Изобретение относится к тракторостроению, в частности к автоматизированному управлению тракторами.
Цель изобретения - улучшение топливной экономичности и увеличение производительности путем повышения точности определения моментов изменения подачи топлива и переключения передачи.
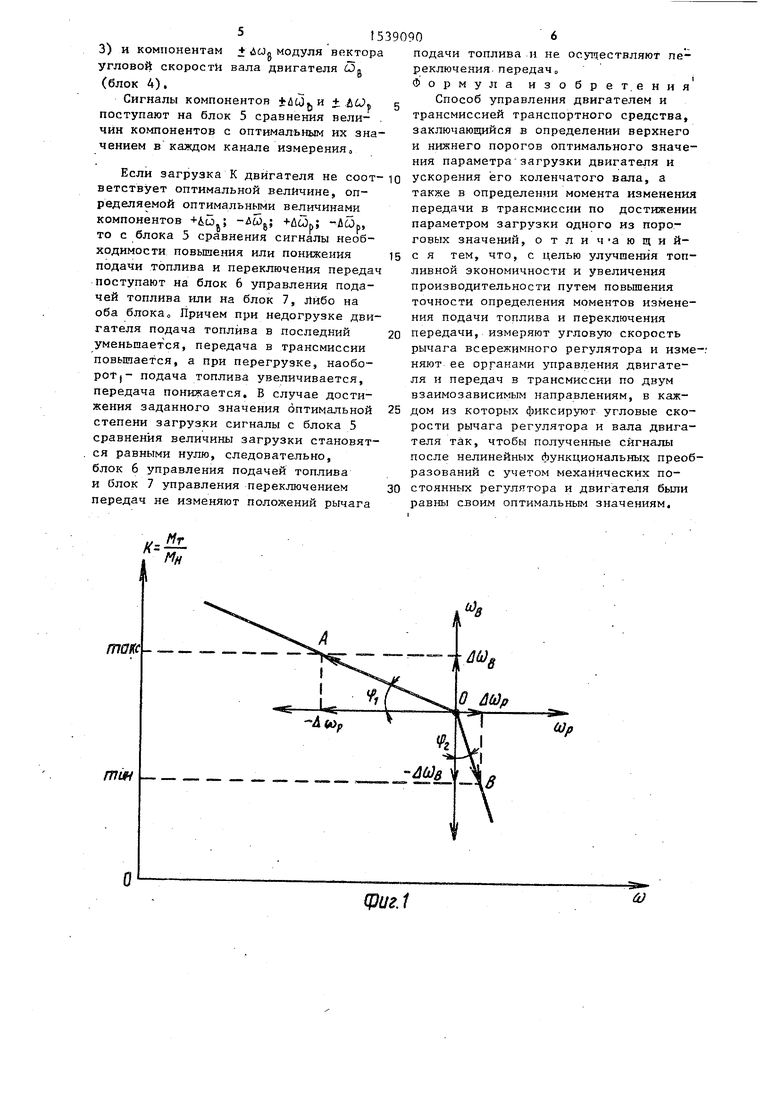
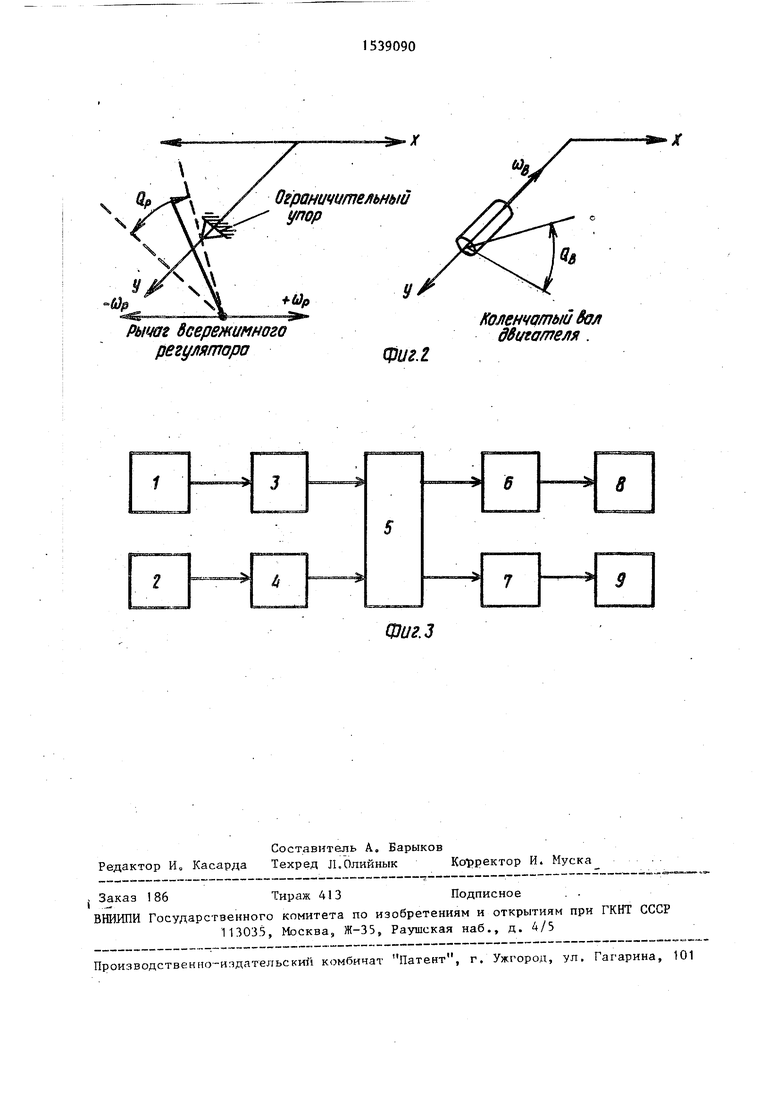
На фиг, 1 приведена скоростная (частичная) характеристика двигателя; на фиг. 2 - векторы мгновенных угловых скоростей рычага всережимного регулятора top и вала дизельного двигателя ЈL ;, на фиг.З - структурная схема устройства, реализующего предлагаемый способ.
Устройство (фиг.З) содержит измеритель 1 угловой скорости рычага всережимного регулятора, измеритель 2 скорости вала двигателя, каждый выход которых через соответствующий нелинейный функциональный преобразователь 3 и 4 подключен к входам блока 5 сравнения, соединенного с блоком 6 управления подачей топлива и с блоком 7 управления переключением передач.
Измерители 1 и 2 угловых скоростей представляют собой устройство, которое включает датчик угловых перемещений, датчик частоты вращения вала и измерительные схемы для получения сигналов, пропорциональных угловой скорости рычага СОр регулятора и вала двигателя 6J& (например, схема измерительного моста переменного тока).
сл
со
СО О
со
Нелинейный функциональный преобразователь 3(4) осуществляет операцию умножения двух сигналов, один из которых пропорционален модулю вектора угловой скорости С) (СОВ), а другой пропорционален синусу (или косинусу) угла между модулем вектора и его компонентом 4СОр (uOg) , которые могут быть реализованы на базе операцией- ных усилителей и ключей.
Блок 5 сравнения представляет собой линейный статический преобразователь, который осуществляет линейные операции над входными сигналами, со- храняя закон их изменения во времени Эти операции могут быть реализованы на основе дифференциальных операционных усилителей.
Блок 6 управления подачей топлива и блок 7 управления переключением передач представляют собой усилители мощности, каждый из которых формирует сигнал управления в форме удобной для исполнительного механизма 8 подачи топлива и исполнительного механизма 9 переключения передач в трансмиссии.
Сущность способа состоит в том, что фиксируют угловые скорости рычага всережимного регулятора и вала двигателя. Полученные сигналы подвергают нелинейным функциональным преобразованиям с учетом механических постоянных регулятора и двигателя так, что- бы исходные сигналы, пропорциональные модулю вектора угловых скоростей, имели компоненты и ДсоБ, по величинам и знакам которых судят о тенденции изменения нагрузочного режима,, При этом определяют моменты перемещения органа подачи топлива и переключения передач в трансмиссии по отношениям компонентов к их оптимальным значениям.,
На фиг.1 приведена зона К оптимальной загрузки двигателя по крутящему моменту, которая лежит между . точками А и В скоростной (частичной) характеристики, В точку 0 помещена прямоугольная система координат текущих значений компонентов вектора угловой скорости рычага Ыр регулятора и угловой скорости вала двигателя W. Зона К определяется отношением теку- щего значения момента М к номинальному М , которые пропорциональны отношениям текущего значения компонентов модуля векторов угловой скорости рычага ДСОр и угловой скорости вала дсо„ к номинальному их значению. Если по достижении нижнего оптимального значения загрузки (соответствует точке Bjta фиг Л) измеренные компоненты -AWjjH + AWp больше оптимального значения, то в последующий момент происходит разгрузка двигателя,
т.е. необходимо в зависимости от
скорости изменения компонентов - 4О. и +ДОр повысить передачу в трансмиссии или уменьшить подачу топлива Если измеренные компоненты -ДсЗр и +дЈ). меньше оптимальных значений, то в последующий момент происходит нагружение двигателя, т„е, он начинает работать в области оптимальной загрузки и поэтому повышать передачу в трансмиссии или уменьшать подачу топлива не следует.
Если по достижении верхнего оптимального значения загрузки (соответствует точке фиг.1) измеренные компоненты-Д(0р и +AdJ& больше оптимального значения, то в следующий момент происходит перегрузка двигателя, и необходимо, в зависимости от скорости изменения компонентов -ДСОр и +ДЙопонизить передачу в трансмиссии или увеличить подачу топлива, либо одновременно понизить передачу и увеличить подачу топлива0 Если измеренные компоненты -ДсЬрИ +U60 меньше оптимальных значений, то в следующий момент времени происходит разгру- жение двигателя, т„е, он начинает работать в области оптимальной загрузки и поэтому понижать передачу в трансмиссии и увеличивать подачу топлива не следует.
Устройство работает следующим образом.
При эксплуатации транспортных средств изменяются загрузка К и частота вращения вала Ufc, Изменение загрузки двигателя вызывает угловые перемещения рычага всережимного регулятора с угловой скоростью со. и скорости вращения валаСО&9 величины которых определяются с помощью измерителя 1 угловой скорости рычага и измерителя 2 угловой скорости валао Сигнал с каждого измерителя поступает на свой нелинейный функциональный преобразователь 3(4), на выходе котп- рых появляются сигналы, пропорциональные компонентам модуля вектора угловой скорости рычага (блок
3) и компонентам + дсОл модуля вектора угловой скорости вала двигателя ЈJg
(блок 4).
Сигналы компонентов iflCj H + Й6Л поступают на блок 5 сравнения вели- . чин компонентов с оптимальным их значением в каждом канале измерения
подачи топлива и не осуществляют пе реключения передачо Формула изобретени
Способ управления двигателем и трансмиссией транспортного средства заключающийся в определении верхнег и нижнего порогов оптимального знач
ния параметра загрузки двигателя и Если загрузка К двигателя не соот- ю ускорения его коленчатого вала, а
ветствует оптимальной величине, определяемой оптимальными величинами компонентов +Дс5.; +UCOpJ -АЙр, то с блока 5 сравнения сигналы необходимости повышения или понижения подачи топлива и переключения переда поступают на блок 6 управления подачей топлива или на блок 7, Либо на оба блока Причем при недогрузке двигателя подача топлива в последний уменьшается, передача в трансмиссии повышается, а при перегрузке, наоборот |- подача топлива увеличивается, передача понижается. В случае достижения заданного значения оптимальной степени загрузки сигналы с блока 5 сравнения величины загрузки становятся равными нулю, следовательно, блок 6 управления подачей топлива и блок 7 управления переключением передач не изменяют положений рычага
подачи топлива и не осуществляют переключения передачо Формула изобретения
Способ управления двигателем и трансмиссией транспортного средства, заключающийся в определении верхнего и нижнего порогов оптимального значетакже в определении момента изменения передачи в трансмиссии по достижении параметром загрузки одного из пороговых значений, отлич-ающийс я тем, что, с целью улучшения топливной экономичности и увеличения производительности путем повышения точности определения моментов изменения подачи топлива и переключения
передачи, измеряют угловую скорость рычага всережимного регулятора и изменяют ее органами управления двигателя и передач в трансмиссии по двум взаимозависимым направлениям, в каждом из которых фиксируют угловые скорости рычага регулятора и вала двигателя так, чтобы полученные сигналы после нелинейных функциональных преобразований с учетом механических постоянных регулятора и двигателя были равны своим оптимальным значениям.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЫСТРОХОДНОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2015 |
|
RU2645487C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЗАГРУЗКИ ДИЗЕЛЬНОГО ДВИГАТЕЛЯ | 2001 |
|
RU2198388C2 |
| Система автоматического переключения передач самоходной машины | 1988 |
|
SU1565733A1 |
| Устройство для автоматического управления фрикционами ступенчатой трансмиссии транспортного средства | 1984 |
|
SU1371932A1 |
| Система дистанционного управленияСудОВОй СилОВОй уСТАНОВКОй | 1979 |
|
SU822146A1 |
| Система автоматического управления гидромеханической трансмиссией | 1988 |
|
SU1602772A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1992 |
|
RU2011563C1 |
| Система автоматического регулирования загрузки главной энергетической установки, шага регулируемого винта и скорости судна | 1987 |
|
SU1505844A1 |
| Способ управления агророботом | 1987 |
|
SU1556557A1 |
| Устройство для автоматического управления двигателем и бесступенчатой трансмиссией самоходной машины | 1985 |
|
SU1350048A1 |
Изобретение относится к тракторостроению, в частности к автоматизированному управлению тракторами. Цель изобретения - повышение точности моментов изменения подачи топлива и переключения передач в динамике нагрузок. Сущность способа состоит в том, что фиксируют угловые скорости рычага всережимного регулятора и вала двигателя, а затем полученные сигналы подвергают нелинейным функциональным преобразованиям с учетом механических постоянных регулятора и двигателя так, что исходные сигналы, пропорциональные модулю вектора угловых скоростей, имеют компоненты Δ ωр и Δ ωв, по величинам и знакам которых судят о тенденции изменения нагрузочного режима, при этом определяют моменты перемещения органа подачи топлива и переключения передач в трансмиссии по отношениям компонентов к их оптимальным значениям. 3 ил.
I
К- - Мн
тин
О
d}p
фиг.1
и)
Ограничительный упор
-tip
+ир
Рычаг Всережимного регулятора
&-Х
Ufa
фиг. 2.
Коленчатый Вол двигателя.
Фиг.З
| Самоходный погрузчик | 1959 |
|
SU123074A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
