Изобретение относится к машиностроению, а именно к промышленным роботам.
Цель изобретения - упрощение конструкции.
На фиг.1 показана рука промышленного робота при вертикальном положении корпуса схвата (цангового), общий вид; на фиг.2 - то же, при горизонтальном положении корпуса схвата (цангового), общий вид; на фиг.З - то же, при вертикальном положении корпуса схвата (челюстного), общий вид; на фиг.4 - то же, при горизонтальном положении корпуса схвата (челюстного) , общий вид.
Рука промышленного робота содержит основание 1. Корпус 2 схвата установлен с возможностью поворота вокруг оси 3, закрепленной на основании 1 и обеспечивающей шарнирную связь корпуса 2 схвата с основанием 1.
В корпусе схвата выполнены направляющие 4, в которых подвижно установлен толкатель 5, пружина 6, установленная между толкателем 5 и пробкой 7, и регулирующая силу давления на толкатель. Корпус 2 схвата снабжен рычагами, несущими зажимные губки. Цанговый охват содержит зажимные губки - лепестки 8, а на толкателе 5 установлен распорный конус 9, челюстной схват содержит зажимные губки - челюсти 10, а толкатель установлен в направляющих 4.
Общий привод поворота корпуса 2 схвата и перемещения зажимных губок выполнен в виде шарнирно-рычажного механизма, содержащего толкатель 5 и тягу 11, один конец которой через окно, выполненное в корпусе 2 схвата, шарнирно соединен с толкателем 5, а второй конец тяги 11 шарнирно связан со щтоком 12 силового цилиндрра 13. Корпус силового цилиндра 13 жестко связан с основанием 1.
Рука промышленного робота работает следующим образом.
В исходном положении (фиг.1 и 3) рабочий агент, например воздух, подан в правую полость силового цилиндра 13, порщень находится в крайнем левом положении.
Через шток 12 усилие передается на тягу 11, которая прижимает толкатель 5 кверху, сжимает пружину 6 и отводит конус от лепестков цангового схвата (фиг.1) или разжимает челюсти (фиг.З). При подаче воздуха в левую полость силового цилиндра 13 шток 12 перемещается вправо. При этом в первый момент освобождается пружина б, конус 9 (фиг.2) опускается и разжимает лепестки цанги либо сжимает челюсти 10 челюстного схвата (возможна кинематика, при которой челюсти разжаты в этот момент). В следующий момент корпус 2 схвата поворачивается по часовой стрелке (по чертежу) до горизонтального положеиия. Дальнейшее перемещение поршня в силовом цилиндре 13 вправо приводит к сжатию пружины 6 и обратному перемещению толкателя 5 и соответственно сжатию лепестков цанги или перемещению челюстей. Далее при удалении сжатого воздуха из левой полости силового цилиндра 13 под воздействием пружины 6 происходит перемещение толкателя 5 и соответствующее перемещение лепестков ти челюстей, а при подаче сжатого воздухй в правую полость цилиндра 13 корпус 2 схвата возвращается в исходное положение (вертикальное), сжимается пружина 6 и перемещаются лепестки или челюсти.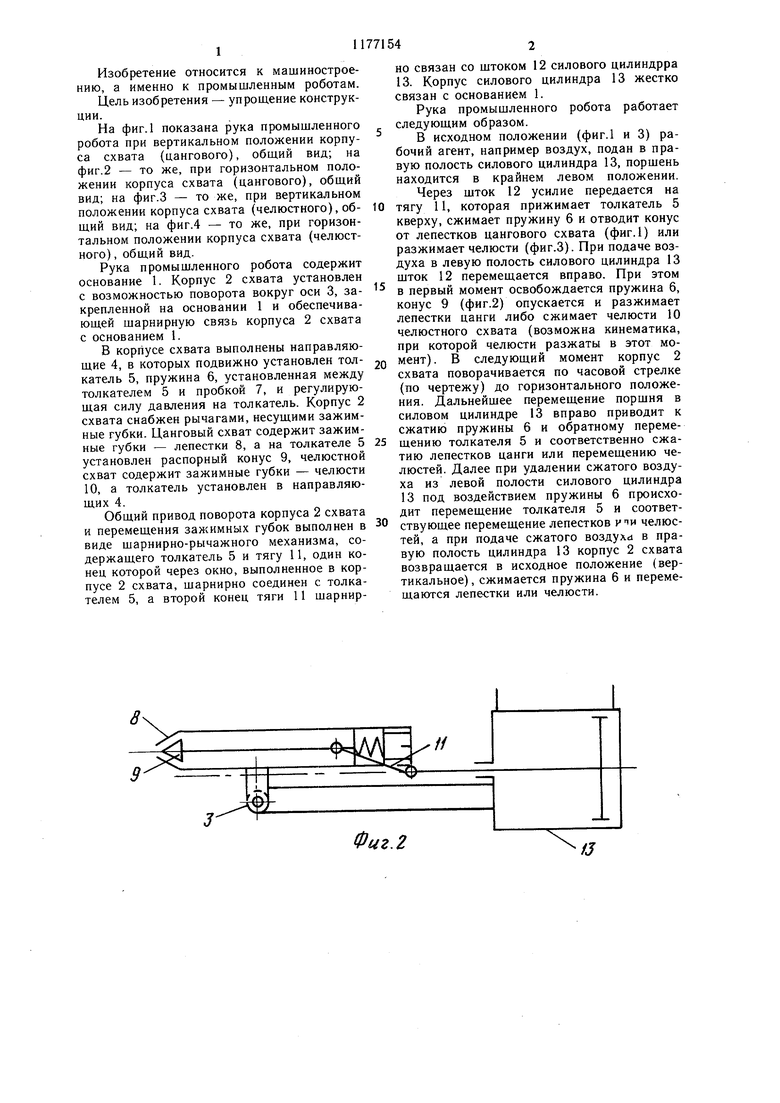
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1988 |
|
SU1830344A1 |
| ПРИВОД ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149097C1 |
| ПРИВОД ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2218269C2 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| Захватное устройство | 1991 |
|
SU1816688A1 |
| Схват промышленного робота | 1984 |
|
SU1250452A1 |
| Манипулятор | 1986 |
|
SU1430257A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Робототехнологический комплекс | 1985 |
|
SU1271742A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |

РУКА ПРОМЫШЛЕННОГО РОБОТА, содержащая основание, шарнирно связаиный с ним корпус схвата, снабженный рычагами, несущими зажимные губки. и общий привод поворота корпуса схвата и перемещения зажимных губок, включающий в себя силовой цилиндр, отличающаяся тем, что, с целью упрощения конструкции, общий привод выполнен в виде щарнирно-рычажного механизма, содержащего толкатель и тягу, причем шток силового цилиндра щарнирно связан с одним концом тяги, другой конец которой щарнирно соединен с толкателем, подпружиненным в направляющих корпуса схвата. i (Л / сд fj Фиг.1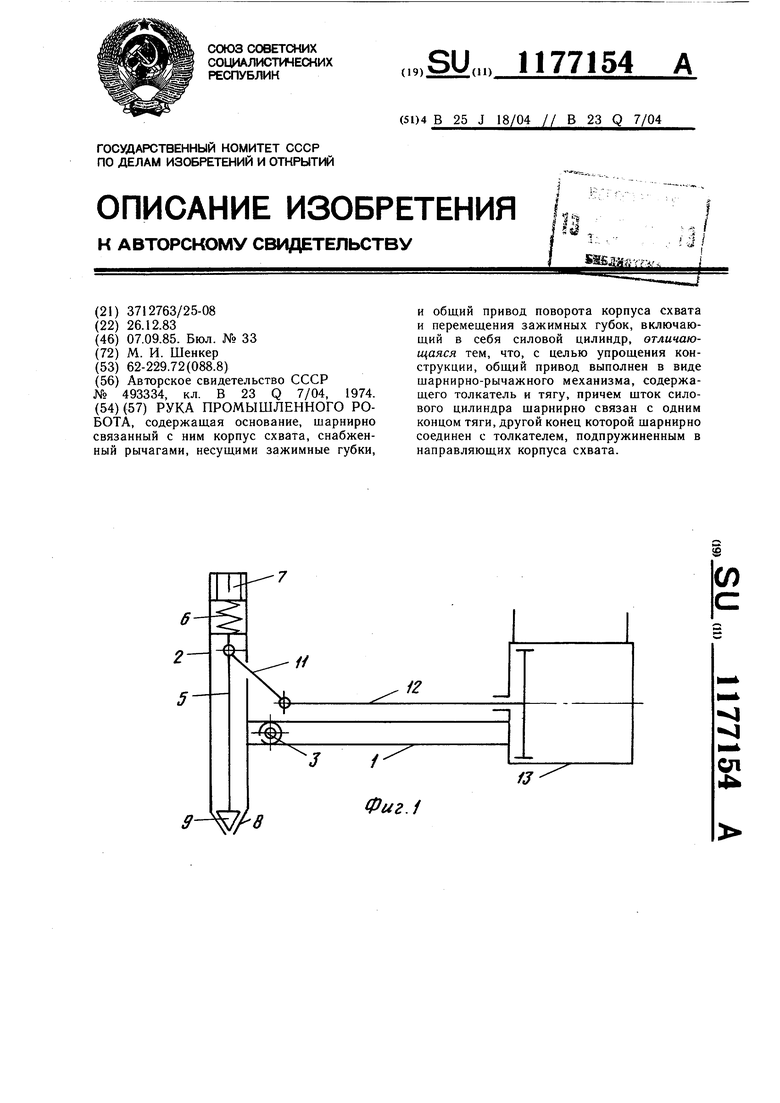
3о
10
13
Фиг.З
| Поворотное устройство | 1974 |
|
SU493334A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
