Изобретение относится к общему машиностроению, в частности к механизмам шаговой подачи рабочих органов автоматического оборудования.
Цель изобретения - расширение технологических возможностей путем обеспечения различных по величине шаговых перемещений.
На фиг. 1 изображен предлагаемый механизм, общий вид в разрезе; на фиг. 2 - разрез А-А на фиг. 1.
Механизм состоит из корпуса 1, в котором встроен привод в виде силового цилиндра 2 с поршне.м 3 и итоками 4 и 5. Штоки 4 и 5 жестко связаны с приЕЮдной рей10
щает ползун 13 вниз, при этом фиксатор 11 фиксирует колесо 10, а колесо 12 выходит из зацепления с колесом 10. Пружина 19 поворачивает поводок 18 обратно, только уже па угол ai, после чего команда повторяется п раз, и поршень 3 перемещается каждый раз на рабочий щаг. После прохождения запрограммированных п рабочих щагов толкатель 25 воздействует на плечо собачки 20 и поводок 18 поворачивается на угол а2, т.е. первоначальное положение до упора 21. При этом поршень 3 проходит конечный шаг, а поводок опять возвращается до упора 21 (поворачивается на угол ai). Планка 26 при этом упирается в корпус 1.
кой 6 посредством фланцев 7 и 8. Рейка 6 - Затем подается команда на возврат поршня
ии,.
25
взаимодействует с шестерней 9, которая жестко соединена с зубчатым колесом 10.С зубчатым колесом 10 последовательно взаимодействуют фиксатор 11 и поворотный зубчатый элемент в виде колеса 12, смонтированные на плечах запорно-передаточного ме- 20 ханизма, выполненного в виде ползуна 13 с приводом от силового цилиндра с мембраной 14. Фиксатор 11 приводится з движение от силового цилиндра с .мембраной
15.Обе мембраны подпружинены пружиной
16.Зубчатое колесо 12 посредством валика 17 жестко связано с поводком 18, подружиненны.м пружиной 19 кручения к собачке 20 или упору 21. Упор 21 служит для настройки механизма на начальный и конечный шаги. Поводок 18 имеет возможность также взаимодействовать с упором 22, служащим для настройки механизма на промежуточные рабочие щаги. Собачка 20 подпружинена фужиной 23 кручения к опорной поверхности корпуса 1, а упоры 21 и 22 являются переставными. Перестановка упоров с: 21 и 22 осуществляется в резьбовые отверстия 24, выполненные в корпусе 1 по окружности с шагом а. От перестановки упора
21 изменяется начальный и конечный шаги, а от перестановки упора 22 изменяются промежуточные шаги.40
С собачкой 20 взаи.модействует регулируемый толкатель 25, закрепленный на планке 26. Планка 26 при помощи винта 27 может устанавливаться относительно приводного силового цилиндра 2.
3 в исходное положение, для чего рабочая среда подается в полость 30 и воздействует на мембрану 15, при этом фиксатор 11 выходит из зацепления с колесом 10. Рабочая среда подается в полость 31 и поршень 3 возвращается в исходное положение, после чего механизм готов к следующему циклу.
Механизм п:аговой подачи обеспечивает возможность получения начального и конечных щагов, отличных от промежуточных, что позволяет осуществлять подвод рабочего органа и его вывод из рабочей зоны. Кроме того, обеспечение фиксации HjaroBoro механизма в двух направлениях позволяет использовать его в горизонталь- .,„ пых и вертикальных исполнениях.
45
Формула изобретения
1.Механизм шаговой подачи, содержа- П1ИЙ корпус с размешенными в нем собачкой, упорами и запорно-передаточным механизмом, имеющим два плеча, на одном из которых размещен поворотный зубчатый эле мент, а на другом - фиксатор с возможностью их взаимодействия с одним зубчатым колесом зубчатого блока, другое зубчатое кблесо которого кинематически связано с приводной рейкой, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен толкателем и под- пружиненны.м поводком, жестко закрепленным на поворотно.м зубчатом элементе с возможностью его взаи.модействия с упорами и собачкой, расположенной между упора.ми, а толкатель размещен на приводной рейке с возможностью его взаимодействия с собачкой.
Механизм работает следующим образом.
При подаче рабочей среды в полость 28 под мембрану 14 перемещается ползун 13. Когда фиксатор 11 выходит из зацепления, а колесо 12 входит в зацепление с зубчатым колесом 10, рабочая среда подается в полость 29. Поршень 3 перемешает рейку 6, которая поворачивает шестерню 9, а колесо 10 поворачивает колесо 12 с поводком 18 на угол 0,9. Поводок 18 при этом упира50
1.Механизм шаговой подачи, содержа- П1ИЙ корпус с размешенными в нем собачкой, упорами и запорно-передаточным механизмом, имеющим два плеча, на одном из которых размещен поворотный зубчатый элемент, а на другом - фиксатор с возможностью их взаимодействия с одним зубчатым колесом зубчатого блока, другое зубчатое кблесо которого кинематически связано с приводной рейкой, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен толкателем и под- пружиненны.м поводком, жестко закрепленным на поворотно.м зубчатом элементе с возможностью его взаи.модействия с упорами и собачкой, расположенной между упора.ми, а толкатель размещен на приводной рейке с возможностью его взаимодействия с собачкой.
2.Механизм по п. 1 отличающийся тем, что запорно-передаточный механиз.м выполнен в виде ползуна с приводом от силового цилиндра, а фиксатор выполнен в виде кольца с приводо.м от дополнительного силового цилиндра и установлен концентрично внутри
ется в упор 22, и поршень перемещается 55 штока основного силового цилиндра, причем
на начальный шаг. Затем происходит отсечка рабочей среды и пружина 16 перемеупоры выполнены переставными, а толкатели - регулируемыми.
щает ползун 13 вниз, при этом фиксатор 11 фиксирует колесо 10, а колесо 12 выходит из зацепления с колесом 10. Пружина 19 поворачивает поводок 18 обратно, только уже па угол ai, после чего команда повторяется п раз, и поршень 3 перемещается каждый раз на рабочий щаг. После прохождения запрограммированных п рабочих щагов толкатель 25 воздействует на плечо собачки 20 и поводок 18 поворачивается на угол а2, т.е. первоначальное положение до упора 21. При этом поршень 3 проходит конечный шаг, а поводок опять возвращается до упора 21 (поворачивается на угол ai). Планка 26 при этом упирается в корпус 1.
Затем подается команда на возврат поршня
f-i.
3 в исходное положение, для чего рабочая среда подается в полость 30 и воздействует на мембрану 15, при этом фиксатор 11 выходит из зацепления с колесом 10. Рабочая среда подается в полость 31 и поршень 3 возвращается в исходное положение, после чего механизм готов к следующему циклу.
Механизм п:аговой подачи обеспечивает возможность получения начального и конечных щагов, отличных от промежуточных, что позволяет осуществлять подвод рабочего органа и его вывод из рабочей зоны. Кроме того, обеспечение фиксации HjaroBoro механизма в двух направлениях позволяет использовать его в горизонталь- пых и вертикальных исполнениях.
с:
0
5
0
Формула изобретения
1.Механизм шаговой подачи, содержа- П1ИЙ корпус с размешенными в нем собачкой, упорами и запорно-передаточным механизмом, имеющим два плеча, на одном из которых размещен поворотный зубчатый элемент, а на другом - фиксатор с возможностью их взаимодействия с одним зубчатым колесом зубчатого блока, другое зубчатое кблесо которого кинематически связано с приводной рейкой, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен толкателем и под- пружиненны.м поводком, жестко закрепленным на поворотно.м зубчатом элементе с возможностью его взаи.модействия с упорами и собачкой, расположенной между упора.ми, а толкатель размещен на приводной рейке с возможностью его взаимодействия с собачкой.
2.Механизм по п. 1 отличающийся тем, что запорно-передаточный механиз.м выполнен в виде ползуна с приводом от силового цилиндра, а фиксатор выполнен в виде кольца с приводо.м от дополнительного силового цилиндра и установлен концентрично внутри
упоры выполнены переставными, а толкатели - регулируемыми.
3D
Ц}ие.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Храповой механизм | 1982 |
|
SU1067269A1 |
| Устройство для укладки в тару стержнеобразных предметов | 1982 |
|
SU1076360A1 |
| Устройство для кантования изделий | 1985 |
|
SU1265120A1 |
| Механизм шаговой подачи | 1979 |
|
SU986687A1 |
| КОДОВЫЙ МЕХАНИЗМ | 1993 |
|
RU2061822C1 |
| Устройство для подачи полосового материала в рабочую зону пресса | 1986 |
|
SU1371746A1 |
| СТАНОК ДЛЯ ОБРАБОТКИ КОЛЬЦЕВОГО ЖЕЛОБА | 1969 |
|
SU249232A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД САЯПИНА И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2131065C1 |
| ЗАПОР ДЛЯ ДВЕРЕЙ ТРАНСПОРТНОГО ВАГОНА | 1991 |
|
RU2061165C1 |
| Устройство для резки шпига и мясопродуктов | 1982 |
|
SU1132884A1 |
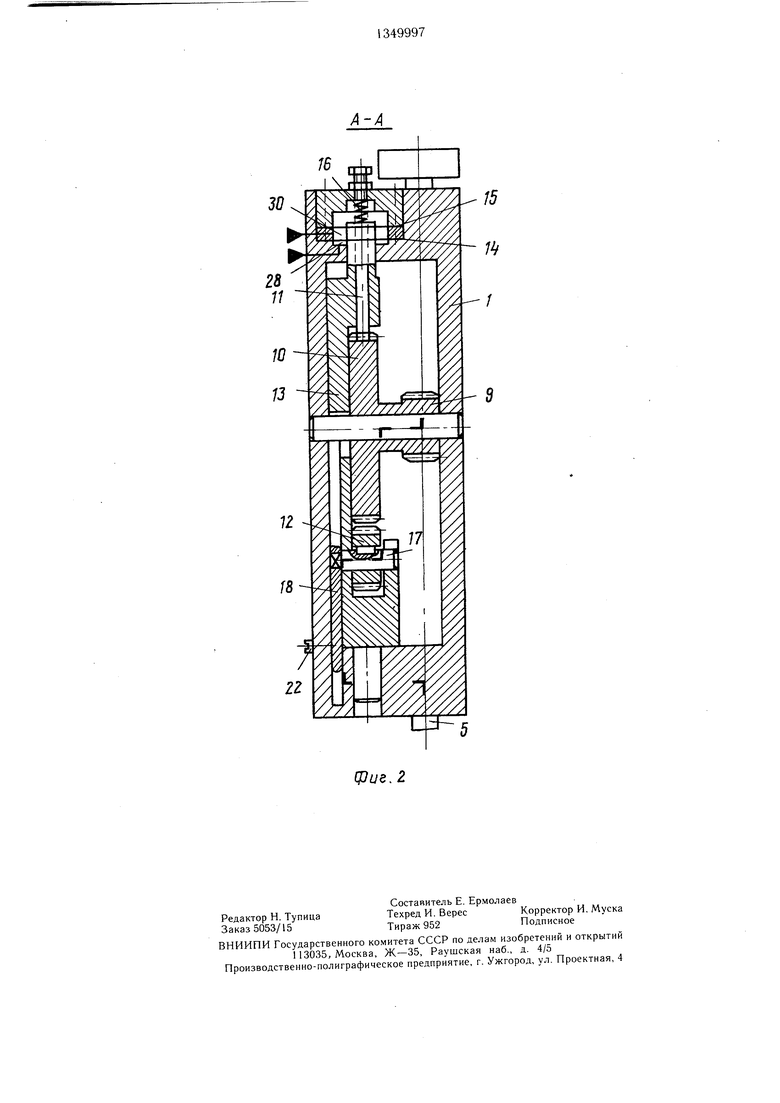
Изобретение относится к общему машиностроению, в частности к механизмам шаговой подачи рабочих органов автоматического оборудования. Целью изобретения является расширение технологических возможностей путем обеспечения различных по величине шаговых перемещений. Устройство включает ползун 13, на котором закреплены фиксатор 11 и зубчатое колесо 12. На колесе 12 закреплен подпружиненный поводок 18, взаимодействующий с собачкой 20 и переставными упорами 21, 22. Упоры 21, 22 расположены по окружности, концентричной зубчатому колесу 12 при его зацеплении с шестерней 10. Ползун 13 и фиксатор перемещаются от силового цилиндра с мембранами. Упоры 22 и 21 определяют начальный и конечный щаги, а упор 22 и собачка 20 - рабочие щаги рабочего органа. С собачкой 20 взаимодействует регулируемый толкатель 25, закрепленный на планке 26. 1 з.п. ф-лы, 2 ил. (Л со 4 QO СО СО 2S
| Манипулятор | 1984 |
|
SU1242344A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Устройство для укладки плоских изделий в стопу | 1983 |
|
SU1173577A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
