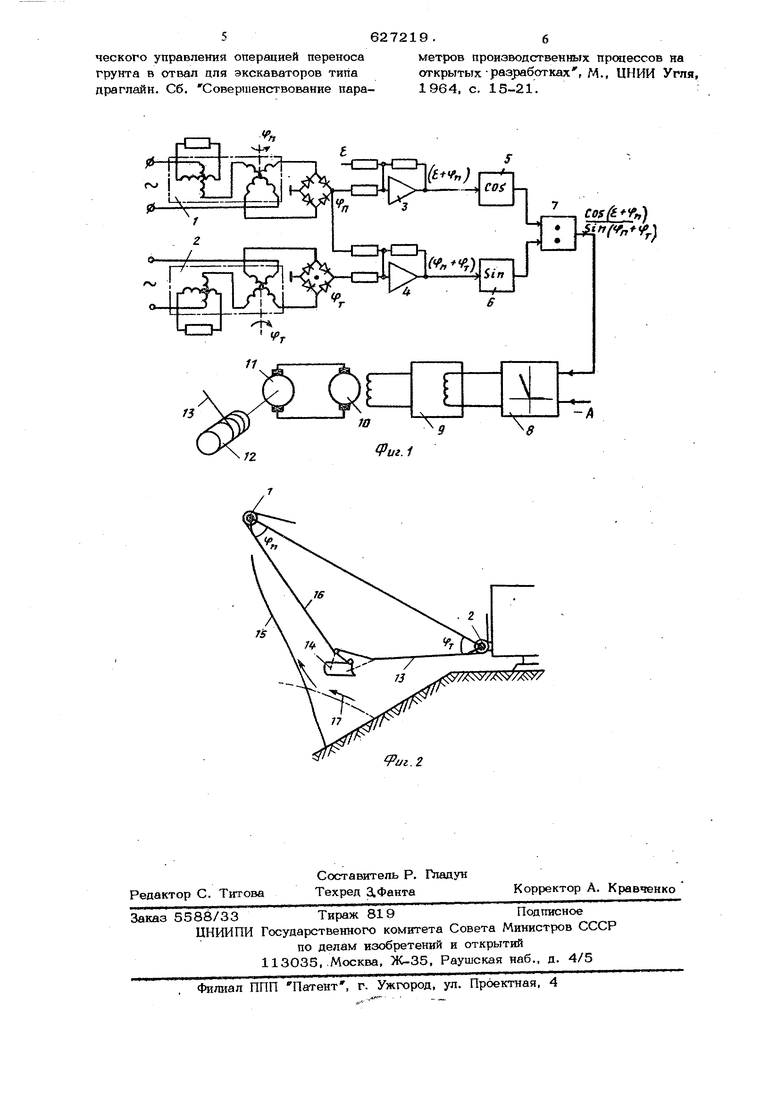
Изобретение относится к автоматическому управлению экскаваторами-драглайнами. Известен способ контроля положения ковша драглайна, обеспечивающий плавкое замедление движения ковша при входе в опасную зону с окончательной оста новкой его на малой скорости ClJ. Известен способ автоматического упра ления процессом транспортиров1ш ковша драглайна путем изменения управляющих сигналов приводов подъема и тяги по отклонению длин подъемного и тягового канатов от величины рабочей зоны 2j. Недостатком известных способов упра ления процессом транспортировки ковша является возможность преждевременной разгрузки ковша при выходе его за пред лы рабочей зоны разрешенных траекторий транспортировки в зону саморазгрузки, что нарушает нормальный ход рабочего процесса, т.е. снижается надежность выполнения процесса транспортировки ковша. Цель изобретения - повышение произ-: водительпости. Поставленная цель достигается тем, что дополнительно определяют величзть/ косинуса суммы угла наклона стрелы к горизонту и угла между осью стрелы и подъемным канатом и синуса суммы углов менаду осью стрелы и подъемным и тяговым канатами, определяют отношение между величинами, сравнивают его с заданным отношением- и по величине рассогласования корректируют управляющий сигнал на привод тяги. На границе кривой положений ковша, разделяющей область рабочих траекторий его транспортировки и зону разгрузки, COS ( Ч ) , raefj Jfj - углы отношение Sin(f, между осью стрелы и канатами подъема и тяги, а - угол наклона стрелы к горизонту, для каящого типа драглайна равно постоянной величине А, зависящей от конструкщш и параметров упряжи 362 ковша. Большим значениям этого отношения соответствует положение ковша в рабочей зоне, а меньшим - в зоне саморазгрузки. Таким образом, если при отрицаcosCtt) тельном значении разности ) - А f т.е. при выходе ковша в зону саморазгрузкн, подать на привод тяги сигнал, пропорциональный величине этой разноетн и обеспечивающий возвращение ковша в рабочую зону, тем самым можно исклк)чить возможность преждевременной саморазгрузки ковша, повысить надежность работы драглайна. На фиг. 1 приведена схема устрсйства реализующего способ; на фиг. 2 - расположение границы рабочей зоны относитель но стрелы и возможная траектория транспортировки ковша., Датчики угловil и 2 (например, линей ные вращающиеся транспорты) установлены у вершины и осневания стрелы и изме ряет углы менаду осью стрелы и канатами подъема и тяги. Выход датчика (его вы ходное напряжение пропорционально величине угла ffj между осью стрелы и подъемным канатом) подключен на входы операционных уси лзггелей Э и 4. Ко второму входу операциloiraoro усилителя 3 подключено напряжение, пропорциональное углу наклона стрелы к горизонту, а на второй вход опе рационного усилителя 4 подключен выход датчика 2, выходное напряжение которо-, го пропорционально углу Ут между осью стрелы и тяговым канатом. Выход опера дионного усилителя 3 подключен на вход косинусного фут сиионального преобразователя 5 (например, диодный преббразователь с линейно-кусочной аппроксимацией) .. а выход операционного усилителя 4 - на вход синусного функционального преобразователя 6, выходы преобразователей 5 и 6 подключены на вход делителя 7, а выход последнего подключен на один из двух входов элемента сравнения 3 (напри мер, операционный усилитель), на второй вход которого подключено напряжение, пропорциональное величине А, соответствующей положению ковша на границе зо- ны рабочих траекторий, а выход элемента сравнения 8 подключен на вход электропривода, состоящего из последовательно соединенных возбудителя 9, генератора 10 и двигателя 11, с валом которо.го соединена лебедка 12 с намотанным на нее тяговым канатом 13. .При транспортировке ковша 14 его по ложение относительно границы 15 зоны рабочих траекторий характеризуется угла4ми Тт и fri между осью стрелы и канатами 13 и 16. Если в процессе транспортировки траектории ковша направлены из рабочей зоны в зону саморазгрузки (например, траектория 17), то при этом уменьшается величина отношения OS(6-f V ) - и при пересечении границы ); 15 между рабочей зоной и зоной самоcoscetf } I разгрузки разность Sm(Y + 4p; становится отрицательной, с выхода элемента сравнения 8 на привод подается дополнительный сигнал, пропорциональный этой разности и обеспечивающий изменение траектории, исключающее выход ковша в зону саморазгрузки. При достаточно большом коэффициенте усиления системы регулирования транспортировка ковша в дальнейшем осуществляется вдоль границы 15 зоны саморазгрузки, исключая выход ковща в эту зону, который мог бы привести к прелшевременной разгрузке и прекращению рабочего процесса. Применение способа автоматического управления транспортировки ковша позволяет повысить надежность работы драглайна и способствует достижению максимальной производительности машины и обеспечению безаварийной транспортировки ковша к отвалу. Формула изобретения Способ автоматического управления процессом транспортировки ковша драглайна путем изменения управляющих сигналов приводов подъема и тяги по отклонению длин подъемного и тя1Х)Бого канатов от величины рабочей зоны, о т л и ч а и и с я тем, что, с целью повышения производительности, дополнительно определяют величины косинуса суммы угла наклона стрелы к горизонту и угла между осью стрелы и подъемньтм канатом и синуса суммы углов между осью стрелы и подъемным и тяговым канатами, определяют отношение между этими величинами, сравнивают его с заданным отношением и по величине рассогласования корректируют управляющий сигнал на привод тяги. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство СССР № 215807/кл. Н 02 Я 3/48, 1963. 2.Тихобаев В. М. Схемы автомати5627219.6
ческого управления операцией переносаметров производственных пршессов на
грунта в отвал для экскаваторов типаоткрытых разработках, М., ЦНИИ Угля,
драглайн. Сб. Совершенствование пара-1964, с. 15-21.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ защиты драглайна от аварийных режимов при транспортировке ковша и устройство для его осуществления | 1978 |
|
SU744076A1 |
| ЭКСКАВАТОР-ДРАГЛАЙНI 2LQEC111ШШ-'^ЮЗНАЯ^'^лНй^1ЕСКА1 | 1972 |
|
SU338595A1 |
| Экскаватор-драглайн | 1978 |
|
SU746049A2 |
| Способ оптимального управления электроприводами драглайна | 1979 |
|
SU926163A1 |
| Устройство для управления электрическим приводом тяги драглайна | 1975 |
|
SU717228A1 |
| Устройство управления процессом транспортирования ковша драглайна | 1988 |
|
SU1544898A1 |
| Способ управления электрическими приводами драглайна и устройство для его осуществления | 1978 |
|
SU742542A1 |
| Устройство управления электроприводом тяги экскаватора-драглайна | 1981 |
|
SU956697A1 |
| Способ оперативного контроля использования экскаватора-драглайна | 1986 |
|
SU1328451A1 |
| Способ управления электрическим проводом тяги драглайна | 1976 |
|
SU703630A1 |
IS S (Риг.1
Риг. 2 ti(
