина 16 сжимается, а направляющие пальцы 8 скользят по торцу шпинделя. После совмещения направляющих пальцев 8 с отверстиями на фланце шпинделя пружина 16 перемещает опору 14 по направляющим влево, и деталь занимает ориентированное положение в шпинделе станка. 1 ил.
иия в направляющих 15, жестко закреп-ДО Двух опорах с возможностью поворота
ленных на основании 12, и подпружинена пружиной 16 относительно внешнего кольца обгонной муфты 11, закрепленного на основании. Для подвода рабочей среды в цапфе 10 корпуса 1 размещен штуцер 17.
Устройство работает следующим образом.
Через штуцер 17 подается рабочая среда и поршень 2 со штоком 3 перемещается влево. Зажимные губки 6, скользя по кулачку 5, фиксируют де- таль 18. Рука манипулятора с закрепленным на ней устройством выдвигается в рабочук зону металлообрабатыва- ющего станка. На шпинделе станка установлен флянец, охватывающий зажимное устройство (например, двухкулач- коБЫЙ пятрон). На фланце выполнены
5
0
вокруг своей оси силовой цилиндр, корпус которого выполнен с цапфой размещенной в одной из опор., причем на кррпусе силового цилиндра шарнирно установлены задсимные губки, кинематически связанные с его поршнем, отличающееся тем, что, с целью расширения технологических возможностей,, одна из опор выполненз в виде обгонной муфты,, наружное кольцо которой закреплено на основании, а внутреннее кольцо образует резьбовую пару с цапфой корпуса силового цилиндра, при этом другая опора установлена на основании с возможностью перемещения вдоль оси силового цилиндра и подпружинена относительно наружного кольца обгонной муфты.
| Кисть механической руки промышленногоРОбОТА | 1979 |
|
SU841961A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
