Изобретение относится к машиностроению, а именно к промышленным роботам.
Целью изобретения является расширение технологических возможностей за счет регулировки угла поворота,
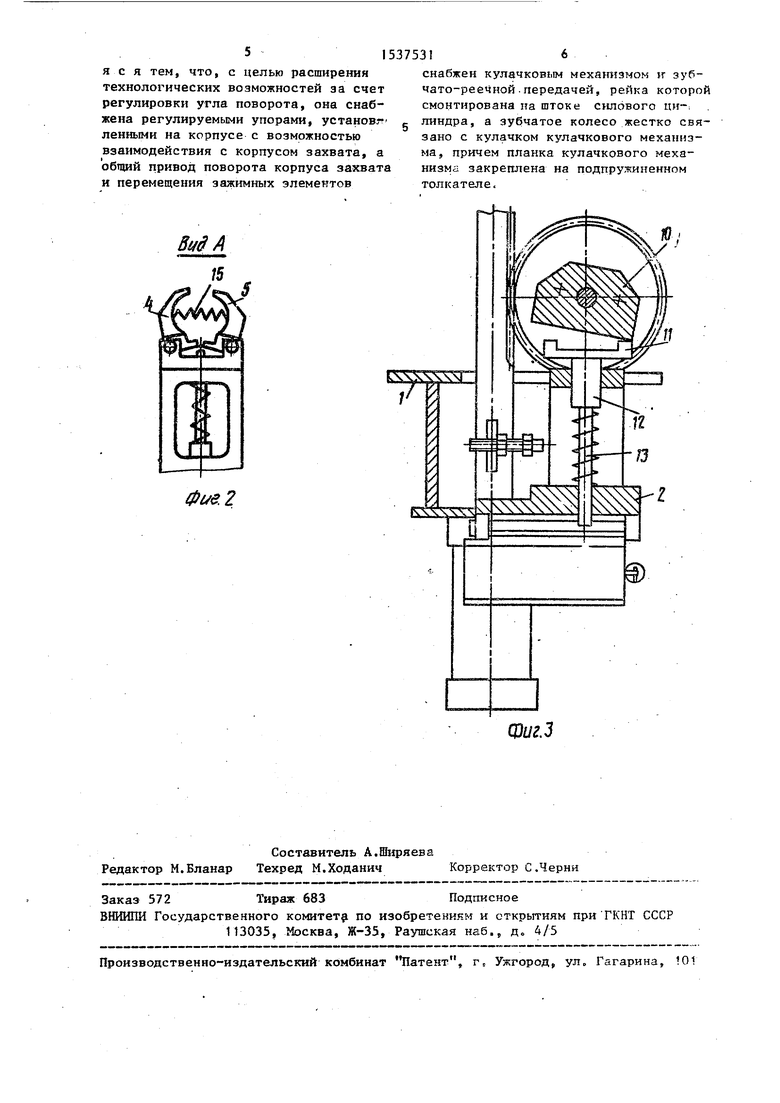
На фиг. изображена механическая рука в исходном положении, общий вид; на фиг.2 - вид А на фиг.; па фиг.З - механичэская рука в конечном положении.
Механическая рука содержит корпус 9, захват имеющий корпус 2, уставов- ленный с возможностью поворота вокруг оси 3, закрепленной на корпусе 1, п зажимные элементы 4 и 5, а также общий привод поворота корпуса захвата и перемещения зажимных элементов 9 вы- полненный в виде силового цилиндра 6, на штоке 7 которого смонтирована рейка 8 зубчато-.реечной передачи, а зубчатое колесо 9 этой передачи жестко связано с кулачком 10 кулачкового ме- ханизма и установлено на оси 3. Кулачок 10 выполнен двухсторонним и взаимодействует с планкой 1i, закрепленной на толкателе 12, установленном в направляющих корпуса 2 захвата и под- пружиненном относительно корпуса 2 захвата посредством пружины 13. Регулируемые упоры 14, установленные на корпусе 1, взаимодействуют с корпусом 2 захвата. Пружина 15 сжимает зажим- ные элементы 4 и 5 при захватывании детали.
Механическая рука работает следующим образом.
В исходном положении корпус 2 зах- вата взаимодействует с одним из регулируемых упоров 14, позволяющих точно выставить захват на позициях загрузк и выгрузки.Перемещение от силового цилиндра б через рейку 8 передается зубчатому колесу 9, которое вместе с закрепленным на нем кулачком 10 поворачивается вокруг оси 3 против часо- вой стрелки при неподвижном корпусе
2 захвата. При этом купачок 10, взаимодействуя с планкой 11, установленной на толкателе 12, перемещает последний вверх, сжимая пружину 13. Верхним торцом толкатель 12 взаимодействует с зажимными элементами 4 и 5 и, растягивая пружину 15, раскрывает их.
При подаче воздуха в противоположную полость силового цилиндра 6 его шток 7 с рейкой 8 начинает перемещаться в противоположную сторону, а зубчатое колесо 9 с кулачком 0 поворачивается вокруг оси 3 при неподвижном корпусе 2, давая возможность толкателю 12 под действием щ ужины 13 переместиться до тех пор, пока планка 11 полностью не войдет во взаимодействие с кулачком 10. Таким образом освобождаются зажимные элементы 4 и 5, которые под действием пружины 15 закрываются и захватывают деталь. Далее корпус 2 захвата поворачивается до взаимодействия с вторым регулируемым упором 14. При дальнейшем перемещении штока 7 силового цилиндра кулачок 10 поворачивается по часовой стрелке и, сжимая пружину 13, перемещает толкатель 12, разжимая зажимные элементы 4 и 5 захвата, освобождая деталь. Поворот корпуса 2 захвата в исходное положение осуществляется аналогично. Перестановку регулируемых упоров 14 осуществляют в зависимости от необходимого угла поворота захвата.
Формула изобретения
Механическая рука, содержащя корпус, захват, имеющий корпус и зажимные элементы, а также общий привод поворота корпуса захвата и перемеще- :вдя зажимных элементов, включающий счловой цилиндр со штоком и подпру- „тчненный толкатель, установленный в корпусе захвата, отличающаМА
Фиг. 2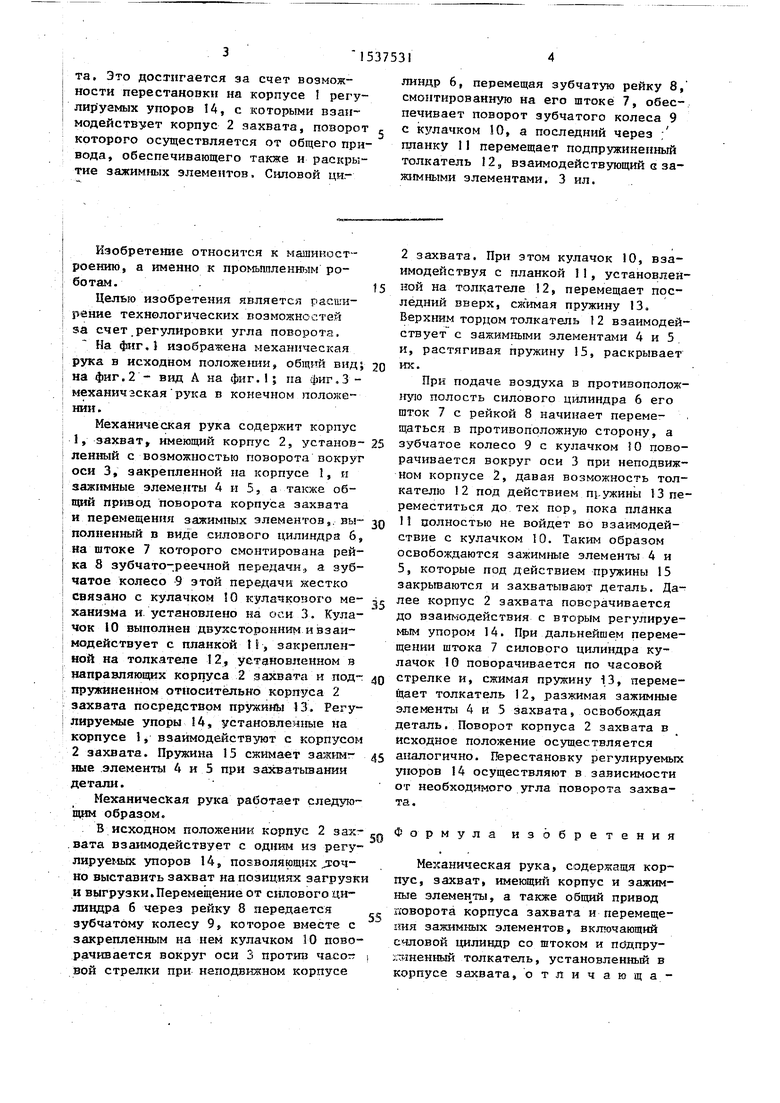
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической смены инструмента | 1986 |
|
SU1421483A1 |
| Поворотный стол | 1976 |
|
SU666047A1 |
| Механизм шаговой подачи | 1986 |
|
SU1349997A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Станок для расточки канавок во вкладышах подшипников | 1987 |
|
SU1480975A2 |
| Самоцентрирующий патрон | 1981 |
|
SU952456A1 |
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ РАДИОЭЛЕМЕНТОВ, ПРЕИМУЩЕСТВЕННО МИКРОСХЕМ, НА ПЕЧАТНУЮ ПЛАТУ | 1991 |
|
RU2026613C1 |
| ЗАКРУТОЧНАЯ ГОЛОВКА К АВТОМАТАМ ДЛЯ ЗАВЕРТЫВАНИЯ ИЗДЕЛИЙ | 1968 |
|
SU231371A1 |
| Автооператор | 1974 |
|
SU554129A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
Изобретение относится к машиностроению, а именно к промышленным роботам. Целью изобретения является расширение технологических возможностей за счет регулировки угла поворота. Это достигается за счет возможности перестановки на корпусе 1 регулируемых упоров 14, с которыми взаимодействует корпус 2 захвата, поворот которого осуществляется от общего привода, обеспечивающего также и раскрытие зажимных элементов. Силовой цилиндр 6, перемещая зубчатую рейку 8, смонтированную на его штоке 7, обеспечивает поворот зубчатого колеса 9 с кулачком 10, а последний через планку 11 перемещает подпружиненный толкатель 12, взаимодействующий с зажимными элементами. 3 ил.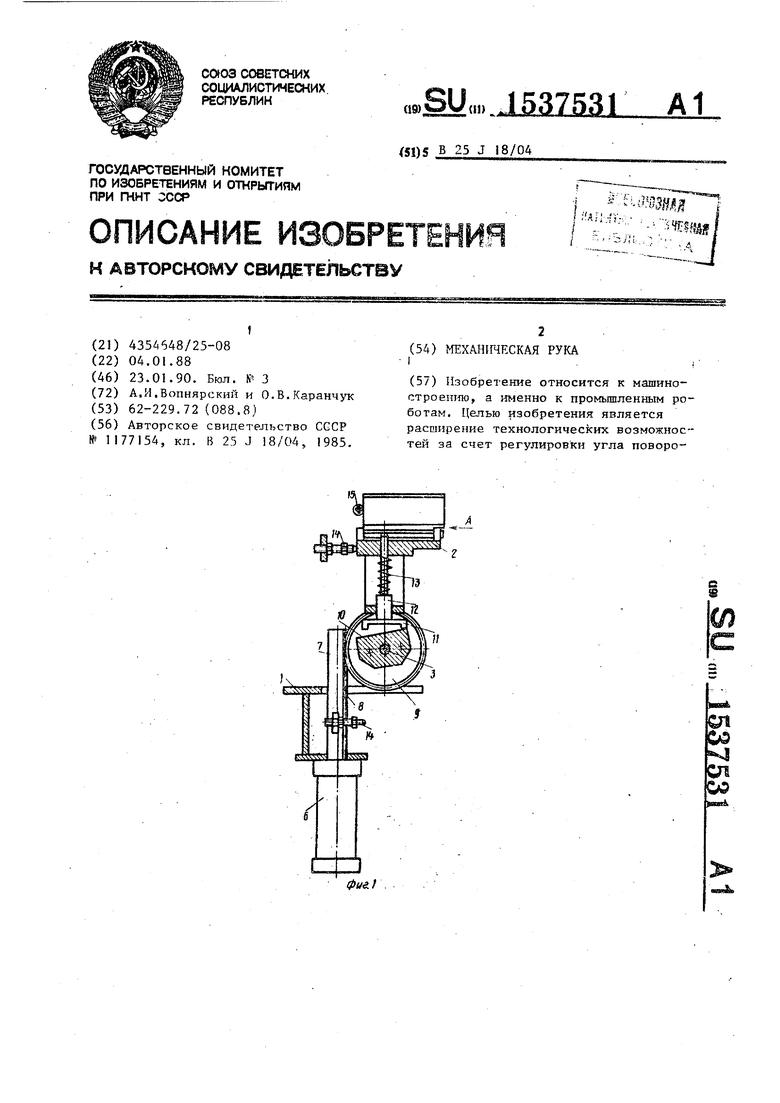
фиг.З
| Рука промышленного робота | 1983 |
|
SU1177154A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
